一种伽马源存放库的制作方法
1.本技术涉及放射性源储存的领域,尤其是涉及一种伽马源存放库。
背景技术:
2.辐射加工需要利用伽马射线和加速器产生的电子束辐照被加工物体,伽马射线的产生需要用到伽马射线源,伽马射线源需要储存在伽马源源室中。
3.相关技术中,授权公告号为cn212434267u的中国实用新型专利公开了一种放射性源库,其包括第一箱体和设置于第一箱体内的第二箱体,第二箱体内至少包括一个源室,源室侧壁设置有源室门,源室和第二箱体之间设置有中子屏蔽层和伽马射线屏蔽层。第一箱体用于提供运输条件,第二箱体用于储存放射性源。中子屏蔽层用于屏蔽中子辐射,伽马射线屏蔽层用于屏蔽伽马射线辐射。伽马源从源室中运送出的方向为源室长度方向。
4.针对上述中的相关技术,发明人认为源室高度设置不合理,工作人员从源室中拿取及运送伽马源时需要采用半蹲姿势,从而给工作人员运送伽马源造成极大不便。
技术实现要素:
5.为了解决工作人员从源室中拿取及运送伽马源不便的问题,本技术提供一种伽马源存放库。
6.本技术提供的一种伽马源存放库采用如下的技术方案:
7.一种伽马源存放库,包括源室,所述源室一侧设置有用于控制源室启闭的源室门,所述源室内水平设置有存放机构,所述存放机构包括用于存放伽马源的底板,所述底板沿源室长度方向进行滑移,所述底板下方设置有驱动底板滑移的驱动机构,所述驱动机构上设置有带动驱动机构运行的转向机构。
8.通过采用上述技术方案,打开源室门,旋转转向机构,转向机构带动驱动机构滑动,驱动机构驱动底板沿源室长度方向向靠近源室门一侧滑移,底板将伽马源运送出源室,伽马源被拿取后,反向旋转转向机构,转向机构带动驱动机构滑动,驱动机构驱动底板沿源室长度方向向远离源室门一侧滑移,底板回到源室内,关闭源室门,从而完成对伽马源从源室内到源室外的转移,解决了工作人员从源室中拿取伽马源时需要采用半蹲姿势的问题,操作方便快捷。
9.可选的,所述底板上表面固定连接有限位组件,伽马源放置于限位组件内。
10.通过采用上述技术方案,底板在沿源室长度方向滑移过程中,限位组件在很大程度上减少了伽马源从底板上掉落的可能性,提高了在运送伽马源过程中伽马源放置的稳定性。
11.可选的,源室侧壁设置有导向组件,所述导向组件包括水平固定连接于源室侧壁上的导向杆,所述导向杆长度方向与源室长度方向平行,所述限位组件靠近导向杆一侧沿导向杆长度方向开设有导向槽,所述导向杆滑动连接于导向槽内。
12.通过采用上述技术方案,底板沿源室长度方向滑移时,源室侧壁上的导向杆在限
位组件上的导向槽内滑动,对底板滑移起到导向作用,提高了底板沿滑移方向上的运动稳定性。
13.可选的,所述驱动机构包括转动连接于底板下表面的传动杆,所述传动杆轴向与底板滑移方向平行,所述底板下表面固定连接有传动块,所述传动块与传动杆螺纹连接。
14.通过采用上述技术方案,传动杆旋转时,通过螺纹连接驱动固定在底板上的传动块沿源室长度方向滑动,传动块带动底板沿源室长度方向滑移,底板上放置有伽马源,从而实现了将伽马源从源室内运送到源室外。
15.可选的,所述转向机构包括第三转向组件,所述第三转向组件所在源室侧壁与源室门所在侧壁相邻,源室侧壁上设置有第二转向组件,所述第三转向组件带动第二转向组件运行,源室侧壁上设置有第一转向组件,所述第二转向组件带动第一转向组件运行,所述第三转向组件通过第二转向组件和第一转向组件带动传动杆转动。
16.通过采用上述技术方案,第三转向组件通过第二转向组件和第一转向组件带动传动杆转动,第三转向组件所在源室侧壁与源室门所在侧壁相邻,方便工作人员在源室门外对第三转向组件进行旋转,大大提高了工作人员运送伽马源的便捷性。
17.可选的,所述第一转向组件包括转动连接于源室侧壁的第一转向杆,所述第一转向杆水平设置,所述第一转向杆轴向与底板滑移方向垂直,所述第一转向杆靠近传动杆一端同轴固定连接有第二锥齿轮,所述传动杆靠近第一转向杆一端同轴固定连接第一锥齿轮,所述第一锥齿轮与第二锥齿轮啮合。
18.通过采用上述技术方案,第一转向杆旋转,带动同轴固定连接在第一转向杆上的第二锥齿轮转动,第二锥齿轮啮合有第一锥齿轮,第一锥齿轮带动同轴固定连接的传动杆旋转,传动杆驱动底板滑移,第一转向组件对传动杆运动起驱动作用。
19.可选的,所述第二转向组件包括转动连接于源室侧壁的第二转向杆,所述第二转向杆轴向与底板上表面垂直,所述第二转向杆靠近第一转向杆一端同轴固定连接有第四锥齿轮,所述第一转向杆远离传动杆一端同轴固定连接有第三锥齿轮,所述第三锥齿轮与第四锥齿轮啮合。
20.通过采用上述技术方案,第二转向杆旋转,带动同轴固定连接在第二转向杆上的第四锥齿轮转动,第四锥齿轮啮合有第三锥齿轮,第三锥齿轮带动同轴固定连接的第一转向杆旋转,第二转向组件对第一转向杆运动起驱动作用。
21.可选的,所述第三转向组件包括转动连接于源室侧壁的第三转向杆,所述第三转向杆轴向与底板滑移方向平行,所述第三转向杆靠近第二转向杆一端同轴固定连接有第六锥齿轮,所述第二转向杆远离第一转向杆一端同轴固定连接有第五锥齿轮,所述第五锥齿轮与第六锥齿轮啮合。
22.通过采用上述技术方案,第三转向杆旋转,带动同轴固定连接在第三转向杆上的第六锥齿轮转动,第六锥齿轮啮合有第五锥齿轮,第五锥齿轮带动同轴固定连接的第二转向杆旋转,第三转向组件对第二转向杆运动起驱动作用。
23.可选的,所述第三转向杆远离第二转向杆一端设置有伸缩组件,所述伸缩组件包括沿第三转向杆轴向滑移的滑杆,所述滑杆长度方向与第三转向杆轴向平行,所述滑杆转动带动第三转向杆转动。
24.通过采用上述技术方案,拉动滑杆,滑杆从第三转向杆内滑出,旋转滑杆带动第三
转向杆转动,伽马源从源室中运送出后,反向旋转滑杆,底板进入源室内,将滑杆推进第三转向杆内,从而完成滑杆的伸缩,方便工作人员在源室门外对转向机构进行操作,简单快捷。
25.可选的,所述滑杆为方杆,所述第三转向杆内沿第三转向杆轴向开设有方形滑槽,所述滑杆一端固定连接有第二限位块,所述第二限位块滑动连接于滑槽内,所述第二限位块侧壁与滑槽侧壁抵接,所述滑槽远离第二转向杆一端内壁固定连接有第一限位块,当第二限位块与第一限位块抵接时,所述滑杆停止滑移。
26.通过采用上述技术方案,当转动滑杆时,滑杆一端固定连接的第二限位块侧壁与第三转向杆内的滑槽侧壁抵接,从而驱动第三转向杆旋转,当滑杆上的第二限位块与第三转向杆一端的第一限位块抵接时,滑杆停止移动,从而保持滑杆在滑槽内滑动,提高了滑杆在滑槽内运动的稳定性。
27.综上所述,本技术包括以下至少一种有益技术效果:
28.1.打开源室门,旋转转向机构,转向机构带动驱动机构,驱动机构驱动底板沿源室长度方向向靠近源室门一侧滑移,底板将伽马源运送出源室,伽马源被拿取后,反向旋转转向机构,转向机构带动驱动机构,驱动机构驱动底板沿源室长度方向向远离源室门一侧滑移,底板回到源室内,关闭源室门,从而完成对伽马源从源室内到源室外的转移,解决了工作人员从源室中拿取伽马源时需要采用半蹲姿势的问题,操作方便快捷;
29.2.源室侧壁上的导向杆在限位组件上的导向槽内滑动,对底板滑移起到导向作用,提高了底板沿滑移方向上的运动稳定性;
30.3.传动杆旋转时,通过螺纹连接驱动固定在底板上的传动块沿源室长度方向滑动,传动块带动底板沿源室长度方向滑移,底板上放置有伽马源,从而实现了将伽马源从源室内运送到源室外。
附图说明
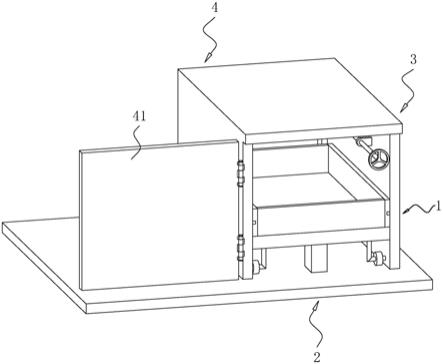
31.图1是本技术实施例整体结构示意图;
32.图2是本技术实施例部分结构示意图,主要用于展示存放机构;
33.图3是本技术实施例部分结构示意图,主要用于展示转向机构;
34.图4是本技术实施例部分结构剖视图,主要用于展示驱动机构;
35.图5是本技术实施例部分结构剖视图,主要用于展示伸缩组件;
36.图6是图5中a部分的局部放大图,主要用于展示伸缩组件。
37.附图标记说明:1、存放机构;11、底板;111、滚轮;12、限位组件;121、侧板;13、导向组件;131、导向杆;132、导向槽;2、驱动机构;21、传动块;211、螺纹通孔;22、传动杆;23、固定块;231、转向槽;3、转向机构;31、第一转向组件;311、第一支撑块;312、第一转向杆;313、第一锥齿轮;314、第二锥齿轮;32、第二转向组件;321、第二支撑块;322、第二转向杆;323、第三锥齿轮;324、第四锥齿轮;33、第三转向组件;331、第三支撑块;332、第三转向杆;333、第五锥齿轮;334、第六锥齿轮;34、伸缩组件;341、滑杆;342、滑槽;343、第一限位块;344、第二限位块;345、通孔;346、旋转把手;4、源室;41、源室门。
具体实施方式
38.以下结合附图1-6对本技术作进一步详细说明。
39.本技术实施例公开一种伽马源存放库。参照图1,一种伽马源存放库包括源室4,源室4内用于放置伽马射线源的存放机构1,存放机构1沿源室4长度方向滑出,存放机构1上设置有驱动机构2,源室4侧壁上设置有供工作人员操作的转向机构3,源室4侧壁设置有源室门41。
40.伽马射线源从源室4中取出时,打开源室门41,摇动转向机构3,转向机构3带动驱动机构2滑动,驱动机构2驱动存放机构1滑移出源室4,存放机构1上表面放置有伽马射线源,伽马射线源被运送出源室4,工作人员取下伽马射线源后,再次摇动转向机构3,转向机构3带动驱动机构2滑动,驱动机构2驱动存放机构1回到源室4中,关闭源室门41,从而将伽马射线源从源室4中运送出来。
41.参照图2,存放机构1包括水平滑动连接于源室4底壁上的底板11,底板11上设置有限位组件12,源室4两侧壁上水平设置有导向组件13。
42.参照图2,底板11为水平设置的长方体板,底板11长度方向与源室4长度方向平行,底板11沿源室4长度方向滑移。底板11下表面转动连接有四个滚轮111,四个滚轮111在底板11下表面周向设置且分布在底板11下表面四角。
43.参照图2,限位组件12包括竖直固定连接于底板11上表面的四块侧板121,相邻两块侧板121互相垂直,侧板121与相邻源室4侧壁平行。
44.参照图1和图2,导向组件13包括水平固定连接于源室4两侧壁上的方形导向杆131,导向杆131长度方向与底板11长度方向平行,导向杆131所在的源室4两侧壁与源室门41所在的源室4侧壁相邻,侧板121朝向导向杆131一侧沿导向杆131长度方向开设有导向槽132,导向杆131滑动连接于导向槽132内,导向杆131侧壁与导向槽132侧壁抵接。
45.当底板11被驱动机构2驱动时,滚轮111沿底板11长度方向向靠近源室门41的一侧转动,通过连接杆带动底板11向靠近源室门41的一侧移动,导向杆131在导向槽132内滑动,从而将底板11上的放射源从源室4中运送出来。
46.参照图3和图4,驱动机构2包括固定连接于底板11下表面的传动块21,传动块21沿底板11长度方向开设有螺纹通孔211,螺纹通孔211内同轴螺纹连接有传动杆22。源室4底壁固定连接有两块固定块23,传动杆22转动连接于固定块23上,两块固定块23沿传动杆22轴向间隔设置。
47.参照图1和图4,固定块23上开设有供传动杆22转动的转向槽231,靠近源室门41的固定块23上的转动槽一端未开通,远离源室门41的固定块23上的转动槽两端均开通。
48.转向机构3带动传动杆22旋转,传动杆22通过螺纹连接驱动传动块21在传动杆22上进行滑移,传动块21带动底板11沿底板11长度方向移动,从而将底板11上的伽马源进行运送。
49.参照图3,转向机构3包括水平设置的第一转向组件31、竖直设置的第二转向组件32和水平设置的第三转向组件33。第三转向组件33远离第二转向组件32一端设置有伸缩组件34。
50.参照图1和图3,第一转向组件31包括固定连接于源室4侧壁上的两块第一支撑块311,第一支撑块311所在的源室4侧壁与源室门41所在的源室4侧壁相对设置。第一支撑块
311上转动连接有第一转向杆312,第一转向杆312水平设置,第一转向杆312轴向与底板11长度方向垂直。第一转向杆312靠近传动杆22一端同轴固定连接有第一锥齿轮313,传动杆22靠近第一转向杆312一端同轴固定连接第二锥齿轮314,第一锥齿轮313与第二锥齿轮314啮合。
51.参照图1和图3,第二转向组件32包括固定连接于源室4侧壁上的两块第二支撑块321,第二支撑块321所在的源室4侧壁与源室门41所在的源室4侧壁相对设置。第二支撑块321上转动连接有第二转向杆322,第二转向杆322竖直设置,第二转向杆322轴向与底板11上表面垂直。第二转向杆322靠近第一转向杆312一端同轴固定连接有第四锥齿轮324,第一转向杆312远离传动杆22一端同轴固定连接有第三锥齿轮323,第三锥齿轮323与第四锥齿轮324啮合。
52.参照图1和图3,第三转向组件33包括固定连接于源室4侧壁上的两块第三支撑块331,第三支撑块331所在的源室4侧壁与源室门41所在的源室4侧壁相邻设置。第三支撑块331上转动连接有第三转向杆332,第三转向杆332水平设置,第三转向杆332轴向与底板11长度方向平行。第三转向杆332靠近第二转向杆322一端同轴固定连接有第六锥齿轮334,第二转向杆322远离第一转向杆312一端同轴固定连接有第五锥齿轮333,第五锥齿轮333与第六锥齿轮334啮合。
53.参照图5和图6,伸缩组件34包括方形滑杆341,滑杆341长度方向与第三转向杆332轴向平行,第三转向杆332远离第二转向杆322一端沿第三转向杆332轴向开设有方形滑槽342,滑杆341滑动连接于滑槽342内。滑杆341靠近第二转向杆322一端固定连接有方形第二限位块344,第二限位块344滑动连接于滑槽342内,第二限位块344侧壁与滑槽342侧壁抵接。滑槽342远离第二转向杆322一端内壁固定连接有第一限位块343,第一限位块343上开设有供滑杆341穿过的方形通孔345,滑杆341侧壁与通孔345内壁抵接。滑杆341远离第二限位块344一端固定连接有旋转把手346。
54.打开源室门41后,拉动旋转把手346,旋转把手346带动滑杆341在滑槽342内进行滑移,当第一限位块343朝向第二限位块344一侧与第二限位块344朝向第一限位块343一侧抵接时,滑杆341停止滑动,转动旋转把手346,旋转把手346带动第二限位块344转动,第二限位块344带动第三转向杆332转动,第三转向杆332带动第六锥齿轮334转动,第六锥齿轮334带动第五锥齿轮333转动,第五锥齿轮333带动第二转向杆322转动,第二转向杆322带动第四锥齿轮324转动,第四锥齿轮324带动第三锥齿轮323转动,第三锥齿轮323带动第一转向杆312转动,第一转向杆312带动第二锥齿轮314转动,第二锥齿轮314带动第一锥齿轮313转动,第一锥齿轮313带动传动杆22转动,从而驱动传动块21进行滑移,传动块21驱动底板11进行滑移。
55.本技术实施例一种伽马源源室4用伽马源运送装置的实施原理为:打开源室门41后,拉动旋转把手346,旋转把手346带动滑杆341在滑槽342内进行滑移,当第一限位块343朝向第二限位块344一侧与第二限位块344朝向第一限位块343一侧抵接时,滑杆341停止滑动,转动旋转把手346,旋转把手346带动第二限位块344转动,第二次限位块带动第三转向杆332转动,第三转向杆332带动第六锥齿轮334转动,第六锥齿轮334带动第五锥齿轮333转动,第五锥齿轮333带动第二转向杆322转动,第二转向杆322转动带动第四锥齿轮324转动,第四锥齿轮324带动第三锥齿轮323转动,第三锥齿轮323带动第一转向杆312转动,第一转
向杆312带动第二锥齿轮314转动,第二锥齿轮314带动第一锥齿轮313转动,第一锥齿轮313带动传动杆22转动,传动杆22驱动传动块21进行滑移,传动块21带动底板11沿源室4长度方向向靠近源室门41一侧滑移,底板11上放置有伽马源,从而将伽马源运送出源室4。
56.当伽马源被拿取后,反向转动旋转把手346,第三转向组件33带动第二转向组件32运动,第二转向组件32带动第一转向组件31运动,第一转向组件31带动传动杆22转动,传动杆22驱动底板11沿源室4长度方向向远离源室门41一侧滑移,当底板11滑动至底板11远离源室门41一端与源室4内侧壁抵接时,推动旋转把手346,滑杆341在滑槽342内向远离源室门41一端移动,当第二限位块344远离源室门41一侧与滑槽342远离源室门41一侧壁抵接时,关闭源室门41,从而完成对伽马源的运送。
57.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1