一种基于免授权频谱的安全卸载方法
本发明属于无线通信领域,涉及一种基于免授权频谱的安全卸载方法。
背景技术:
1、随着5g移动通信网和物联网的快速发展,网络边缘设备的数量急剧增加,同时也产生了虚拟现实、增强现实等需要密集计算的新兴业务。由于有限的计算资源和功耗,移动用户很难保证新兴业务的服务质量。在传统网络中,移动用户的计算任务可以分流到云中心,然而云计算存在灵活性较差和时延较大的缺点。移动边缘计算(mobile edgecomputing,mec)通过将计算资源从云和数据中心移动到移动网络的边缘,能够有效地满足计算需求和降低通信时延。然而,位置固定的地面mec服务器与用户的非视距(non line ofsight,nlos)链路的信道质量较差,导致有限的通信速率。此外,地面mec服务器的服务灵活性差,不能有效满足发生自然灾害或偏远地区的通信和计算要求。具有灵活性高且不受自然灾害影响的无人机mec是解决上述问题的一种非常具有前景的方案。例如,无人机可以通过靠近移动用户飞行,以节能的方式卸载计算任务;无人机还可以建立与移动用户的视距(line of sight,los)链路,提高通信速率。
2、目前关于无人机安全卸载的研究主要考虑了地面窃听者。考虑空中窃听者的研究很少,空中窃听者需要与携带mec服务器的无人机保持最小安全距离。大多数对无人机轨迹的优化研究只考虑二维场景,很少有研究将免授权频谱、移动边缘计算、安全问题以及无人机三维轨迹优化相结合。将无人机mec系统引入免授权频段,需要考虑系统与wifi网络之间的干扰。通过对移动用户的功率控制,可以使得wifi用户能量检测出的结果小于规定的阈值(csma/ca协议中的规定),即wifi用户可与移动用户共用免授权频段。
技术实现思路
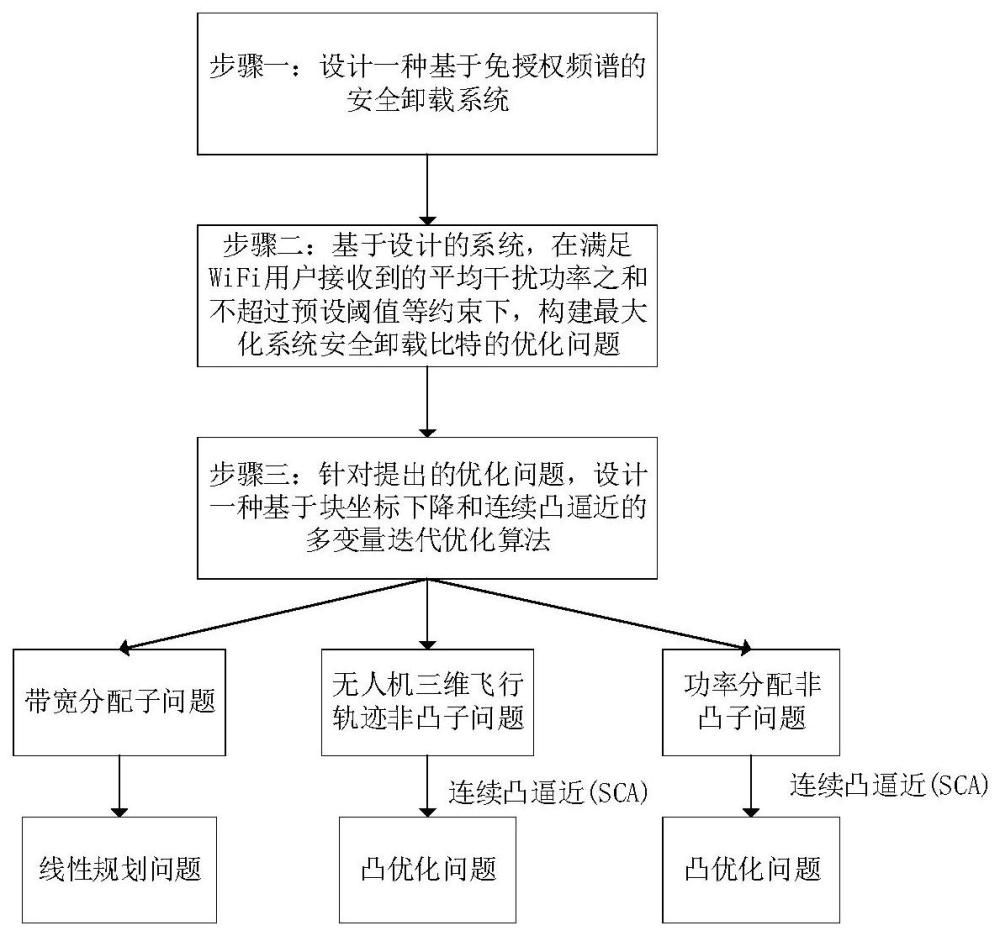
1、有鉴于此,本发明考虑到一个小范围的热点地区,设计一种新的基于免授权频谱的安全卸载方法。在满足wifi用户接收到的平均干扰功率之和不超过预设阈值等约束的前提下,联合考虑无人机三维飞行轨迹、带宽分配和功率分配,建立了系统安全卸载比特最大化的优化问题。为了解决提出的复杂优化问题,提出了一种基于块坐标下降和连续凸逼近的多变量迭代优化算法。本发明能够有效地提高系统内移动用户的安全卸载比特数,同时为了缓解授权频谱资源的短缺,将联合系统引入免授权频段,可以显著提高用户的频谱效率。因此,本发明的目的在于提供一种基于免授权频谱的安全卸载方法。
2、为达到上述目的,本发明提供如下技术方案:
3、一种基于免授权频谱的安全卸载方法,所述方法包括:
4、如图1所示,在一个小范围的热点地区,移动用户有计算任务需要卸载。移动用户选择部分卸载模式,即计算任务一部分在本地进行计算,其余卸载到无人机uavr携带的mec服务器进行计算。空中窃听无人机uave可以对卸载到无人机uavr的任务进行窃听。wifi用户使用wifi网络进行数据传输。本发明考虑一个存在空中窃听的在免授权频谱中运行的多用户无人机mec安全系统。该系统包含一个无人机uavr携带的空中mec服务器、一个wifi ap、m个与wifi ap关联的wifi用户、具有计算密集型任务的k个移动用户、一架空中窃听无人机uave以及一个地面干扰器组成。
5、将无人机的任务执行周期t作为飞行周期,每个飞行周期划分为n个时隙,每个时隙的长度为免授权频谱的带宽为b。在每个时隙当中通过fdma的方式为每个移动用户分配带宽。移动用户k在时隙n中分配到的带宽为bk[n],应满足以下约束:
6、
7、
8、用三维笛卡尔坐标系表示移动用户、wifi用户、地面干扰器、窃听无人机uave和携带mec服务器的无人机uavr的位置。假设每个移动用户的位置是固定的,移动用户k的水平坐标表示为qk=(xk,yk)。假设wifi用户的位置也是固定的,wifi用户m的水平坐标表示为qm=(xm,ym)。假设地面干扰器的水平坐标为qj=(xj,yj)。假设无人机的位置在每个时隙内也都是固定不变的,携带mec服务器的无人机uavr在时隙n的水平坐标表示为qr[n]=(xr[n],yr[n]),高度为h[n]。假设无人机uavr的最大水平飞行速度为vx,max,最大垂直飞行速度为vz,max。为了确保移动用户和无人机uavr之间可以构建los通信链路,无人机uavr的最小飞行高度为hmin,最大飞行高度为hmax。假设无人机uavr的初始位置为无人机uavr的最终位置为窃听无人机uave在时隙n的水平坐标表示为qe[n]=(xe[n],ye[n]),高度固定为h。窃听无人机uave的初始位置为窃听无人机uave的最终位置为假设窃听无人机uave在飞行周期t内沿直线匀速飞行,从初始位置飞到最终位置。同时为了避免uavr和uave发生碰撞,他们之间的最小碰撞避免距离为dmin。因此uavr和uave应满足以下约束:
9、
10、
11、
12、
13、
14、
15、假设无人机uavr和无人机uave与移动用户之间为los通信链路,无人机uavr和无人机uave与干扰器之间也为los通信链路。则在时隙n当中,移动用户k到无人机uavr和无人机uave的信道增益以及干扰器到无人机uavr和无人机uave的信道增益分别表示为:
16、
17、
18、
19、
20、上式中,β0是参考距离1m处的信道增益。
21、移动用户与wifi用户之间以及干扰器与wifi用户之间的地对地通信链路均被建模为独立的瑞利衰落模型,则移动用户k到wifi用户m的信道功率增益以及干扰器到wifi用户m的信道功率增益分别表示为:
22、
23、
24、其中β0是参考距离1m处的信道增益,表示路径损耗指数,ζkm和ζjm表示零均值指数分布的瑞利衰落系数。
25、移动用户k在时隙n向无人机uavr卸载任务时的发射功率为pk[n],移动用户的最大发射功率为pmax,地面干扰器的发射功率固定为pj。故应满足以下约束:
26、
27、假设wifi用户可以主动或者被要求向无人机通报wifi系统的状态,比如wifi用户的数量和位置。为了保证所有wifi用户的通信质量,需要保证每个wifi用户受到的平均干扰功率之和不超过阈值tr,故应满足以下约束:
28、
29、假设移动用户在每个时隙当中一直在进行本地计算。移动用户k在时隙n的本地计算能力为fk[n],移动用户的最大cpu频率为fmax。移动用户在本地计算一位数据所需的cpu周期数为cs。则移动用户k在时隙n的本地计算量表示为移动用户k的计算能力应满足以下约束:
30、
31、移动用户k在时隙n向无人机uavr卸载的任务量表示为:
32、
33、上式中σ2表示加性高斯白噪声的功率。假设无人机uavr所携带的mec服务器具有足够的计算能力,且mec的计算结果远小于卸载的计算任务,因此可以忽略无人机uavr的计算时间和计算结果下载时间。移动用户均有计算任务需要计算,为了满足移动用户的计算需求,需要满足以下约束:
34、
35、上式中lmin表示移动用户每秒所需处理的最低计算任务量。
36、无人机uave在时隙n窃听到移动用户k的任务量表示为:
37、
38、移动用户k在时隙n的安全卸载任务量表示为:
39、
40、上式中[x]+=max(x,0)。
41、在实际场景当中,无人机的能耗是限制无人机性能的关键因素之一。因此在本发明中考虑旋翼无人机uavr的三维推进能耗。旋翼无人机的推进能耗远大于旋翼无人机的通信能耗与计算能耗,因此忽略计算能耗与通信能耗,无人机uavr的三维推进能耗er表示为:
42、
43、上式中p0表示悬停状态下的桨叶轮廓功率,pi表示悬停状态下的桨叶感应功率,utip表示转子桨叶的叶尖速度,v[n]表示无人机的飞行速度,表示为(v[n])2=(vx[n])2+(vz[n])2。vx[n]表示无人机水平飞行速度,表示为vx[n]=||qr[n+1]-qr[n]||/ξ。vz[n]表示无人机垂直飞行速度,表示为vz[n]=||h[n+1]-h[n]||/ξ。v0表示悬停状态下平均旋翼诱导速度,d0代表机身阻力比,ρ表示空气密度,x表示转子坚固性,a表示转子盘面积,w表示无人机的重量。
44、emax表示无人机的最大能量,因此无人机的推进能耗应满足以下约束:
45、er≤emax (23)
46、进一步,考虑到建立的系统优化模型,本发明的优化目标是在满足wifi用户接收到的平均干扰功率之和不超过预设阈值等约束的前提下,联合考虑无人机飞行轨迹、带宽分配和功率分配,达到最大化系统安全卸载比特的目标。表示移动用户的通信带宽。表示无人机uavr的三维轨迹。表示移动用户卸载时的发射功率。该优化问题能够被表述为:
47、
48、s.t.(1),(2),(3),(4),(5),(6),(7),(8),(15),(16),(17),(19)和(23)
49、进一步,考虑到整个优化问题的求解,由于目标函数是非凹函数,且约束(8)、约束(19)和约束(23)中的变量耦合,原优化问题是一个多变量耦合的非凸优化问题,难以处理。为了能够有效地解决问题,本发明提出一种基于块坐标下降(block coordinate descent,bcd)和连续凸逼近(successive convex approximation,sca)的多变量迭代交替优化算法。首先将上述原问题分解为带宽分配、功率分配、无人机uavr三维飞行轨迹优化三个子问题。在优化每一个子问题的时候,固定其它子问题的优化变量,再使用连续凸逼近方法将其中的非凸子问题进行非凸转凸。通过迭代三个子问题并交替优化,最终满足精度,找到原问题的最终解。在本发明的三个子问题中,带宽分配是线性规划问题,因此可以直接使用凸优化工具cvx来解决。而无人机uavr三维飞行轨迹优化子问题和功率分配子问题是非凸的,先采用sca方法对其非凸转凸求近似,再使用凸优化工具cvx来解决。
50、进一步,对功率分配子问题进行求解。对于给定的带宽b和无人机三维飞行轨迹q,通过优化功率p实现系统安全卸载比特最大化。因此原问题改写为问题(p1):
51、
52、s.t.(15),(16)和(19).
53、由于此问题的目标函数不是凹函数,引入松弛变量xk[n]使其变为凹函数,xk[n]应满足以下约束:
54、
55、因此,问题(p1)转化为等价问题(p2)。
56、
57、s.t.(15),(16),(19)和(24).
58、在问题(p2)中,约束(24)是非凸约束。但不等式右侧关于pk[n]是凹函数,因此对不等式右侧进行一阶泰勒近似作为其上界假设给定第i次迭代的局部值为则表示为:
59、
60、则非凸约束(24)可以转化为:
61、
62、约束(26)为凸约束。因此,问题(p2)转化为问题(p3)。
63、
64、s.t.(15),(16),(19)和(26).
65、通过一系列转换,功率分配子问题(p1)被转化为一个标准的凸问题(p3),可直接使用matlab中的凸优化工具cvx来解决。
66、进一步,对无人机uavr三维飞行轨迹子问题进行求解。对于给定的带宽b和功率p,通过优化无人机uavr的三维飞行轨迹q实现系统安全卸载比特最大化。因此原问题改写为问题(p4):
67、
68、s.t.(3),(4),(5),(6),(7),(8),(19)和(23).
69、此问题的目标函数关于q是非凹的,且约束(8)、约束(19)和约束(23)是非凸约束,故问题(p4)是非凸非凹的优化问题。
70、首先引入非负松弛变量lk[n]将目标函数变为凹函数,lk[n]应满足以下约束:
71、
72、同时约束(19)转化为:
73、
74、因此,问题(p4)转化为等价问题(p5)。
75、
76、s.t.(3),(4),(5),(6),(7),(8),(23),(27)和(28).
77、在问题(p5)当中约束(8)、(23)和(27)是非凸约束。对于约束(8)来说,不等式的左侧关于q是凸函数。将其进行一阶泰勒近似作为其下界假设给定第i次迭代的局部值为和hi[n],则表示为:
78、
79、则非凸约束(8)可以转化为以下凸约束:
80、
81、对于约束(27)来说,不等式右侧关于q是非凸非凹函数。引入非负松弛变量tk1[n]和tk2[n],tk1[n]和tk2[n]应满足以下约束:
82、pk[n]β0/(||qr[n]-qk||2+h2[n])≥1/tk1[n] (31)
83、pjβ0/(||qr[n]-qj||2+h2[n])+σ2≤tk2[n] (32)
84、同时约束(27)转化为以下约束:
85、lk[n]≤ξbk[n]log2(1+1/tk1[n]tk2[n]) (33)
86、此时约束(27)被约束(31)、(32)和(33)所替代。约束(31)为凸约束,约束(32)和(33)为非凸约束。对于非凸约束(32),引入非负松弛变量drj[n],drj[n]应满足以下约束:
87、drj[n]≤||qr[n]-qj||2+h2[n] (34)则约束(32)转化为:
88、pjβ0/drj[n]+σ2≤tk2[n] (35)
89、此时约束(32)被约束(34)和(35)替代。约束(34)是非凸约束,但不等式右侧关于q是凸函数。将其进行一阶泰勒近似作为其下界dlb[n]。假设给定第i次迭代的局部值为和hi[n],则dlb[n]表示为:
90、
91、则非凸约束(34)可以转化为以下凸约束:
92、drj[n]≤dlb[n] (37)
93、此时约束(32)被凸约束(35)和(37)替代。对于非凸约束(33),不等式右侧关于tk1[n]和tk2[n]是凸函数。将其进行一阶泰勒近似作为其下界假设给定第i次迭代的局部值为和则表示为:
94、
95、则非凸约束(33)可以转化为以下凸约束:
96、
97、至此,非凸约束(27)被替代为凸约束(31)、(35)、(37)和(39)。
98、对于非凸约束(23),引入非负松弛变量s[n],s[n]应满足以下约束:
99、
100、约束(23)可以替换为约束(40)和(41),约束(41)表示为:
101、
102、约束(41)是凸约束,非凸约束(40)可以替换为约束(42):
103、
104、约束(42)是非凸约束,不等式右侧关于s[n]、vx[n]和vz[n]是凸的。将其进行一阶泰勒近似作为其下界o[n]。假设给定第i次迭代的局部值为si[n]、和则o[n]表示为:
105、
106、则非凸约束(42)转换为凸约束(44):
107、
108、至此,非凸约束(23)被替代为凸约束(41)和(44)。因此,问题(p5)转化为问题(p6)。
109、
110、s.t.(3),(4),(5),(6),(7),(28),(30),(31),(35),(37),(39),(41)和(44).
111、通过一系列转换,无人机三维轨迹优化的子问题(p4)被转化为一个标准的凸问题(p6),可直接使用matlab中的凸优化工具cvx来解决。
112、本发明的优点及有益效果
113、本发明的优点在于:目前关于无人机安全卸载的研究主要考虑了地面窃听者。考虑空中窃听者的研究很少,空中窃听者需要与携带mec服务器的无人机保持最小安全距离。大多数对无人机轨迹的优化研究只考虑二维场景,很少有研究将免授权频谱、移动边缘计算、安全问题以及无人机三维轨迹优化相结合。将无人机mec系统引入免授权频段,需要考虑系统与wifi网络之间的干扰。通过对移动用户的功率控制,可以使得wifi用户能量检测出的结果小于规定的阈值(csma/ca协议中的规定),即wifi用户可与移动用户共用免授权频段。
114、本发明的有益效果在于:本发明提供了一种基于免授权频谱的安全卸载方法。在满足wifi用户接收到的平均干扰功率之和不超过预设阈值等约束的前提下,联合考虑无人机飞行轨迹、带宽分配和功率分配,建立了系统安全卸载比特最大化的优化问题。为了解决提出的复杂优化问题,提出了一种基于块坐标下降和连续凸逼近的多变量迭代优化算法。本发明能够有效地提高系统内移动用户的安全卸载比特数,同时为了缓解授权频谱资源的短缺,将系统引入免授权频段,可以显著提高用户的频谱效率。
- 还没有人留言评论。精彩留言会获得点赞!