一种基于弱磁探测技术反无人机的起爆控制方法
1.本发明涉及目标探测和智能引信领域,具体设计一种基于弱磁探测技术反无人机的起爆控制方法。
背景技术:
2.常用的无人机探测技术包含雷达探测技术、光电/红外探测技术和无线电侦测技术等,它们都存在着不同的问题:雷达探测技术存在近距离盲区而难以探测“低慢小”的无人机问题;光电/红外探测技术存在着受环境和能见度影响较大的问题;而无线电侦测技术存在着对无线电环境要求较高的问题。因此上述方法都存在着实用性差的问题。
3.为了解决上述的问题,也有激光探测技术和传感器探测技术出现。但是对于起爆控制方法,一般要计算最佳起爆点,而弹丸是高速飞行的物体,利用上述方法在每一次探测数据之间都存在时间差,所以在弹目交会过程中,检测到距离最短时,实际上弹丸已经错过了最佳起爆点。另外,激光探测等方法仅能得到弹丸和目标物的直线距离,无法直接得到目标物的空间位置;如需探测到目标物的空间位置,需在弹丸上分布大量传感器用于探测不同方位的目标信息,使用信息融合、建模和设计算法来计算最佳起爆点,弹丸内部空间的限制使得传感器很难合理布局,同时信息融合算法和计算起爆点算法非常复杂。
技术实现要素:
4.本发明要提供一种基于弱磁探测技术反无人机的起爆控制方法,以克服现有技术存在的无法直接得到目标物的空间位置和传感器布局困难、算法复杂的问题。
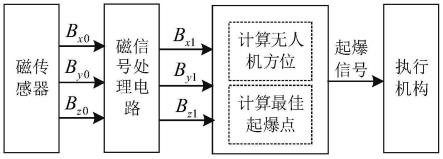
5.为达到本发明的目的,本发明提供一种基于弱磁探测技术反无人机的起爆控制方法,该方法是:使用磁传感器探测空间磁场信号,空间磁场信号经磁信号处理电路转换为三维磁场强度电信号;根据三维磁场强度电信号大小,使用阈值判断法,判断是否检测到无人机;当检测到无人机时,建立弹体坐标系,计算无人机空间方位;建立空间起爆模型,根据弹丸运动轨迹和无人机外围磁信号特征,计算最佳起爆点;当弹丸到达最佳起爆点时,输出起爆信号,毁伤无人机。
6.本发明是一种基于弱磁探测技术反无人机的起爆控制方法,其特征在于:
7.一、计算无人机的空间方位,包括如下步骤:
8.步骤1:首先采集三维磁场强度电信号,求取矢量和;
9.步骤2:使用阈值判断法,若矢量和结果小于设定阈值b
min
,则未检测到无人机,反之,则检测到无人机,弹体进入无人机感应磁场区域;
10.步骤3:以弹体质心为坐标原点,建立弹体坐标系的x轴、y轴、z轴;
11.步骤4:读取弹体坐标系中x轴、y轴、z轴三轴方向的磁场强度电信号大小分别为:b
x
,by,bz;根据无人机感应磁场区域内的位置和其磁信号强度的关系,得到无人机在弹体坐标系中的位置标系中的位置
12.步骤5:计算弹体和目标无人机的直线距离
13.二、计算最佳起爆点,包括如下步骤:
14.步骤1:建立起爆空间几何模型。
15.步骤2:在两个不同时刻分别测量三维感应磁场强度电信号,t1时刻三维磁信号强度电信号记为(b
xa
,b
ya
,b
za
);t2时刻三维磁信号强度电信号记为(b
xb
,b
yb
,b
zb
)。
16.步骤3:分别求取t1时刻和t2时刻两次磁场强度电信号的矢量和分别为:
17.步骤4:求取弹丸在两次测量点a和b分别距离无人机的距离a1和a2
[0018][0019]
步骤5:求取两个测量点之间的距离a3
[0020]
a3=δt*v
[0021]
弹丸的飞行速度记作v,两次采样的时间间隔记作δt;
[0022]
步骤6:根据数学关系,求得初次测量点距离最佳起爆点的距离为a1*cosα,其中,α是a1和a3的夹角,
[0023]
步骤7:计算从当前测量位置至最佳起爆点的距离l和到达最佳起爆点的时间t,根据几何关系得到l=a1*cosα-a3,t=l/v。
[0024]
上述磁场信号的采集使用三轴tmr磁传感器。
[0025]
与现有技术相比,本发明的优点如下:
[0026]
1、本发明提出了在弹载系统上使用弱磁探测技术探测无人机空间位置的方法。使用三轴tmr磁传感器测量空间磁场信号用于探测无人机,同时根据无人机外围磁场强度大小和距离之间的关系,求解无人机在弹丸坐标系中的空间位置和弹丸距离无人机的空间距离。
[0027]
2、本发明方法中,提出将弹体在无人机感应区域内的运动轨迹看作一条直线,连续测量两次磁信号大小,建立起爆空间几何模型,根据弹丸运动轨迹和无人机外围磁场特征,结合空间几何关系,计算最佳起爆点和起爆时间。该计算结果是在弹丸到达最佳起爆点之前就得到的,可看作是预估最佳起爆点,只需检测弹体是否到达该点或判断是否达到起爆时间即可引爆战斗部,而不会错过最佳起爆点。
[0028]
3、本发明彻底解决了复杂环境下无人机的探测问题:在大雾、浓烟、高浓度灰尘和存在无线电干扰等复杂环境下,本发明应用弱磁探测技术探测无人机,复杂环境不会对外围磁场产生影响,因此探测结果准确。
附图说明
[0029]
图1是本发明的完整流程图;
[0030]
图2计算目标无人机方位流程图;
[0031]
图3无人机感应磁场与空间距离关系图;
[0032]
图4计算目标无人机方位示意图;
[0033]
图5预估最佳起爆点流程图;
[0034]
图6起爆空间几何模型图。
具体实施方式
[0035]
下面结合本发明实施中的附图,对本发明实施例中的方案进行清楚、完整的描述,显然,所描述的实例仅仅是本发明的一部分实施,而不是全部的实施例。基于本发明中的实施例,本领域中的普通技术人员在没有做出创造性劳动前提下所获得的其他实施例,都属于本发明的保护范围。
[0036]
参见图1,本发明提出一种基于弱磁探测技术反无人机的起爆控制方法的设计原理是使用弱磁探测技术探测无人机。通过三轴磁传感器获取空间三维磁信号强度,进一步得到无人机的空间方位。建立空间起爆模型,计算最佳起爆点,进而得到探测点与最佳起爆点的距离以及最佳起爆时间。本发明实现无人机空间方位计算、预估最佳起爆点实现弹载起爆的问题。
[0037]
具体地说,该方法是使用磁传感器探测空间磁场信号,空间磁场信号经磁信号处理电路转换为三维磁场强度电信号;根据三维磁场强度电信号大小,使用阈值判断法,判断是否检测到无人机;当检测到无人机时,建立弹体坐标系,计算无人机空间方位;建立空间起爆模型,根据弹丸运动轨迹和无人机外围磁信号特征,计算最佳起爆点;当弹丸到达最佳起爆点时,输出起爆信号,达到毁伤无人机的目的。
[0038]
实施例1,一种基于弱磁探测技术反无人机的起爆控制方法,包括以下两个步骤:
[0039]
步骤一:计算无人机空间方位,包括下述具体步骤,参见图2,步骤1、采集三维磁场强度电信号,求取矢量和:
[0040]
首先采集三维磁场强度电信号,选用一个三轴tmr传感器,或者三个单轴的tmr磁传感器,构成传感器电路用于测量三轴的磁信号强度,经磁信号处理电路,转换为三维磁场强度电信号。若使用三个单轴的tmr磁传感器,则三个传感器摆放方位由测量的磁场方向决定,传感器的测量敏感方向与实测的磁场方向保持一致。传感器一般为惠斯通全桥提供差分电压输出,且幅值较小,多为毫伏级。所说的磁信号处理电路由放大模块、滤波模块和ad转换模块等常规模块组成。放大模块实现磁信号幅值的放大并将差分信号转换为单端信号输出;滤波模块采用有源滤波电路,构成低通滤波器,用于滤除杂波以及其他高频干扰信号;滤波器连接ad转换模块实现信号模拟量至数字量的转换。
[0041]
然后求取矢量和,参见图3,无人机的感应磁场主要由其旋翼电机在旋转时产生感应磁场决定,虽然在无人机内部,其空间磁场云图呈现花瓣状或者其他不规则形状。但是在无人机外场,距离无人机数十厘米以外的空间区域内,感应磁场强度大小呈现出探测点距离无人机越近,感应磁场强度越强的特点。这一区域可近似认为是一空间球形区域,在这一空间范围内,探测点和无人机之间的距离与磁感应强度呈现出反比关系。三轴的磁场强度信号分别反映了弹丸距离无人机在空间三轴的投影距离,三轴投影距离的矢量和,即为到弹丸距离无人机的空间距离。
[0042]
步骤2、参见图4,采用阈值判断法,判断无人机有无:
[0043]
阈值判断标准为:对三维磁场强度进行矢量求和计算,若计算结果小于设定阈值b
min
,则未检测到无人机,若计算结果大于等于设定阈值b
min
,则检测到无人机,弹体进入无
人机感应磁场区域。
[0044]
步骤3、以弹体质心为原点,建立弹体坐标系。
[0045]
设定弹体飞行方向,即弹体轴方向为x轴;y垂直于x轴,位于x轴的垂直面内,指向上方为正;z轴根据右手法则确定。
[0046]
步骤4、计算无人机在弹体坐标系中的位置:
[0047]
读取弹体坐标系中x轴、y轴、z轴三轴的磁场强度电信号大小分别为:b
x
,by,bz;设定弹丸和目标无人机的直线距离为r;r在x轴、y轴和z轴上的投影距离分别为x,y,z;根据无人机感应磁场区域内的位置和其磁信号强度的关系,得到无人机在弹丸坐标系中的位置式中,k
x
,ky,kz均为系数。
[0048]
步骤5、计算弹体和目标无人机的直线距离为r,
[0049]
步骤二、计算最佳起爆点,包括以下具体步骤,参见图5:
[0050]
步骤1:建立起爆空间几何模型,如图5所示,将弹丸在无人机感应区域内的运动轨迹看作一条直线,该运动轨迹上的c点即为最佳起爆点,c点为运动轨迹线距离无人机质点的最近点。
[0051]
步骤2:连续测量两次三维感应磁场强度电信号,图6中所示点a为t1时刻弹丸的位置,其三维磁信号强度记为(b
xa
,b
ya
,b
za
);图5中所示点b为t2时刻弹丸的位置,其三维磁信号强度记为(b
xb
,b
yb
,b
zb
)。
[0052]
步骤3:分别求取t1时刻和t2时刻两次磁信号测量的矢量和分别记作ba和bb,,
[0053]
步骤4:求取弹丸在两次测量点a和b分别距离无人机的距离a1和a2。
[0054]
步骤5:求取两个测量点之间的距离a3。弹丸的飞行速度记作v,两次采样的时间间隔记作δt,则a3=δt*v。
[0055]
步骤6:求取初次测量点a距离最佳起爆点的距离。a1、a2和a3构成一三角形,根据数学关系,求得a1和a3的夹角数学关系,求得a1和a3的夹角初次测量点a距离最佳起爆点的距离为:a1*cosα。
[0056]
步骤7:计算从当前测量位置至最佳起爆点的距离l和到达最佳起爆点的时间t。则l=a1*cosα-a3,t=l/v。即从前时刻开始计时,t时刻后弹丸到达最佳起爆点c应输出起爆信号,控制执行机构实现起爆任务,摧毁目标无人机。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1