弹道修正引信的执行机构
1.本发明属变于弹道修正弹药技术领域,具体涉及一种模仿蚕蛹尾部自由旋转摆动,使弹药引信头部自由偏转的弹道修正引信的执行机构。
技术背景
2.随着武器装备技术的不断发展,现代战争模式和战场空间发生了根本性的变化,现代战争要求对平民和对非军事设施的附带损毁最小。普通炮弹在发射时已经确定弹道,当目标被障碍物遮挡住,只能大量发射炮弹摧毁障碍物后才能击中目标,造成了大量的炮弹资源浪费。精确打击弹药首推导弹,但导弹成本太高,并且生产和维护技术复杂,不能大量装备部队,仅适用对付高价值的有限目标,不适用巷战等小规模战斗。
3.为了解决该问题,模仿蚕蛹尾部自由旋转摆动,控制弹药引信头部自由偏转,将传统的炮弹进行改造,使其在发射后能够实现弹头偏转,进行弹道修正,从而躲避障碍物,较为精准地将炮弹发射到目标周围的一定范围,避免因无法击中目标而大量发射炮弹造成的资源浪费。
技术实现要素:
4.本发明的目的是提供一种弹道修正引信的执行机构,使弹头全周向偏离轴线5度以上,实现飞行过程中进行弹道修正。
5.一种弹道修正引信的执行机构,包括有第一壳体、第二壳体、螺栓、支撑杆、球副球体、第一驱动杆、第二驱动杆、第一微型电机、第二微型电机、第一连接杆、第二连接杆、支撑架和球副球槽;
6.第一壳体下部与第二壳体上部同球心连接并能够全周向转动;第二壳体与螺栓固接;支撑杆上部与壳体内上部固接;支撑杆下部与球副球体上部固接;球副球体下部与球副球槽同球心连接;第一连接杆、第二连接杆外端与第二壳体固接;第一连接杆、第二连接杆内端分别与第一微型电机、第二微型电机外端固接;第一微型电机、第二微型电机内端与第一驱动杆固接;支撑架外端与第二壳体固接,支撑架内端与球副球槽固接;支撑杆与第一驱动杆、第二驱动杆交叉处滑动连接。
7.第一壳体和第二壳体为壳体的组成部分,第一壳体和第二壳体之间连接处能够全周向转动;螺栓、支撑杆、球副球体、第一驱动杆、第二驱动杆、第一微型电机、第二微型电机、第一连接杆、第二连接杆、支撑架和球副球槽组成炮弹内部驱动装置。
8.本发明的工作原理是:
9.炮弹在飞行过程中,第一微型电机、第二微型电内含的信号接收器收到外部信号,控制第一微型电机、第二微型电转动,带动半圆状的第一驱动杆、第二驱动杆偏转,推动支撑杆以球副球体为球心转动,从而使第一壳体向不同方向偏转,达到弹头偏转的目的。
10.本发明的有益效果:
11.1.结构简单,制造相对容易。
12.2.壳体能够360
°
全周向转动,使炮弹能够向任意方向偏转。
13.3.相对于传统炮弹精度更高且能实现避障;相对于导弹造价更低,普适性更好。
附图说明
14.图1为本发明的弹头未偏转的正视图;
15.图2为本发明的弹头偏转5度时的正视图;
16.图3为本发明去除壳体的内部驱动装置示意图;
17.图4为本发明的第一壳体及内部驱动装置示意图;
18.图5为本发明的第二壳体及内部驱动装置示意图;
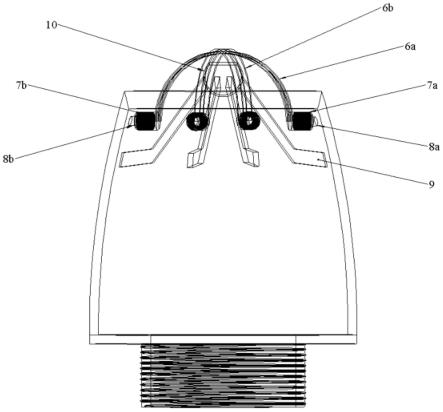
19.图6为本发明的炮弹整体结构示意图。
20.其中:1-第一壳体;2-第二壳体;3-螺栓;4-支撑杆;5-球副球体;6a-第一驱动杆;6b-第二驱动杆;7a-第一微型电机;7b-第二微型电机;8a-第一连接杆;8b-第二连接杆;9-支撑架;10-球副球槽。
具体实施方式
21.如图1至图6所示,一种弹道修正引信的执行机构,包括有第一壳体1、第二壳体2、螺栓3、支撑杆4、球副球体5、第一驱动杆6a、第二驱动杆6b、第一微型电机7a、第二微型电机7b、第一连接杆8a、第二连接杆8b、支撑架9和球副球槽10;
22.第一壳体1下部与第二壳体2上部同球心连接并能够全周向转动;第二壳体2与螺栓3固接;支撑杆4上部与壳体1内上部固接;支撑杆4下部与球副球体5上部固接;球副球体5下部与球副球槽10同球心连接;第一连接杆8a、第二连接杆8b外端与第二壳体2固接;第一连接杆8a、第二连接杆8b内端分别与第一微型电机7a、第二微型电机7b外端固接;第一微型电机7a、第二微型电机7b内端与第一驱动杆6a固接;支撑架9外端与第二壳体2固接,支撑架9内端与球副球槽10固接;支撑杆4与第一驱动杆6a、第二驱动杆6b交叉处滑动连接。
23.第一壳体1和第二壳体2为壳体的组成部分,第一壳体1和第二壳体2之间连接处能够全周向转动;螺栓3、支撑杆4、球副球体5、第一驱动杆6a、第二驱动杆6b、第一微型电机7a、第二微型电机7b、第一连接杆8a、第二连接杆8b、支撑架9和球副球槽10组成炮弹内部驱动装置。
24.本实施例的工作原理是:
25.炮弹在飞行过程中,第一微型电机7a、第二微型电7b内含的信号接收器收到外部信号,控制第一微型电机7a、第二微型电7b转动,带动半圆状的第一驱动杆6a、第二驱动杆6b偏转,推动支撑杆以球副球体5为球心转动,从而使第一壳体1向不同方向偏转,达到弹头偏转的目的。
26.实施例一:
27.口径为40mm的炮弹在飞行过程中接收到信号,信号接收器驱动第一微型电机7a、第二微型电机7b分别转动8
°
和4
°
,带动半圆状的第一驱动杆6a、第二驱动杆6b分别偏转8
°
和4
°
,推动支撑杆4以球副球体5为球心偏转1.65
°
,从发射到击中目标的位移为289.65m,偏转位移为17.79m,若障碍物为直径20m,则无法达成避障效果。
28.实施例二:
29.口径为40mm的炮弹在飞行过程中接收到信号,信号接收器驱动第一微型电机7a、第二微型电机7b分别转动16
°
和8
°
,带动半圆状的第一驱动杆6a、第二驱动杆6b分别偏转16
°
和8
°
,推动支撑杆4以球副球体5为球心偏转2.89
°
,从发射到击中目标的位移为275.59m,偏转位移为32.65m,若障碍物为直径20m,可以达到避障效果。
30.实施例三:
31.口径为40mm的炮弹在飞行过程中接收到信号,信号接收器驱动第一微型电机7a、第二微型电机7b分别转动16
°
和16
°
,带动半圆状的第一驱动杆6a、第二驱动杆6b分别偏转16
°
和16
°
,推动支撑杆4以球副球体5为球心偏转5
°
,从发射到击中目标的位移为263.15m,偏转位移为48.63m,若障碍物为直径20m,可以达到避障效果。
技术特征:
1.一种弹道修正引信的执行机构,其特征在于:包括有第一壳体(1)、第二壳体(2)、螺栓(3)、支撑杆(4)、球副球体(5)、第一驱动杆(6a)、第二驱动杆(6b)、第一微型电机(7a)、第二微型电机(7b)、第一连接杆(8a)、第二连接杆(8b)、支撑架(9)和球副球槽(10);第一壳体(1)下部与第二壳体(2)上部同球心连接并能够全周向转动;第二壳体(2)与螺栓(3)固接;支撑杆(4)上部与壳体(1)内上部固接;支撑杆(4)下部与球副球体(5)上部固接;球副球体(5)下部与球副球槽(10)同球心连接;第一连接杆(8a)、第二连接杆(8b)外端与第二壳体(2)固接;第一连接杆(8a)、第二连接杆(8b)内端分别与第一微型电机(7a)、第二微型电机(7b)外端固接;第一微型电机(7a)、第二微型电机(7b)内端与第一驱动杆(6a)固接;支撑架(9)外端与第二壳体(2)固接,支撑架(9)内端与球副球槽(10)固接;支撑杆(4)与第一驱动杆(6a)、第二驱动杆(6b)交叉处滑动连接。
技术总结
一种弹道修正引信的执行机构,属于炮弹引信驱动技术领域,第一壳体和第二壳体为壳体的组成部分,第一壳体和第二壳体之间连接处能够全周向转动;螺栓、支撑杆、球副球体、第一驱动杆、第二驱动杆、第一微型电机、第二微型电机、第一连接杆、第二连接杆、支撑架和球副球槽组成炮弹内部驱动装置。内部驱动装置能够驱动壳体偏转,使弹头全周向偏离轴线5度以上,在飞行过程中实现弹头偏转从而进行弹道修正,实现较为精准地击打障碍物后方的目标。本发明壳体能够360
技术研发人员:张成春 孙健 司尚博 沈淳 吴正阳 任露泉
受保护的技术使用者:吉林大学
技术研发日:2022.07.12
技术公布日:2022/10/20
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1