一种自动迫击炮协调臂前装填装置及其装填方法
1.本发明属于武器火炮技术领域,具体涉及一种自动迫击炮协调臂前装填装置及其装填方法。
背景技术:
2.迫击炮是一种支援和伴随步兵作战的重要火炮武器,其具有弹道特别弯曲、结构简单、操作简便、易于变装药等特点,在城市、丘陵、山地等复杂地形的作战中有着其他种类火炮不可替代的地位。但同时,传统的人工操作的迫击炮也存在有机动困难、操作人员多、对机动目标反应速度慢等缺点,尤其是传统中小口径迫击炮的取弹、装填等动作均依靠人力,极大影响了迫击炮自动化程度和作战效能。
技术实现要素:
3.为了克服现有技术的不足,本发明提出一种结构简单、可靠性好、可在迫击炮任意射击角度进行装填的自动迫击炮协调臂前装填装置及其装填方法。
4.实现本发明目的的技术解决方案为:
5.一种自动迫击炮协调臂前装填装置,包括协调臂、抱弹筒、操纵板、连接机构、动力系统,
6.所述协调臂的前端与抱弹筒连接、后端与连接机构的前端转动连接,所述抱弹筒包括用于容纳弹丸的筒体,所述协调臂的后端的末端设置有操纵器,所述操纵板固定于迫击炮摇架上,所述连接机构的后端与动力系统连接,所述动力系统能够驱动所述连接机构旋转,从而带动协调臂上升,在协调臂上升的过程中所述操纵器会与所述操纵板接触使得协调臂围绕自身旋转,当所述筒体转至与身管同轴时,弹丸滑入身管完成装填。
7.进一步地,所述抱弹筒还包括挡弹板、挡杆、弹簧和推环,所述筒体与协调臂的前端相连接,挡弹板通过转轴和扭簧连接在筒体尾端进弹口处,推环与弹簧安装在筒体内,推环与挡杆相连接,并能够相对筒体前后运动,所述弹丸能够自筒体尾端进弹口处进入筒体,弹丸全部进入筒体后弹丸头部将弹簧压缩。
8.进一步地,所述协调臂还包括轴臂和轴承,所述操纵器安装于所述轴臂的末端处,所述轴承安装于轴臂上靠近操纵器的一端处,所述轴承位于连接机构的前端内,所述轴臂的前端与所述筒体固定连接。
9.进一步地,所述操纵器为一块状体,所述操纵板与所述操纵器接触的面为一曲面,所操纵器在上升的过程中自与所述操纵器接触开始能够转动
°
。
10.进一步地,所述操纵器与所述操纵板接触的面为一曲面。
11.进一步地,所述动力系统设置于迫击炮摇架外侧,包括步进电机、与步进电机输出端相连的减速器、连接于减速器输出端的小齿轮、与小齿轮啮合的大齿轮,所述连接机构的后端与所述大齿轮固定连接。
12.进一步地,所述连接机构包括协调臂轴室、端盖、内连接板和外连接板,其中内连
接板和外连接板一端与大齿轮相连、另一端与协调臂轴室连接,所述轴承位于所述协调臂轴室内,所述操纵器位于所述协调臂轴室外。
13.根据上述的自动迫击炮协调臂前装填装置的装填方法,包括以下步骤:
14.步骤一,当装填开始时,弹丸被推入抱弹筒筒体,此时,挡弹板处于打开状态,同时推环与挡杆处在初始位置且挡杆与挡弹板接触,阻止挡弹板关闭,推环与弹丸接触后一同向前运动并压缩弹簧,同时挡杆随推环一同移动,当挡杆与挡弹板完全脱离接触时,挡弹板在扭簧扭力作用下关闭抱弹筒筒体的进弹口,即进入工作位置,阻止弹丸滑出;
15.步骤二,当挡弹板完全进入工作位置后,动力系统开始工作,步进电机转动,通过减速器、小齿轮和大齿轮传动,带动连接机构、协调臂、抱弹筒开始抬升,当协调臂抬升一定角度后,操纵器与操纵板开始接触,带动协调臂、抱弹筒绕协调臂轴线转动,并最终转过
°
,抱弹筒筒体内弹丸轴线与炮身轴线对准,完成对中,在对中过程中,挡弹板与炮身外壁接触并被逐步推开,弹丸在自身重力和弹簧压缩力的作用下滑入身管,同时推环和挡杆也在自身重力和弹簧压缩力力作用下运动,最终使推环和挡杆回到初始位置,使挡杆与挡弹板接触,阻止挡弹板关闭;
16.步骤三,动力系统中的步进电机反转,带动连接机构、协调臂、抱弹筒远离炮身轴线返回受弹位置,所述返回过程中,协调臂和抱弹筒整体反向转过
°
,使抱弹筒筒体回到装填开始时的位置,完成一个装填周期。
17.进一步地,所述步骤三中抱弹筒远离炮身轴线这一动作要在弹丸击发前完成。
18.本发明与现有技术相比,其显著优点在于:
19.1、可实现迫击炮自动前装填:射击过程中装填炮弹可以自动完成,不需要人力参与;
20.2、装填效率高:自动装填不会像人力装填随着装填次数增加体力下降而变慢,而且装填速度可以比人工装填更快;
21.3、可靠性、安全性高:自动装填可以避免人工装填中由于操作不当而引起各种事故,有效保护了人员安全。
附图说明
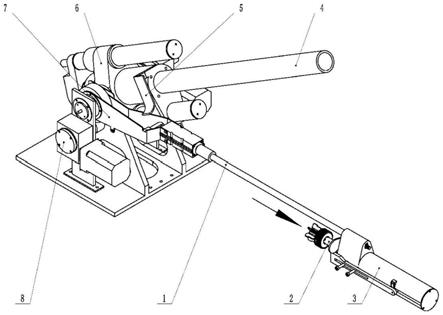
22.图1为处于装填起始位置的迫击炮协调臂前装填装置立体图。
23.图2为进行对中过程中的迫击炮协调臂前装填装置立体图。
24.图3为对中完成、弹丸进入身管时的迫击炮协调臂前装填装置立体图。
25.图4为弹丸进入或滑出抱弹筒过程中抱弹筒的立体图。
26.图5为弹丸被完全进入抱弹筒后抱弹筒的立体图。
27.图6为弹丸被完全进入抱弹筒后抱弹筒的剖面图。
28.图7为连接机构的立体图。
29.图8为协调臂的立体图。
30.图9为动力系统的立体图。
31.图10为操纵器上升过程一状态图。
32.图11为操纵器上升过程二状态图。
33.图12为操纵器上升过程三状态图。
具体实施方式
34.下面结合附图对本发明的具体实施作进一步描述。
35.如图1
–
9所示,一种迫击炮自动前装填装置,包括协调臂1、抱弹筒3、操纵板5、连接机构7、动力系统8。结合图8,所述协调臂1包括操纵器11、轴臂12、一对安装于轴臂12上的轴承13,操纵器11与操纵板5在一定时机接触并与轴臂12一同转动;结合图4-6,所述抱弹筒3主要包括挡弹板31、筒体32、挡杆33、弹簧34、推环35,筒体32用于容纳弹丸2,并通过键与轴臂12相连接,挡弹板31通过转轴36和扭簧37连接在筒体32尾端,推环35与弹簧34容纳于筒体32内,通过筒体32上的导槽前后运动,挡杆33与推环35相连接,通过和挡弹板31的接触控制挡弹板31能否开合;所述操纵板5固定于迫击炮摇架6上;结合图7,所述连接机构7包括轴室71、端盖72、内连接板73、外连接板74,内连接板73、外连接板74一端与动力系统8的齿轮组大齿轮85相连,轴室71与协调臂1通过轴承13配合形成转动副;结合图9,所述动力系统8包括步进电机81、与步进电机输出端相连的减速器82、与减速器输出端相连的齿轮组小齿轮84、与连接机构7相连的齿轮组大齿轮85,整体设置于迫击炮上架外侧,依靠电机安装板83固定。
36.进一步地,所述减速器82为闭式蜗轮蜗杆减速器或其他类型大传动比减速器。
37.进一步地,所述齿轮组小齿轮84与齿轮组大齿轮85组成开式一级减速齿轮组。
38.进一步地,所述轴承13为深沟球轴承或角接触球轴承中的一种。
39.本装置装填步骤如下:
40.步骤一,当装填开始时,弹丸2开始被推入筒体32,此时,挡弹板31处于打开状态,同时推环35与挡杆33处在初始位置且挡杆33与挡弹板31接触,阻止挡弹板31关闭,推环35与弹丸2接触后一同向前运动并压缩弹簧34,同时挡杆33随推环35一同移动,当挡杆33与挡弹板31完全脱离接触时,挡弹板31在扭簧扭力作用下关闭抱弹筒筒体32的进弹口,即进入工作位置,阻止弹丸2滑出;
41.步骤二,当挡弹板31完全进入工作位置后,动力系统8开始工作,步进电机81转动,通过减速器82、齿轮组小齿轮84和齿轮组大齿轮85传动,带动连接机构7、协调臂1、抱弹筒3开始抬升,当协调臂1抬升接近炮身4轴线至一定角度后,操纵器11与操纵板5开始接触(如图10所示),带动协调臂1、抱弹筒3绕协调臂1轴线转动(如图11所示),并最终转过90
°
(如图12所示),抱弹筒筒体32内弹丸2轴线与炮身4轴线对准,完成对中,在对中过程中,挡弹板31与炮身4外壁接触被推开,弹丸2在自身重力和弹簧34压缩力的作用下滑入身管4,同时推环35和挡杆33也在自身重力和弹簧34压缩力力作用下运动,最终使推环35和挡杆33回到初始位置,使挡杆33与挡弹板31接触,阻止挡弹板31关闭;
42.步骤三,动力系统8中的步进电机81反转,带动连接机构7、协调臂1、抱弹筒3远离炮身4轴线返回受弹位置,即0
°
位置,所述返回过程中,协调臂1和抱弹筒3整体反向转过90
°
,使抱弹筒筒体32的容弹孔对准接弹位置,完成一个装填周期。
43.进一步地,所述步骤四中抱弹筒3远离炮身4轴线这一动作要在弹丸击发前完成,以减小炮口焰和炮口超压对抱弹筒3的损伤。
44.以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进
都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1