一种重武器靶机直瞄射击训练的匹配方法及系统与流程
1.本发明属于射击训练设备技术领域,特别涉及一种远距离重武器靶机直瞄射击训练的高准确度匹配算法。
背景技术:
2.在合同战术训练中,重武器靶机作为装甲训练中最常接触到的训练装备,是一种射击距离较远(根据武器类型可达几公里甚至十几公里)、目标较为分散的一种靶机设备。主要用于模拟实际战场中的装甲车辆以不同速度、不同分队队形、不同战术形态等情况下的直瞄射击训练。训练过程中,战场场地广阔,靶机较为分散,并且在新式训练中,靶标多为运动型和固定型的结合,大多数情况下以编队形式出现,这就导致在训练过程中,火炮在自由射击时难以将射击结果与射击者相匹配,即无法实现将射击者的射击事件和靶标的命中事件的智能匹配,无法快速有效的完成成绩的输出。
3.现有系统主要是通过人员进行射击指挥,即通过人工的方式按照既定顺序将射击结果和装甲车辆相匹配,完成射击成绩的输出,效率较低且影响演训的进度,无法满足在复杂战术演训过程中,自由射击后的自主智能匹配,无法有效的评估战士在演训过程的射击情况。
4.在原来的直瞄射击技能及战术训练中,由指挥人员操作和下达命令,指挥相应的装甲车辆进行固定射击训练并记录其射击结果。而新的智能化靶场中,作为蓝军靶标系统,面对距离较远,分布较广的重武器靶机,需要实现智能化的射击者判定功能。即实际射击训练过程中,除了要将射击结果上传,还要能够判定该次射击是由谁从什么距离的位置进行射击,才能完整的评估射击效果。在复杂的战术演练过程中,战场更为自由,装甲车辆和靶标距离较远且较为分散,且装甲车辆和重武器靶标均为移动目标。装甲车辆射击不会像轻武器射击一样,短时间产生大量数据,但是由于射击次数少,弹药成本高,则要求更高的匹配准确度。因此,如何准确无误的实现射击事件和命中事件的自主匹配功能十分重要。
技术实现要素:
5.针对现有技术的缺陷或不足,本发明提供了一种重武器靶机直瞄射击训练的匹配方法。
6.本发明所提供的方法是对一次战术训练中发生的多个射击事件和多个命中事件进行匹配;
7.所述多个射击事件中的任意一个射击事件为其中,为发生该次射击事件的重武器车辆id,为该次射击事件的发生时刻,为该次射击事件发生时重武器上主天线经度,为该次射击事件发生时重武器上主天线纬度,该次射击事件发生时重武器上副天线经度,为该次射击事件发生时重武器上副天线纬度,为射击后炮弹速度影响因子,
8.所述多个命中事件中的任意一个命中事件为其中,为该次命中靶标的编号,为该次命中事件的命中时刻,为该次命中时刻靶标的主天线经度,为该次命中时刻靶标的主天线纬度,为该次命中时刻靶标的副天线经度,为该次命中时刻靶标的副天线纬度;
9.任意一个事件p
x
和任意一个命中事件qy的匹配方法包括:
10.(1)若则执行步骤(2);若则任意一个事件p
x
和任意一个命中事件qy不匹配;
11.(2)若则执行步骤(3),否则任意一个事件p
x
和任意一个命中事件qy不匹配,其中,r为此次训练中所使用武器的有效杀伤距离,v为此次训练所用武器炮弹出膛后在有效杀伤距离内的平均速度;
12.(3)若且α
xy
≤α0,则任意一个射击事件p
x
和任意一个命中事件qy匹配,否则两者不匹配,其中:
13.s
yx
为任意一个射击事件p
x
所属的射击者射击时所在位置和任意一个命中事件qy所属的靶标命中时所在位置的空间距离;
[0014][0015]
r为地球平均半径;
[0016]
α
xy
为和的夹角,α0为射击角,为射击事件p
x
的主天线空间坐标点p1
x
与副天线空间坐标点p2
x
的构成的矢量,由主指向副,为射击事件p
x
的主天线空间坐标点p1
x
与命中事件qy主天线空间坐标点q1y之间构成的方向矢量。
[0017]
进一步,所述多个射击事件中的任意一个射击事件为其中,为发生该次射击事件的重武器射击序次。
[0018]
进一步,所述多个命中事件中的任意一个命中事件为其中,为该次命中事件中靶标的命中区域。
[0019]
进一步,所述多个命中事件中的任意一个命中事件为其中,为该次命中时刻靶标靶面法向与靶标基准方向的夹角,为该次命中事件中靶标的命中区域。
[0020]
进一步,所述步骤(3)中的替换为σ0为阈值,σ0=20-45ms。
[0021]
进一步,本发明的方法包括:
[0022]
step1,设置初始参数:此次训练所用重武器的有效杀伤距离r;地球平均半径r;此次训练所用重武器的炮弹出膛后在有效杀伤距离内的平均速度为v;偏差阈值σ0;
[0023]
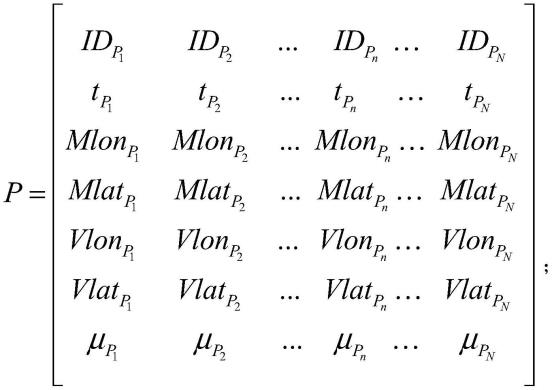
step2,对于对一次战术训练中发生的多个射击事件和多个命中事件分多个周期进行核算,判断匹配情况;对于任意一个核算周期内的多个射击事件p和多个命中事件q构建相应矩阵:
[0024][0025][0026]
step3,构建初始匹配矩阵d,d=[d1,d2,...dm,
…
,dm],dm为任意命中事件qm的匹配矩阵,dm初始为p,dm=[dm(1),dm(2),...dm(n),
…
,dm(n)],dm(n)=pn;pn为多个射击事件p中的任意一个射击事件,m=1,2,3,...,m,m为大于等于2的自然数,n=1,2,3,...,n,n为大于等于2的自然数,
[0027]
step4,对初始匹配矩阵d进行初筛,遍历所有命中事件的匹配矩阵中的所有向量,对于任意命中事件qm和其匹配矩阵中的任意向量dm(n),若或则令向量dm(n)取g,其中g=[0,0,0,0,0,0,0,0]
t
;得到初筛后的匹配矩阵;
[0028]
step5,根据初筛后的匹配矩阵构建空间距离矩阵s、匹配因子矩阵σ和射击角度矩
阵α:
[0029][0030][0031][0032]
若g=[0,0,0,0,0,0,0,0]
t
,则,s
mn
=0,σ
mn
=σ0+1,α
mn
=α0+1,α0为射击角;否则,为射击角;否则,α
mn
为和的夹角,为射击事件pn的主天线空间坐标点p1n与副天线空间坐标点p2n的构成的矢量,由主指向副,为射击事件pn的主天线空间坐标点p1n与命中事件qm主天线空间坐标点q1m之间构成的方向矢量;
[0033]
step6,构建多个射击事件p的匹配结果矩阵w=[w1,w2,...wn,
…
,wn],
[0034]
若σ
mn-σ0≤0,且α
mn
≤α0,则射击事件pn与命中事件qm匹配,
[0035]
若σ
mn-σ0》0或α
mn
》α0,则射击事件pn与命中事件qm不匹配,其中:o=[0,0,0,0,0,0,0]
t
。
[0036]
进一步,
[0037][0038][0039]
进一步,step6包括:构建多个射击事件p的匹配结果矩阵w=[w1,w2,...wn,
…
,wn],
[0040]
若σ
mn-σ0≤0,α
mn
≤α0,且γ
mn
≤γ0,则射击事件pn与命中事件qm匹配,且靶标报靶有效,效,为命中事件qm的靶面法向单位向量,的靶面法向单位向量,为射击事件pn的主天线空间坐标点p1n与副天线空间坐标点p2n的构成的矢量,由主指向副,为命中事件qm命中时刻靶标靶面法向与靶标基准方向的夹角,为命中事件qm的主天线空间坐标点q1m与副天线空间坐标点q2m的构成的矢量,由主指向副;γ0为入射角临界值,γ0=15
°
;
[0041]
若σ
mn-σ0≤0,α
mn
≤α0,且γ
mn
》γ0,则射击事件pn与命中事件qm匹配,但靶标报靶无效,
[0042]
若σ
mn-σ0》0或α
mn
》α0,则射击事件pn与命中事件qm不匹配,其中:o=[0,0,0,0,0,0,0,0]
t
。
[0043]
本发明还提供了重武器靶机直瞄射击训练的匹配系统。所提供的系统包括匹配模块,该匹配模块用于实现上述方法。
[0044]
本发明的方法采用数据筛选方法,可以有效的提高匹配效率,降低数据匹配的时间;同时利用唯一性判定原则,对事件进行两两判定,并可以判断射击事件中未命中的情况,并且利用命中事件所属终端必然在与之匹配的射击事件所属终端射击域内的判断原则进行核验,可以有效提高匹配的准确度。
[0045]
除此之外,本发明的方法中采用矩阵式处理数据的方式,便于数据的存储和调用,在调试过程中也方便查找问题;并且匹配结果用矩阵表示方便结果的查询。
具体实施方式
[0046]
除非有特殊说明,本文中的术语根据相关领域普通技术人员的认识理解。
[0047]
射击事件的触发由装甲车辆装备的车辆终端进行记录并上传事件信息,装甲车辆通过其装备的武器完成一次单发射击动作记录为一次射击事件,连发射击记录为多次射击事件。一次射击事件记录为p,包含的参数有车辆id;射击时刻t;射击者射击时刻的主天线经纬度坐标mlon和mlat,副天线经纬度坐标vlon和vlat,主、副天线均安装在炮塔上方,且位于炮管延长线上,由主天线指向副天线的方向代表了射击时的射向,此外取主天线的坐标用于代表装甲车辆的位置信息,取副天线的坐标用于计算射向;速度影响因子μ主要受射击时刻所处的环境影响,例如风速,风向等,其是由装备采集实时得到一个具体值,用于修正此次射击的平均速度,μ的取值范围是0.8-1.2。进一步还可以包括射击序次ord,一般武器在实战时会配发一定数量的炮弹,该参数可以统计是第几发炮弹命中,便于统计,也可以检测作弊,射击序次ord的取值为每击发一次数值加一,上限为武器最大携弹量。例如,第x次射击事件用列向量记为:
[0048]
命中事件的触发由重武器靶标终端进行记录和上传,重武器靶标的有效检测位置受到炮弹的一次有效射击将触发一次命中事件,连续受弹将记录为多次命中事件。一次射击事件记录为q,包含的参数有重武器靶标id;命中时刻t,命中时刻的重武器靶标的主天线经纬度坐标mlon和mlat,;副天线经纬度坐标vlon和vlat,;主、副天线均安装在靶标的底盘车辆上,且主、副天线的连线与底盘车辆的行驶方向(靶标基准方向)平行,即由主天线指向副天线的方向代表了车辆行驶的方向,此外取主天线的坐标用于代表靶标的位置信息,取副天线的坐标用于计算行进方向。进一步还包括命中时靶面法向与靶标基准方向的夹角记为靶面角β,靶标靶面可以绕轴旋转,并由编码器测量角度β,通过这个值,以及射击事件的位置信息和命中事件位置信息,可以综合计算出每次的入射角度,并判断是否报靶有效,若靶标为固定靶,则β=0,若靶标为运动靶,则β由靶标旋转机构的编码器测量得到。进一步还包括在靶标上的命中区域reg,命中区域reg的取值由所携带靶型以及靶型所分区域种类决定,其中靶型及靶型所分区域种类以军事训练大纲内所要求为准,例如全身靶常分为五个
区域(分别为:头部、心脏、胸部、腹部和其他),半身靶分为三个区域(分别为:头部、心脏和胸部),命中事件中加入reg相,一方面可以实现对射击结果的精确判定,更加准确评估射击者的射击水平;另一方面也更贴合实际射击结果的模拟,例如当射击到头部和心脏,则靶标判定死亡;射击到胸部、腹部以及其他,则靶标判定受伤。例如,第y次命中事件用列向量记为:
[0049][0050]
射击事件中的射击时刻和命中事件中的命中时刻均为卫星授信时钟。由于炮弹射击距离较远,风速影响不可忽略,设风速在顺风、逆风和斜侧风(只考虑对炮弹实际平均速度计算有影响的风力情况)等环境因素对速度的影响因子为μ,采用μ对无风状态下所用武器炮弹出膛后在有效杀伤距离内的平均速度v进行修正更接近实际情况,其中μ∈[μ
min
,μ
max
]。武器的有效杀伤距离为r,r的取值范围与射击所使用的武器类型有关,例如一次射击事件由某型坦克射击触发,其有效直射距离在1900-2000米左右,同样,其炮弹的无风状态下平均速度在1600-1800米/秒,具体准确值需要根据试验进行测定。
[0051]
以射击事件p
x
和命中事件qy为例,本发明的匹配原则解释如下:
[0052]
1)若射击事件p
x
和命中事件qy相匹配,则射击事件p
x
必然发生在命中事件qy之前,即:
[0053]
2)武器有效杀伤距离为r,在判定射击者时,位于重武器靶标半径r以外的装甲车辆则不计算在内,所以,命中事件所属重武器靶标必然位于射击事件所属车辆终端的有效杀伤距离r内,即:
[0054][0055]
由于涉及距离的计算较为繁琐,且当数据量较大时影响计算的速度,所以,可以取有效杀伤距离r的射击时长tr进行判断,即对于两者匹配的射击事件p
x
和命中事件qy来说,其时间差应小于射击时长tr,即:其中:
[0056]
3)对于一个命中事件qy必然存在一个与之相匹配的射击事件p
x
,而两者理论上存在以下唯一关系:
[0057][0058]
其中:
[0059]
为命中事件发生的时刻,为卫星授信时间;
[0060]
为射击事件发生的时刻,为卫星授信时间;
[0061]
为射击事件发生时的速度影响因子;
[0062]
v为炮弹出膛后在有效杀伤距离内的平均速度;
[0063]syx
为第y次命中事件所属的靶标终端在命中时刻所在位置和第x次射击事件所属的武器终端射击时刻所在位置的空间距离,由于车辆终端和靶标终端均含主、副天线,且主、副天线的距离相比终端之间距离可以忽略不计,本发明以主天线的坐标进行计算,
[0064][0065]
并且,由于对于一个命中事件qy,其所属靶标终端所在的空间位置,必然位于与之匹配的射击事件p
x
所属终端的射击域内,也就是说则和的夹角α
xy
在射击角α0(重武器直瞄准,射击角α0为[-2
°
,2
°
]内),即α
xy
≤α0,其中:,其中:代表射击事件p
x
的主天线空间坐标点p1
x
与副天线空间坐标点p2
x
的构成的矢量,由主指向副,代表射击事件p
x
和与命中事件qy之间构成的方向矢量,即射击事件p
x
主天线空间坐标点与命中事件qy主天线空间坐标点q1y的构成的矢量。
[0066]
在一场演习当中,投入的装甲车辆和装甲靶标数量较多,对每个命中事件需要逐一与每个射击事件进行判定,会造成大量运算,因此在匹配前可以通过上述步骤(1)和(2)进行初步筛选,然后再采用步骤(3)完成最终判定,提高匹配效率。
[0067]
进一步方案中,考虑在实际射击过程中,由于存在着各种影响因素,导致测量的所有参数都存在着一定误差,因此很难满足理论上的等式判定,因此我们设定一个阈值σ0,当偏差落入阈值σ0范围内时,则认定两者匹配,即:
[0068][0069]
进一步还有些方案中,考虑到重武器射击距离较远,且炮弹的平均速度很难准确衡量,可能存在所匹配的结果不准确的情况,对与同一个命中事件来说也可能存在一个或多个满足上述匹配要求的射击事件;并且,由于装甲武器靶标采用激波报靶,对于射入其中的炮弹有一定入射角要求,当满足入射角条件时,认为报靶的精度满足要求,即命中且命中区域结果有效,反之则为命中但命中区域结果无效,进一步对上述方案的匹配结果进一步进行核验:
[0070]
对于一个命中事件qy,其所属靶标终端所在的空间位置,必然位于与之匹配的射击事件p
x
所属终端的射击域内,对于命中后的结果进行判断,理论上,当垂直射入靶面时,报靶的精度最高,设入射角为γ,入射角临界值为γ0,γ0取值一般为[-15
°
,15
°
],若:γ≤γ0则报靶精度满足要求,炮弹命中且命中区域结果有效,否则结果仅为命中,但命中区域结果无效,具体计算解释如下:
[0071]
设命中事件qm靶面法向单位向量为由于命中时靶面法向与靶标基准方向的夹角记为靶面角为则
[0072][0073]
由于为单位向量,可以解方程组得到其值。则对命中事件qm和射击事件pn,可以
利用向量求得射击方向与靶面法向之间的夹角,即可得到入射角γ
mn
的值,公式如下:
[0074][0075]
从而,当γ
mn
≤γ0,表示射击命中,且命中区域报靶有效,结果矩阵中用“1”表示;反之表示射击命中,但命中区域报靶无效。结果矩阵中用“2”表示。
[0076]
实施例:
[0077]
该实施例通过对战术训练进行模拟,并记录射击事件和命中事件的匹配情况,之后采用本发明的方法对模拟获得的多个射击事件和多个命中事件进行匹配。
[0078]
战术训练模拟:两辆装备有车辆终端的坦克利用其主炮,分别对位于800米、1300米、1800米的车辆靶标进行随机射击,共射击十发炮弹,过程中人工记录射击事件与命中事件的匹配关系,经统计,共收集到10个射击事件、8个命中事件,其中,1号坦克上传6个射击事件,2号坦克上传4个射击事件,800米处固定车辆靶标上传4个命中事件,1300米处固定靶标上传3个命中事件,1800米处固定靶标上传1个命中事件。
[0079]
之后采用本发明的方法进行匹配:
[0080]
step1,设置初始参数:此次训练所用重武器的有效杀伤距离r=1950m;地球平均半径r=6371千米;此次训练所用重武器的炮弹出膛后在有效杀伤距离内的平均速度为v=1700m/s;偏差阈值σ0=33;
[0081]
step2,对于对一次战术训练中发生的多个射击事件和多个命中事件分多个周期进行核算,判断匹配情况;对于任意一个核算周期内的多个射击事件p和多个命中事件q构建相应矩阵:
[0082]
[0083][0084]
step3,构建初始匹配矩阵d,d=[d1,d2,...dm,
…
,dm],dm为任意命中事件qm的匹配矩阵,dm初始为p,dm=[dm(1),dm(2),...dm(n),
…
,dm(n)],dm(n)=pn;pn为多个射击事件p中的任意一个射击事件,m=1,2,3,...,m,m为大于等于2的自然数,n=1,2,3,...,n,n为大于等于2的自然数,
[0085]
step4,对初始匹配矩阵d进行初筛,遍历所有命中事件的匹配矩阵中的所有向量,对于任意命中事件qm和其匹配矩阵中的任意向量dm(n),若或则令向量dm(n)取g,其中g=[0,0,0,0,0,0,0,0]
t
;得到初筛后的匹配矩阵;
[0086]
step5,根据初筛后的匹配矩阵构建空间距离矩阵s、匹配因子矩阵σ和射击角度矩阵α:
[0087][0088][0089]
[0090]
若g=[0,0,0,0,0,0,0,0]
t
,则,s
mn
=0,σ
mn
=σ0+1,α
mn
=α0+1,α0为射击角,α0=2;
[0091]
否则,否则,α
mn
为和的夹角,为射击事件pn的主天线空间坐标点p1n与副天线空间坐标点p2n的构成的矢量,由主指向副,为射击事件pn和与命中事件qm之间构成的方向矢量。
[0092]
step6,构建多个射击事件p的匹配结果矩阵w=[w1,w2,...wn,
…
,wn],
[0093]
若σ
mn-σ0≤0,α
mn
≤α0,且γ
mn
≤γ0,则射击事件pn与命中事件qm匹配,且靶标报靶有效,效,效,为命中事件qm的靶面法向单位向量,的靶面法向单位向量,为射击事件pn的主天线空间坐标点p1n与副天线空间坐标点p2n的构成的矢量,由主指向副,为命中事件qm命中时刻靶标靶面法向与靶标基准方向的夹角,为命中事件qm的主天线空间坐标点q1m与副天线空间坐标点q2m的构成的矢量,由主指向副;γ0为入射角临界值,γ0=15
°
;
[0094]
若σ
mn-σ0≤0,α
mn
≤α0,且γ
mn
》γ0,则射击事件pn与命中事件qm匹配,但靶标报靶无效,
[0095]
若σ
mn-σ0》0或α
mn
》α0,则射击事件pn与命中事件qm不匹配,其中:o=[0,0,0,0,0,0,0,0]
t
。
[0096]
将匹配后的结果与人工记录情况进行对比,射击事件和命中事件匹配结果与人工记录的匹配结果完全一致。其中,由于判定过程中存在2个命中事件入射角不满足要求,2个命中事件的命中有效,报靶结果无效。试验测试结构满足匹配要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1