一种基于双数据链辅助的弹体导航方法与流程
本发明涉及惯性导航,特别涉及一种基于双数据链辅助的弹体导航方法。
背景技术:
1、导航系统作为一种定位导航设备,可以为弹体发射提供准确的姿态、速度和位置信息,以实现对目标的精准命中,导航系统是弹体发射过程中至关重要的一环。弹体飞行过程中,弹体周围空气流动紊乱且复杂,弹体动压传感器测量出的空速存在固定偏差,致使导体导航系统精度严重影响,基于数据链辅助的导航系统能够提供弹体相对发射点或者数据链观测点的目标方位角,可以在无gps情况下、空速测量误差大的情况下,提高弹体的导航位置精度。
技术实现思路
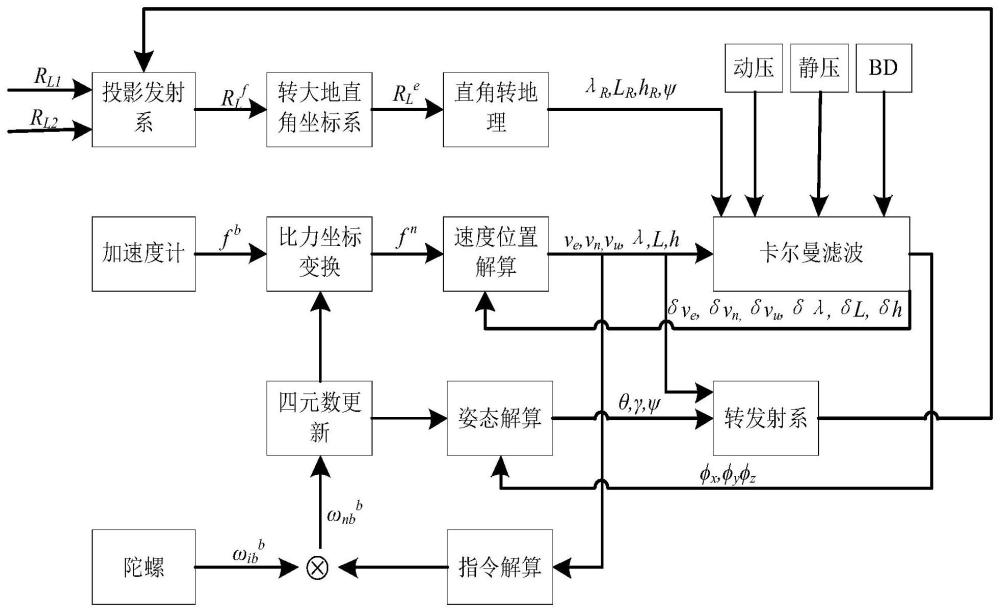
1、为了克服现有技术的不足,本发明提出一种基于双数据链辅助的弹体导航方法,具体包括以下步骤:
2、地面信号接收端通过数据链获取弹体在两个相邻时刻的位置与地面信号接收端的距离;
3、两个时刻的距离投影到发射坐标系中,计算得到两个时刻的航迹,将航迹信息转换到大地直角坐标系下,再转换到地理坐标系下;
4、将在地理坐标系下的经度、维度、高度以及航向角结合惯性导航的天向速度、东向速度、北向速度和经度、维度、高度作为卡尔曼滤波的观测值;
5、经过卡尔曼滤波对弹体的位置信息进行修正,得到最终弹体位置。
6、进一步的,将相邻两个时刻弹体与地面信号接收端的距离投影到发射坐标系中,包括:
7、
8、
9、
10、其中,为弹体位于p1时在发射系下的坐标;为弹体位于pt+1时在发射系下的坐标;rl1为弹体位于p1时相对于地面测控站的距离;rl2为弹体位于pt+1时相对于地面测控站的距离;q1为在发射坐标系,弹体相对原点地面测控站的仰角;q2为在发射坐标系,弹体相对原点地面测控站的仰角;ψ为弹体在发射坐标系的航向角。
11、进一步的,将航迹信息转换到大地直角坐标系下的过程包括:
12、
13、其中,(xe,ye,ze)为弹体实时位置的地心直角坐标;rn为子午圈曲率半径,(λ,l,h)为导航系统输出的坐标,λ表示经度,l表示纬度,h表示高度;表示弹体在发射系下的坐标,为发射坐标系到地心直角坐标系之间的转换矩阵。
14、进一步的,发射坐标系到地心直角坐标系之间的转换矩阵表示为:
15、
16、其中,α为发射方位角。
17、进一步的,弹体在飞行过程中,当有双数据链测得的航向角观测数据时,观测数据调整惯性测量单元的预测航向角,得到最优待测参数最优估计值,利用此最优估计值作为惯性测量单元的下一时刻的初始值,积分得到航向角模拟值,遇到下一时刻的双数据链观测数据时循环以上步骤实现模型的不断预测和更新,具体包括以下步骤:
18、
19、
20、
21、
22、
23、其中,为k+1时刻的弹体航向角预测值;mk,k+1为k时刻到k+1时刻的状态变换关系;为k时刻弹体航向角的分析值;为k+1时刻的预测值的误差协方差矩阵;为mk,k+1的转置;为k时刻的分析值误差协方差矩阵;qk为双数据链获取航向角的误差方差矩阵;为k+1时刻弹体航向角的状态分析值;为k+1时刻的弹体航向角预测值;kk+1为k+1时刻的增益矩阵;为k+1时刻的航向角观测值;hk+1为观测算子,即观测值与状态值之间的函数关系;为k+1时刻的预测值的误差协方差矩阵;为k时刻的分析值误差协方差矩阵。
24、进一步的,由双数据链相邻两时刻的航迹rl差分计算弹体在发射坐标系的航向角ψ,将第k+1时刻的该航向角作为观测值进行卡尔曼滤波,航向角的计算过程包括:
25、ψ=arctan(δy/δx)
26、其中,δy为通过航迹rl差分计算的纵轴距离差,δx为通过航迹rl差分计算的横轴距离差。
27、本发明基于双数据链辅助的导航系统能够获取弹体飞行中相对于观测点的位置信息,并且可以通过相邻两时刻弹体航迹对时间的积分,获取弹体飞行速度,以此位置信息和速度信息对弹体飞行的位置、速度进行短时的修正,完成弹体在天气等环境因素的影响下的无gps信号暂时失效的情境下的精准导航,并命中目标。
技术特征:
1.一种基于双数据链辅助的弹体导航方法,其特征在于,具体包括以下步骤:
2.根据权利要求1所述的一种基于双数据链辅助的弹体导航方法,其特征在于,将相邻两个时刻弹体与地面信号接收端的距离投影到发射坐标系中,包括:
3.根据权利要求1所述的一种基于双数据链辅助的弹体导航方法,其特征在于,将航迹信息转换到大地直角坐标系下的过程包括:
4.根据权利要求3所述的一种基于双数据链辅助的弹体导航方法,其特征在于,发射坐标系到地心直角坐标系之间的转换矩阵表示为:
5.根据权利要求1所述的一种基于双数据链辅助的弹体导航方法,其特征在于,弹体在飞行过程中,当有双数据链测得的航向角观测数据时,观测数据调整惯性测量单元的预测航向角,得到最优待测参数最优估计值,利用此最优估计值作为惯性测量单元的下一时刻的初始值,积分得到航向角模拟值,遇到下一时刻的双数据链观测数据时循环以上步骤实现模型的不断预测和更新,具体包括以下步骤:
6.根据权利要求2或5所述的一种基于双数据链辅助的弹体导航方法,其特征在于,由双数据链相邻两时刻的航迹rl差分计算弹体在发射坐标系的航向角ψ,将第k+1时刻的该航向角作为观测值进行卡尔曼滤波,航向角的计算过程包括:
技术总结
本发明涉及惯性导航技术领域,特别涉及一种基于双数据链辅助的弹体导航方法,包括地面信号接收端通过数据链获取弹体在两个相邻时刻的位置与地面信号接收端的距离;两个时刻的距离投影到发射坐标系中,计算得到两个时刻的航迹,将航迹信息转换到大地直角坐标系下,再转换到地理坐标系下;将在地理坐标系下的经度、维度、高度以及航向角结合惯性导航的天向速度、东向速度、北向速度和经度、维度、高度作为卡尔曼滤波的观测值;经过卡尔曼滤波对弹体的位置信息进行修正,得到最终弹体位置;本发明采用数据链原理辅助导航系统,在GPS受干扰情况下,保证弹体高精度的飞行轨迹和姿态。
技术研发人员:刘程,张时雨,许常燕,段志强,王旭东,李玲,谢长城,徐胡超,胡建东,杨德胜
受保护的技术使用者:中国电子科技集团公司第二十六研究所
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!