基于离线指纹库-环境节点在线更新的LoRa定位方法及系统与流程
本发明属于智能定位,具体涉及一种基于离线指纹库-环境节点在线更新的lora定位方法及系统。
背景技术:
1、随着物联网的快速发展,lora(长距离低功耗射频)技术作为无线通信的一种重要标准,被广泛应用于各个领域。lora节点的位置追踪与定位技术,在实现物联网应用中起到了至关重要的作用。
2、电力作业安全是日常工作的根本与重点,为保障施工作业安全,避免走错间隔等安全事故,亟需对作业人员与作业装备进行亚米级定位。市场上主流lora定位方案的定位误差为50~200m(参考文献:l.e.marquez and m.calle,"understanding lora-basedlocalization:foundations and challenges,"in ieee internet of things journal,doi:10.1109/jiot.2023.3248860.),主要用于lora节点的小区级定位,远低于电力作业所需要的亚米级定位,更难以满足重点作业区域的分米级定位需求。变电站室内环境复杂,配电柜、变电设备等均为金属材质,存在严重的多径干扰,同时变电站内部涉及供电安全,需确保定位技术具备很高的安全性,而现有的室内定位技术难以在此环境下实现符合作业需求的定位精度与数据安全性。
技术实现思路
1、针对现有技术中存在的缺陷,本发明的目的在于提供一种基于离线指纹库-环境节点在线更新的lora定位方法及系统,能实现复杂室内环境下的亚米级定位,保障电力施工作业安全,避免走错间隔等安全事故。
2、为实现上述目的,本发明采用以下技术方案:
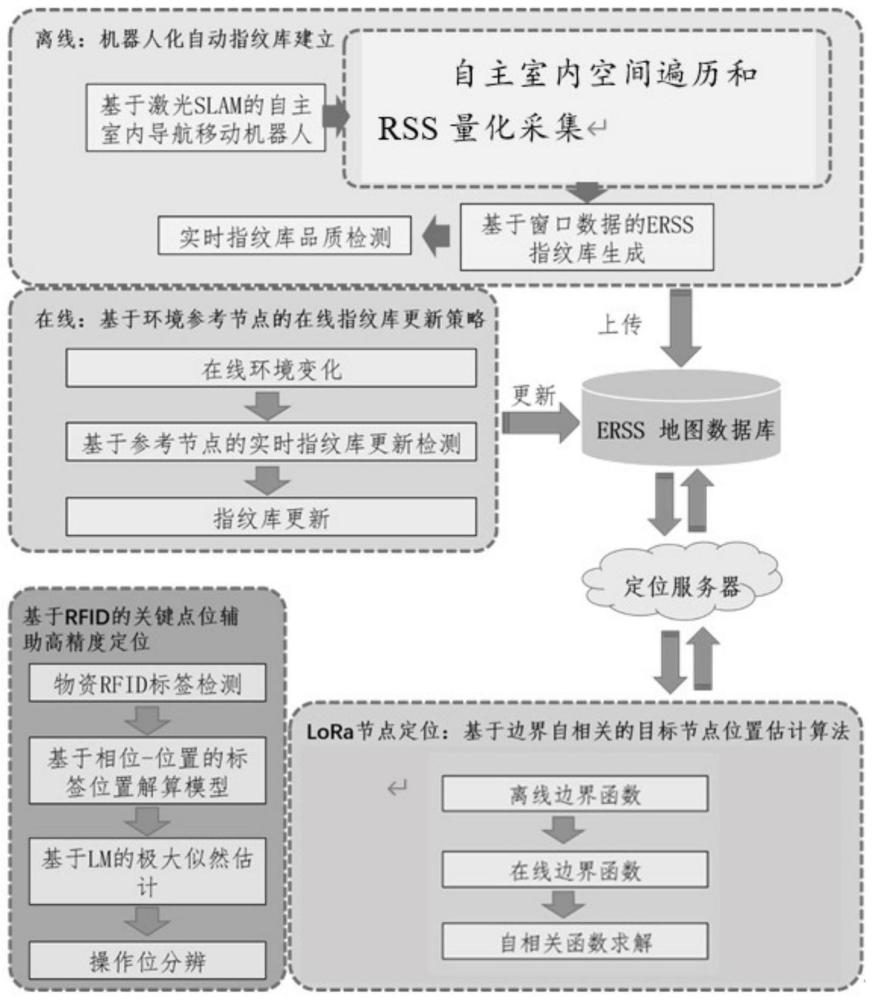
3、一种基于离线指纹库-环境节点在线更新的lora定位方法,包括以下步骤:
4、s1、遍历室内空间,完成rss量化采集,生成基于窗口数据的erss离线指纹库;
5、s2、采用基于环境参考节点的在线指纹库更新策略实时动态调整所述离线指纹库;
6、s3、基于边界自相关函数确定目标节点位置;
7、s4、针对关键操作点位,在步骤s3的定位结果基础上,利用rfid标签进行辅助高精度定位。
8、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位方法,步骤s1具体为:
9、采用基于激光slam技术的自主室内导航移动机器人进行自主室内空间遍历和rss量化采集;
10、生成基于窗口数据的erss离线指纹库,erss定义为每个时间窗口数据中的最大rss值和最小rss值,分别称为erssmax和erssmin。
11、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位方法,步骤s1中:
12、对所有rss值求平均值,将高于平均值的rss值定义为“强”状态,将低于平均值的rss值定义为“弱”状态;
13、设y为所有n个rss值都属于同一状态的事件,定义波动分析函数p(y)表示事件y发生的概率,p(y)表示为:
14、
15、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位方法,步骤s2具体为:
16、在环境参考节点布置参考标签,标定其位置,并在erss指纹库中记录参考标签的初始erss值;
17、将环境参考节点的rss测量值实时上传到定位服务器,在定位服务器中计算对应的erss值,并实时与环境参考节点的初始erss值对比;
18、当局部erss变化超过设定阈值时,则启动局部节点指纹库更新流程;当众多环境参考节点测量值变化超过设定阈值时,启动警报程序,提示技术人员对工程环境实际勘察。
19、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位方法,步骤s2中指纹库更新采用卡尔曼滤波算法和高斯平滑算法对局部lora节点测量值改变后的相邻位置指纹库结果进行平滑处理。
20、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位方法,步骤s3具体为:
21、s31、定义离线边界函数来描述第j个网关处第i个rp所获得的rss值,所述离线边界函数定义为:
22、
23、其中,x是指rss的连续变量,χij(x)是连续函数,表示离线站点调查时第j个网关处第i个rp得到的rss值的波动范围;
24、s32、定义在线边界函数来描述第j个网关处获得的rss值的波动范围,所述在线边界函数定义为:
25、
26、其中,和分别为在第j个网关处获得的rss窗口中的最小rss值和最大rss值;
27、s33、使用连续自相关函数计算所述离线边界函数和所述在线边界函数的自相关系数并归一化,来描述指纹库中第j个网关处测量的rss值与第j个网关处第i个rp处测量的rss值之间的相似性,连续自相关函数的表达式为:
28、
29、s34、通过计算第i个指纹库节点和测量节点之间的自相关系数之和确定搜索目标,位置估计方程表示为:
30、
31、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位方法,步骤s4具体为:
32、基于作业重点区域的约束,在设备上布置rfid天线;
33、读取所述rfid天线的rfid标签,采用rfid相位信号作为rfid定位基准。
34、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位方法,步骤s4中:用运动的rfid天线形成虚拟天线阵列,构成合成孔径,在合成孔径采样下,获取相位观测序列完成相位信息的采集;
35、其中,θ(i)为标签第i次被读取时所观测到的相位信息,为标签第i次被读取时rfid天线ai的空间位置信息。
36、为实现上述目的,本发明采用的另一种技术方案为:
37、一种基于离线指纹库-环境节点在线更新的lora定位系统,包括离线指纹库建立模块、在线指纹库更新模块、目标节点位置估算模块和关键点位辅助高精度定位模块,
38、所述离线指纹库建立模块用于遍历室内空间,完成rss量化采集,生成基于窗口数据的erss离线指纹库;
39、所述在线指纹库更新模块用于采用基于环境参考节点的在线指纹库更新策略实时动态调整所述erss离线指纹库;
40、所述目标节点位置估算模块用于基于边界自相关函数确定目标节点位置;
41、所述关键点位辅助高精度定位模块用于利用rfid标签实现关键操作点位的辅助高精度定位。
42、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位系统,所述离线指纹库建立模块包括数据采集单元和离线指纹库生成单元,
43、所述数据采集单元采用基于激光slam技术的自主室内导航移动机器人进行自主室内空间遍历和rss量化采集;
44、所述离线指纹库生成单元用于根据采集的rss信息,生成基于窗口数据的erss离线指纹库,所述erss离线指纹库定义每个时间窗口数据中的最大rss值和最小rss值,分别称为erssmax和erssmin。
45、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位系统,所述离线指纹库生成单元根据采集的rss信息,生成基于窗口数据的erss离线指纹库具体方法为:
46、对所有rss值求平均值,将高于平均值的rss值定义为“强”状态,将低于平均值的rss值定义为“弱”状态;
47、设y为所有n个rss值都属于同一状态的事件,定义波动分析函数p(y)表示事件y发生的概率,p(y)表示为:
48、
49、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位系统,所述在线指纹库更新模块包括多个环境参考节点和定位服务器,
50、所述环境参考节点上布置有参考标签,用于标定环境参考节点的位置,并在所述erss离线指纹库中记录所述参考标签的初始erss值;
51、所述定位服务器负责实时接收所述环境参考节点的rss测量值,计算对应的erss值,并实时与所述环境参考节点的初始erss值对比;
52、所述定位服务器还负责当局部环境参考节点的erss值变化超过设定阈值时,启动局部节点指纹库更新流程;当众多环境参考节点测量值变化超过设定阈值时启动警报程序,提示技术人员对工程环境实际勘察,以此保证所述系统的正常运行。
53、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位系统,所述局部节点指纹库更新具体为:所述定位服务器采用卡尔曼滤波算法和高斯平滑算法对局部lora节点测量值改变后的相邻位置指纹库结果进行平滑处理。
54、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位系统,所述目标节点位置估算模块基于边界自相关函数确定目标节点位置的方法具体为:
55、定义离线边界函数来描述第j个网关处第i个rp所获得的rss值,所述离线边界函数定义为:
56、
57、其中,x是指rss的连续变量,χij(x)是连续函数,表示离线站点调查时第j个网关处第i个rp得到的rss值的波动范围;
58、定义在线边界函数来描述第j个网关处获得的rss值的波动范围,所述在线边界函数定义为:
59、
60、其中,和分别为在第j个网关处获得的rss窗口中的最小rss值和最大rss值;
61、使用连续自相关函数计算所述离线边界函数和所述在线边界函数的自相关系数并归一化,来描述指纹库中第j个网关处测量的rss值与第j个网关处第i个rp处测量的rss值之间的相似性,连续自相关函数的表达式为:
62、
63、通过计算第i个指纹库节点和测量节点之间的自相关系数之和确定搜索目标,位置估计方程表示为:
64、
65、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位系统,所述关键点位辅助高精度定位模块包括多个rfid天线和高精度定位计算单元,
66、所述rfid天线是基于作业重点区域的约束而布置;
67、所述高精度定位计算单元负责读取所述rfid天线上的rfid标签,采用rfid相位信号作为rfid定位基准来计算关键点位的位置。
68、进一步,如上所述的基于离线指纹库-环境节点在线更新的lora定位系统,所述高精度定位计算单元负责采用运动的rfid天线形成虚拟天线阵列,构成合成孔径,在合成孔径采样下,获取相位观测序列完成相位信息的采集;
69、其中,θ(i)为标签第i次被读取时所观测到的相位信息,为标签第i次被读取时rfid天线ai的空间位置信息。
70、采用本发明提供的基于离线指纹库-环境节点在线更新的lora定位方法及系统,具有如下优点:
71、本发明使用erss来建立指纹库,具有更稳定的建图结果;采用基于环境参考节点的在线指纹库更新策略实时动态调整erss离线指纹库,提升了指纹库更新的精度和减少环境参考节点布置的数量;采用边界自相关函数确定目标节点位置,实现了复杂室内环境下的亚米级定位精度;同时针对变电柜等重点区域,在lora定位结果的基础上,基于作业重点区域的约束布置rfid天线,利用rfid标签来进行辅助高精度定位;用运动的rfid天线构成的虚拟天线阵列,构成合成孔径,实现了施工成本与定位精度间的平衡。
- 还没有人留言评论。精彩留言会获得点赞!