一种面向电网巡检的无人机任务卸载优化方法
本发明涉及移动边缘计算,具体涉及一种面向电网巡检的无人机任务卸载优化方法。
背景技术:
1、随着电力物联网技术的不断发展以及电力供应的持续增长,电网规模和电力系统的复杂性也在不断扩大和增加,电力系统的稳定运行和安全性成为社会经济发展的关键保障。然而,传统的电网巡检主要依靠人工巡视和定期维护,存在巡检周期长、效率低、成本高等问题。此外,电力设施分布广泛,有些地区环境恶劣,使得传统巡检方式难以满足实际需求。
2、近年来,无人机技术的快速发展为电网巡检带来了全新的解决方案。无人机具有机动性高、易于部署、拥有良好视距链路、对复杂环境适应能力强等特点,可以更加灵活地监测和巡视电力设施,覆盖范围更广、效率更高。同时,无人机结合机载相机、光电观测系统、红外热像、激光雷达等相关巡检传感器,可以避免巡检人员直接接触高压电力设施,减少了安全隐患。在无人机电网巡检中,由于其计算能力和电池容量的限制,通常将检查任务转移到中心云进行处理。对于计算密集型任务,中心云可以帮助性能受限的无人机处理这些运算需求大的任务,并返回计算结果,大大减少了无人机的计算压力。但是传统的云集中式计算模式中,中心云服务器与无人机之间的长距离会导致较大的数据传输延迟,可能不利于巡检人员及时获取故障信息,特别是对于延迟敏感的巡检任务。
3、移动边缘计算(mec)作为5g的关键技术之一,其主要特点是将数据处理和计算资源尽可能地靠近数据源和终端设备,减少数据传输延迟和网络拥堵。因此,mec有效地解决了传统集中式云的问题,通过在网络边缘提供计算资源(如基站、边缘服务器部署在基站旁边),可以将计算和数据存储功能靠近巡检现场,提供更低的延迟和更高的实时性。移动边缘计算技术的应用使无人机在电网巡检过程中能够实时获取数据、进行高效的数据处理和决策,从而提高巡检任务的准确性和效率。同时,边缘计算技术的应用保障了电网数据安全。
4、在无人机电网巡检过程中,mec可以很好地解决无人机电池容量和计算能力的受限问题。但是不合理的卸载策略会导致无人机电网巡检系统性能下降,能量消耗增加,任务执行效率低下,甚至可能影响系统的稳定性。因此,在设计无人机巡检系统时,需要结合任务需求、资源状况和通信环境等因素,合理地选择卸载策略,以最小化系统能耗和任务处理时延,从而优化系统性能和效率。
技术实现思路
1、发明目的:本发明的目的是提供一种面向电网巡检的无人机任务卸载优化方法通过动态调整任务卸载比例,系统在保证巡检任务准确性和时效性的前提下,根据具体的任务需求、无人机的资源状况以及通信环境信道状态等因素进行权衡和决策,最小化系统能耗和任务处理时延,提高无人机的巡检效率和性能。
2、技术方案:本发明所述的一种面向电网巡检的无人机任务卸载优化方法,由设置在固定位置的集成了mec服务器的多天线基站bs和n个单天线无人机组成,包括以下步骤:
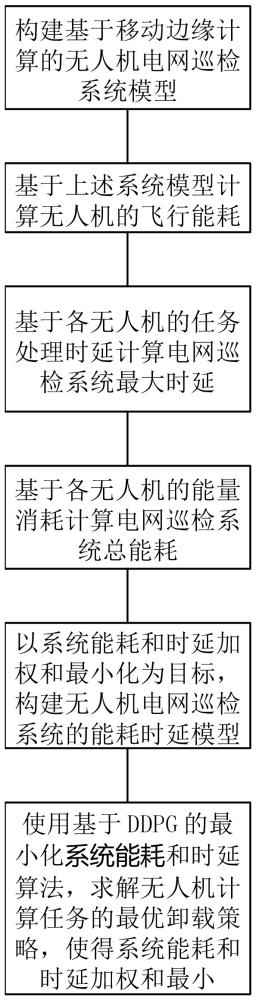
3、(1)基于bs的通信方式及各无人机的巡检模式,构建由mec服务器和无人机组成的电网巡检系统模型;
4、(2)基于巡检系统模型,计算第k个无人机在第i时隙用于执行巡检任务的飞行能耗;
5、(3)计算各无人机在第i时隙的任务处理时延;
6、(4)计算各无人机在第i时隙的能量消耗;
7、(5)基于任务处理时延和能量消耗,以系统能耗和时延的加权和最小化为目标函数:
8、(6)采用深度强化学习中的ddpg算法求解最优卸载策略,使无人机电网巡检系统能耗和时延加权和最小。
9、进一步的,所述步骤(1)包括以下步骤:
10、(11)以tdma方式将整个系统时间划分为长度为t的i个连续时隙,且在同一时隙内无线信道增益保持不变;
11、(12)在每个时隙中,所有无人机首先利用规定时间从巡检开始位置飞行到结束位置,然后在结束位置采用ofdm技术将部分任务卸载到mec服务器执行;其中在整个巡检过程中无人机始终保持在固定高度h飞行,且上一时隙的结束位置是下一时隙的开始位置。
12、进一步的,所述步骤(2)公式如下:
13、;
14、其中,表示第k个无人机在第i时隙中的飞行速度,设所有无人机的重量均为m。
15、进一步的,所述步骤(3)时延包括:无人机本地执行任务的计算时延、无人机向mec服务器传输任务数据时延和mec服务器计算时延,包括以下步骤:
16、(31)当无人机本地执行部分巡检计算任务时,计算时延依赖于无人机cpu的计算频率,则第k个无人机在第i时隙本地执行任务的计算时延公式如下:
17、;
18、其中,表示第k个无人机在第i时隙的计算任务数据量大小,表示第k个无人机在第i时隙卸载到mec服务器的任务比例,则表示第k个无人机在第i时隙本地执行的任务比例,s表示处理一个单位字节数据所需的cpu周期,设所有无人机的cpu计算频率均为;
19、(32)无人机向mec服务器传输剩余巡检计算任务的时延取决于无人机上行链路传输速率;公式如下:
20、设mec服务器的位置固定在,第k个无人机在第i时隙飞行巡检的结束位置为:
21、;
22、其中,与分别对应第k个无人机在第i-1时隙的横、纵坐标,表示第k个无人机在第i-1时隙的飞行角度,则第k个无人机在第i时隙与mec服务器之间的视距链路的信道增益为:
23、;
24、其中,表示参考距离为1m时的信道增益,表示第k个无人机在第i时隙与mec服务器之间的欧氏距离;由于障碍物堵塞,则第k个无人机在第i时隙的上行链路传输速率为:
25、;
26、其中,表示分配给每个无人机的信道带宽,设所有无人机的传输功率均为,表示噪声功率,表示传输损耗,表示第k个无人机在第i时隙与mec服务器之间是否存在堵塞即0表示无堵塞,1表示有堵塞;则第k个无人机在第i时隙向mec服务器传输任务数据时延公式如下:
27、;
28、其中,表示第k个无人机在第i时隙的计算任务数据量大小,表示第k个无人机在第i时隙卸载到mec服务器的任务比例,表示第k个无人机在第i时隙的上行链路传输速率;
29、(33)当无人机将剩余巡检任务卸载至mec服务器执行时,计算时延依赖于mec服务器的计算频率,则mec服务器在第i时隙为第k个无人机提供计算服务的计算时延公式如下:
30、;
31、其中,表示第k个无人机在第i时隙的计算任务数据量大小,表示第k个无人机在第i时隙卸载到mec服务器的任务比例,s表示处理一个单位字节数据所需的cpu周期,表示mec服务器的计算频率;
32、(34)由步骤(31)-(33)可得无人机电网巡检系统在第i时隙的任务处理最大时延为:
33、;
34、其中表示第k个无人机在第i时隙本地执行任务的计算时延,表示第k个无人机在第i时隙向mec服务器传输任务数据时延,表示mec服务器在第i时隙为第k个无人机提供计算服务的计算时延。
35、进一步的,所述步骤(4)能量消耗包括:无人机的飞行能耗、无人机本地执行任务的计算能耗和无人机将任务卸载至mec服务器的传输能耗;包括以下步骤:
36、(41)当无人机本地执行部分巡检计算任务时,计算能耗取决于芯片结构对无人机cpu处理的影响因子;由步骤(31)可得第k个无人机在第i时隙本地执行的计算能耗为:设所有无人机的芯片架构的能量系数均为,公式如下:
37、;
38、其中,表示无人机的cpu计算频率,表示第k个无人机在第i时隙本地执行的任务比例,表示第k个无人机在第i时隙的计算任务数据量大小;
39、(42)无人机向mec服务器传输剩余巡检计算任务能耗依赖于无人机传输功率及上行链路传输速率。由步骤(32)第k个无人机在第i时隙将任务卸载至mec服务器的传输能耗为:
40、;
41、其中,表示无人机的传输功率,表示第k个无人机在第i时隙的计算任务数据量大小,表示第k个无人机在第i时隙卸载到mec服务器的任务比例,表示第k个无人机在第i时隙的上行链路传输速率;
42、(43)由(2)和步骤(41)-(42)得到无人机电网巡检系统在第i时隙的能量消耗为:
43、;
44、其中,表示第k个无人机在第i时隙本地执行的计算能耗,表示第k个无人机在第i时隙将任务卸载至mec服务器的传输能耗,表示第k个无人机在第i时隙用于执行巡检任务的飞行能耗。
45、进一步的,所述步骤(5)具体如下:基于得到任务处理时延和能量消耗,以系统能耗和时延加权和最小化为目标函数,则无人机电网巡检系统的任务卸载比例策略优化问题建模为:
46、;
47、;
48、;
49、;
50、;
51、;
52、;
53、其中,表示时延权重参数,表示能耗权重参数,且,;对时延要求高的计算任务,增加时延权重参数;若uav电池处于低电量下则优先考虑能耗参数,即增加能耗权重参数;为计算任务的卸载比例值的范围,表示mec服务器与无人机的位置约束,表示无人机与mec服务器之间无线信道的堵塞约束,是确保无人机在所有时隙的飞行能耗、传输能耗及计算能耗不超过最大电池容量,表示在整个时间段中要完成的所有计算任务。
54、进一步的,其特征在于,所述步骤(6)包括以下步骤:
55、(61)在无人机电网巡检系统中,状态空间由n个无人机及其环境决定,则每i时隙的系统状态定义为:
56、;
57、其中,表示在整个时间段中需要完成的总剩余计算任务大小,表示mec服务器的位置信息,表示第n个无人机在第i时隙的剩余电量,表示第n个无人机在第i时隙的位置信息,表示第n个无人机在第i时隙的巡检计算任务大小,表示第n个无人机在第i时隙中与mec服务器之间无线信道是否堵塞;
58、基于第i时隙系统状态及每个无人机的任务卸载率,则第i时隙的系统卸载决策动作为:
59、;
60、其中,表示第n个无人机在第i时隙的任务卸载比例;
61、(62)基于第t时隙的状态空间和动作空间,采用深度强化学习中的ddpg算法求解满足所述目标函数的无人机计算任务的最优卸载策略,使得无人机电网巡检系统能耗和时延加权和最小。
62、本发明所述的一种设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述计算机程序被加载至处理器时实现任一项所述的一种面向电网巡检的无人机任务卸载优化方法。
63、本发明所述的一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现任一项所述的一种面向电网巡检的无人机任务卸载优化方法。
64、有益效果:与现有技术相比,本发明具有如下显著优点:利用无人机执行电网巡检任务,以最小化系统能耗和任务处理时延加权和为目标,使用一种深度强化学习方法优化无人机的卸载比例策略,提高巡检任务的效率和性能。设计了基于深度确定性策略梯度(ddpg)的最小化系统能耗和时延算法(ddpg-med)求解任务卸载比例策略,该方法结合了无人机巡检、移动边缘计算和深度强化学习技术,可以有效地支持任务卸载和无人机移动性的连续动作空间的优化问题,减少系统能耗和时延。同时该方法通过环境建模、智能体网络的训练和优化,能够在实时变化的环境中自主地调整无人机的卸载比例,以适应不同任务需求和通信环境,实现高效的无人机电网巡检。
- 还没有人留言评论。精彩留言会获得点赞!