空间相关噪声下水声OFDM通信阵列信号合并方法
本发明属于水声通信,具体涉及一种空间相关噪声下水声ofdm(正交频分复用)通信阵列信号合并方法。
背景技术:
1、水声通信技术在水下传感器网络、海洋环境观测、海洋工程建设等领域得到了广泛的研究和应用。由于水声信道是多径明显、快时变的,并且水下噪声场是复杂多样的,所以实现稳定高速的水声通信是很有难度的。
2、在水声通信系统中,对于传统的siso(single input single output)水声通信系统,由于远距离传输带来的低信噪比问题使得水声通信解码变得极为困难,simo(singleinput multi output)水声通信系统很好地解决了这一问题。simo水声通信系统在接收端布置m元水听器阵列,通过信号合并可以带来10log10(m)分贝的阵列增益,极大地提升了水声信号的接收信噪比。simo水声通信系统在对接收到的阵列信号进行合并过程中通常假设各阵元接收信号的信道是互相独立的,噪声是不相关的。然而,在实测的海洋噪声场中各阵元间信道和噪声往往是具有空间相关性的。
3、公开号为cn116366170a的专利申请中提出了一种基于矢量水听器声压和振速通道间噪声相关的信号合并处理方法,利用ofdm信号的保护间隔估计通道间噪声的相关系数,但是该方法不适用于大规模水声阵列和快时变的水下噪声场。
4、公开号为cn102778676a的专利申请中提出了一种快变水声信道下的信号检测方法,该信号检测合并方法考虑了水声接收阵列的水声信道和噪声的快时变特征,考虑了相关信道的影响,但是并没有考虑噪声相关性带来的影响。
5、综上所述,由于现有方法对接收到的阵列信号进行合并时未考虑噪声相关性的影响,因此,提出一种新的阵列信号合并方法以进一步提高合并后信号的信噪比增益是十分必要的。
技术实现思路
1、本发明的目的是为了提高合并后信号的信噪比增益,而提出了一种空间相关噪声下水声ofdm通信阵列信号合并方法,通过考虑各阵元间的空间噪声相关性来合并信号,以获得更高的信噪比增益,实现远距离稳定的水声通信。
2、本发明为解决上述技术问题所采取的技术方案是:一种空间相关噪声下水声ofdm通信阵列信号合并方法,所述方法具体包括以下步骤:
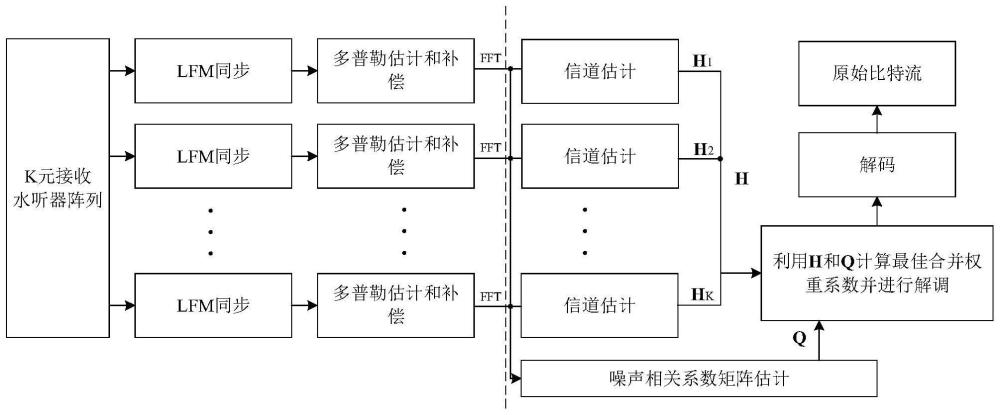
3、步骤一、对于发送端发送的ofdm信号中的任意一个符号e,利用由k个接收阵元组成的接收阵列来接收符号e;
4、分别对各个阵元接收到的信号进行处理后,得到各个阵元对应的处理后信号;再根据处理后的信号进行信道估计,分别得到每个阵元对应的信道参数;
5、步骤二、对于第m个数据子载波,将第k个阵元在第m个数据子载波上的信道参数记为hk[m],k=1,2,...,k;则第m个数据子载波上的信道参数向量为h[m],h[m]=[h1[m],h2[m],…,hk[m]]t,上角标t代表转置;
6、根据第m个数据子载波上不同阵元间噪声的协方差矩阵q[m]和信道参数向量h[m]构造信噪比,并计算使得信噪比取得最大值时的加权向量;
7、步骤三、利用步骤二计算出的加权向量,对第m个数据子载波上各个阵元的接收信号进行合并,得到合并后的接收信号;
8、再对合并后的接收信号进行解码,得到发送端发送的原始比特;
9、步骤四、对于发送端发送的ofdm信号中的每个符号,均执行步骤一至步骤三的过程,完成信号的接收。
10、进一步地,所述分别对各个阵元接收到的信号进行处理,具体为:
11、对于每个阵元接收到的信号,均进行lfm同步、下变频、多普勒估计与补偿、fft处理。
12、进一步地,所述信噪比γ(w)为:
13、
14、其中,e[·]表示期望,var[·]表示方差,|x[m]|2=|w[m]th[m]|2,w[m]为第m个子载波上的加权向量,w[m]=[w1[m],w2[m]…wk[m]]t,wk[m]是第k个阵元在第m个数据子载波上的复加权因子,var[n[m]]=w[m]tq[m]w[m]*,[·]*表示共轭计算;
15、将子载波序号[m]省略,即将w[m]简记为w,将h[m]简记为h,将q[m]简记为q,则重新将信噪比记为γoc(w):
16、
17、将q对角化为d-1qd=a,其中,a是一个k×k的对角矩阵,有ah=a,[·]h表示共轭转置计算,矩阵a的第k个对角线元素为q的第k个特征值,d是由q的特征向量组成的酉阵,有dh=d-1;
18、令p=dh,则有q=phλ2p,其中,ph=p-1,a=λ2且λh=λ;
19、则将式(2)的分母写为:
20、
21、其中,||·||2是2范数;
22、定义式(4):
23、[(λp*)t]-1=(phλt)-1=(p-1λ)-1=λ-1p (4)
24、其中,上角标-1代表矩阵的逆;
25、则将式(2)的分子写为:
26、wth=wt(λp*)t·[(λp*)t]-1h=wtphλ·v-1ph=(λpw*)h(λ-1ph) (5)。
27、进一步地,所述计算使得信噪比取得最大值时的权重向量;具体为:
28、步骤二一、由柯西-许瓦兹不等式得:
29、
30、当且仅当满足式(7)时,式(6)的等号成立:
31、λpw*=λ-1ph (7)
32、即满足式(7)时,γoc(w)取得最大值,得到信噪比增益γoc(w)max:
33、
34、步骤二二、对式(7)中的加权向量进行求解得:
35、w*=(λp)-1λ-1ph (9)
36、则信噪比取得最大值时的加权向量w为:
37、w=(phλ-2p)*h*=(q*)-1h* (10)。
38、进一步地,所述协方差矩阵q的计算方法为:
39、nl[m′]nk[m′]*=yl[m′]yk[m′]* (11)
40、其中,nk[m′]是第k个阵元在第m′个空子载波上的噪声信号,nl[m′]是第l个阵元在第m′个空子载波上的噪声信号,yk[m′]是第m′个空子载波上第k个阵元分支的输出信号,yl[m′]是第m′个空子载波上第l个阵元分支的输出信号;
41、则第k个阵元分支和第l个阵元分支的噪声协方差qkl为:
42、
43、其中,m是每个ofdm符号包含的空子载波个数;
44、则协方差矩阵q为:
45、
46、进一步地,所述第m′个空子载波上第k个阵元分支的输出信号为:
47、yk[m′]=hk[m′]s[m′]+nk[m′],k∈1,2,…,k (14)
48、其中,s[m′]是第m′个空子载波上调制的符号,hk[m′]是第k个阵元在第m′个空子载波上的信道参数。
49、更进一步地,所述第m′个空子载波上第l个阵元分支的输出信号为:
50、yl[m′]=hl[m′]s[m′]+nl[m′],l∈1,2,…,k (15)
51、其中,hl[m′]是第l个阵元在第m′个空子载波上的信道参数。
52、本发明的有益效果是:
53、1.本发明提出的水声ofdm系统阵列信号合并方法基于阵列间空间噪声存在相关性假设,基于最大平均信噪比准则,推导出各阵元信号的加权合并方法,符合实际海洋噪声场的情况,更具有应用价值;
54、2.本发明提出的空间噪声相关系数矩阵估计方法对每个ofdm符号内的空间噪声相关系数矩阵的估计精度极高,适用于快时变的海洋噪声场;
55、3.阵列中各阵元间存在空间噪声相关性时,与传统最优的mrc合并方法相比,本发明提出的合并方法在不提高接收机复杂度的情况下提高了接收信噪比增益,大大降低了通信系统的误码率(ber)。
- 还没有人留言评论。精彩留言会获得点赞!