捆绑火箭固体助推器精确调整安装装置及安装方法与流程
本发明涉及带固体助推器的捆绑火箭,具体涉及一种捆绑火箭固体助推器精确调整安装装置及安装方法。
背景技术:
1、运载火箭可通过在芯级捆绑助推器的形式实现运载能力的提升,在助推器与芯级对接安装的最后阶段需微动精确调整助推器的位置,但助推器自身质量大、惯量大,助推器位置难以实现微动精确调整,对接安装过程费时费力。
技术实现思路
1、本发明的目的在于提供一种捆绑火箭固体助推器精确调整安装装置及安装方法,解决捆绑火箭固体助推器与芯级对接过程中固体助推器位置难以微动精确调整的问题。
2、为了达到上述的目的,本发明提供一种捆绑火箭固体助推器精确调整安装装置,包括助推器尾部精确调整安装装置和助推器前部精确调整安装装置;所述助推器尾部精确调整安装装置包括拉绳、拉力换向装置和拉力放大装置;拉力换向装置和拉力放大装置均与拉绳连接,拉绳一端连接于固体助推器尾部,拉绳另一端为施加拉力端;所述助推器前部精确调整安装装置为可伸缩连杆,可伸缩连杆的两端分别与助推器前部和芯级连接。
3、上述捆绑火箭固体助推器精确调整安装装置,其中,所述拉力换向装置为定滑轮,拉力放大装置为动滑轮或减速器;定滑轮安装于芯级,拉绳绕过定滑轮。
4、上述捆绑火箭固体助推器精确调整安装装置,其中,所述可伸缩连杆为丝杆机构或液压装置。
5、上述捆绑火箭固体助推器精确调整安装装置,其中,采用上述捆绑火箭固体助推器精确调整安装装置;固体助推器被吊至距离芯级大致位置后,先通过助推器尾部精确调整安装装置精确调整固体助推器尾部位置,进行固体助推器尾部与芯级的安装;固体助推器尾部与芯级安装后,通过助推器前部精确调整安装装置精确调整固体助推器前部位置,进行固体助推器前部与芯级的安装。
6、上述捆绑火箭固体助推器精确调整安装装置,其中,固体助推器位置粗调到位后,操作人员在拉绳另一端施加拉力,拉力放大装置放大该拉力大小,拉力换向装置改变该拉力作用力方向,通过拉力放大装置和拉力换向装置实现固体助推器尾部到芯级的微动精确调整,使分别安装于固体助推器和芯级的后捆绑机构精确对接,最终完成固体助推器尾部与芯级的对接安装。
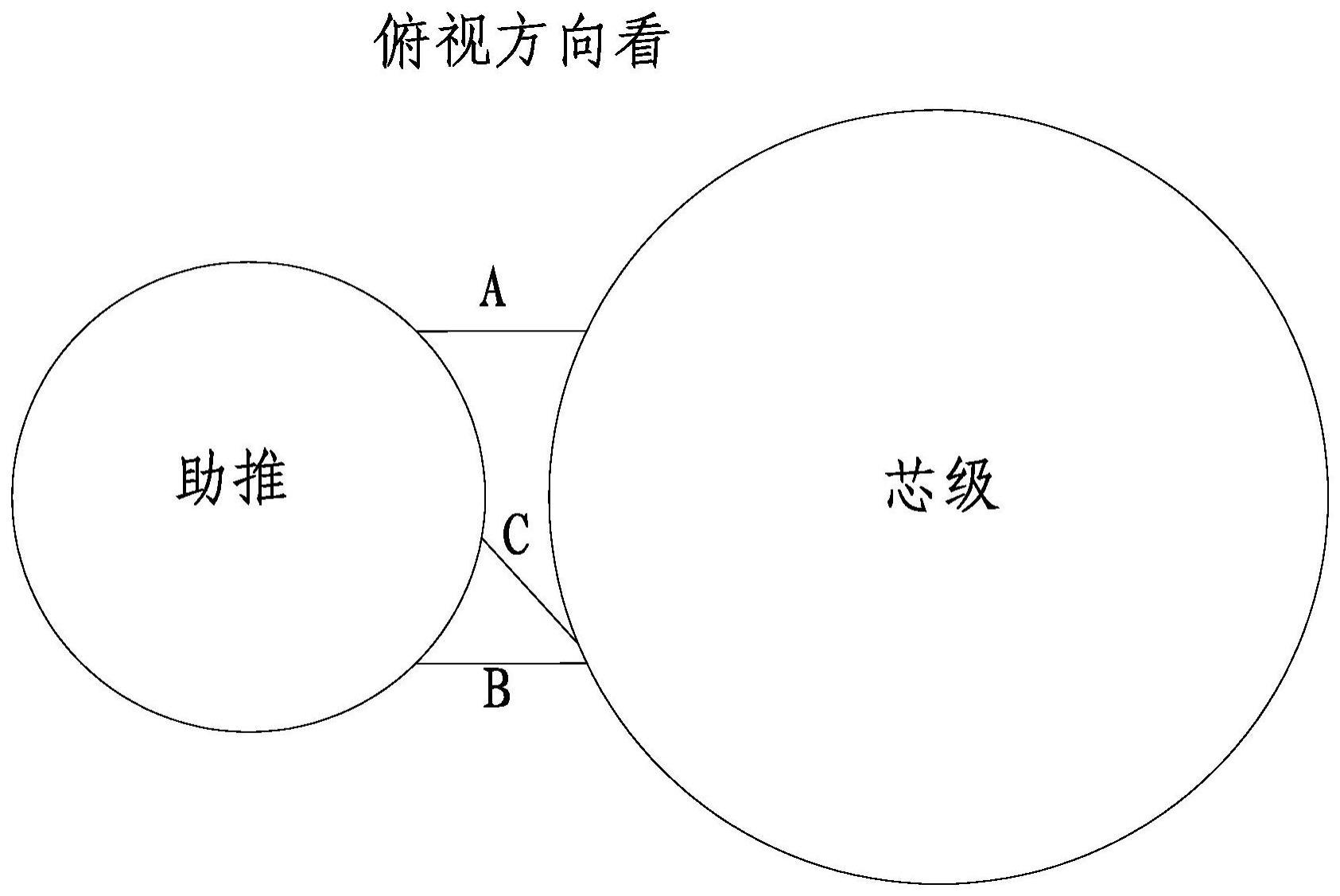
7、上述捆绑火箭固体助推器精确调整安装装置,其中,带固体助推器的捆绑火箭通过三套连杆组件实现固体助推器前部与芯级的安装;固体助推器尾部与芯级对接后,固体助推器前部粗调到位,在第一套连杆组件的两个连杆支座上安装一套助推器前部精确调整安装装置,在第二套连杆组件的两个连杆支座上安装另一套助推器前部精确调整安装装置,通过调节两套助推器前部精确调整安装装置不断缩进固体助推器与芯级之间的距离,当第三套连杆组件的两个连杆支座之间的距离等于第三套连杆组件的连杆的长度时,安装第三套连杆组件的连杆;拆下第一套连杆组件两个连杆支座上的助推器前部精确调整安装装置,调节第二套连杆组件两个连杆支座上的助推器前部精确调整安装装置,当第一套连杆组件的两个连杆支座之间的距离等于第一套连杆组件的连杆的长度时,安装第一套连杆组件的连杆;最后拆下第二套连杆组件两个连杆支座上的助推器前部精确调整安装装置,安装第二套连杆组件的连杆;第一套连杆组件的连杆与第二套连杆组件的连杆相互平行,第三套连杆组件的连杆与第一套连杆组件的连杆及第二连杆组件的连杆均成夹角。
8、与现有技术相比,本发明的有益技术效果是:
9、本发明的捆绑火箭固体助推器精确调整安装装置及安装方法,通过助推器尾部精确调整安装装置和助推器前部精确调整安装装置实现固体助推器与芯级的微动精确调整安装,其优点是经济性好,实施容易,操作简便。
技术特征:
1.捆绑火箭固体助推器精确调整安装装置,其特征在于,包括助推器尾部精确调整安装装置和助推器前部精确调整安装装置;
2.如权利要求1所述的捆绑火箭固体助推器精确调整安装装置,其特征在于,所述拉力换向装置为定滑轮,拉力放大装置为动滑轮或减速器;定滑轮安装于芯级,拉绳绕过定滑轮。
3.如权利要求1所述的捆绑火箭固体助推器精确调整安装装置,其特征在于,所述可伸缩连杆为丝杆机构或液压装置。
4.捆绑火箭固体助推器精确调整安装方法,其特征在于,采用如权利要求1至3中任一权利要求所述的捆绑火箭固体助推器精确调整安装装置;
5.如权利要求4所述的捆绑火箭固体助推器精确调整安装方法,其特征在于,固体助推器位置粗调到位后,操作人员在拉绳另一端施加拉力,拉力放大装置放大该拉力大小,拉力换向装置改变该拉力作用力方向,通过拉力放大装置和拉力换向装置实现固体助推器尾部到芯级的微动精确调整,使分别安装于固体助推器和芯级的后捆绑机构精确对接,最终完成固体助推器尾部与芯级的对接安装。
6.如权利要求4所述的捆绑火箭固体助推器精确调整安装方法,其特征在于,带固体助推器的捆绑火箭通过三套连杆组件实现固体助推器前部与芯级的安装;固体助推器尾部与芯级对接后,固体助推器前部粗调到位,在第一套连杆组件的两个连杆支座上安装一套助推器前部精确调整安装装置,在第二套连杆组件的两个连杆支座上安装另一套助推器前部精确调整安装装置,通过调节两套助推器前部精确调整安装装置不断缩进固体助推器与芯级之间的距离,当第三套连杆组件的两个连杆支座之间的距离等于第三套连杆组件的连杆的长度时,安装第三套连杆组件的连杆;拆下第一套连杆组件两个连杆支座上的助推器前部精确调整安装装置,调节第二套连杆组件两个连杆支座上的助推器前部精确调整安装装置,当第一套连杆组件的两个连杆支座之间的距离等于第一套连杆组件的连杆的长度时,安装第一套连杆组件的连杆;最后拆下第二套连杆组件两个连杆支座上的助推器前部精确调整安装装置,安装第二套连杆组件的连杆;
技术总结
本发明涉及捆绑火箭固体助推器精确调整安装装置及安装方法,装置包括助推器尾部精确调整安装装置和助推器前部精确调整安装装置;助推器尾部精确调整安装装置包括拉绳、拉力换向装置和拉力放大装置;拉力换向装置和拉力放大装置均与拉绳连接,拉绳一端连接于固体助推器尾部,拉绳另一端为施加拉力端;助推器前部精确调整安装装置为可伸缩连杆,可伸缩连杆的两端分别与助推器前部和芯级连接。助推器位置粗调到位后,通过拉力换向装置与拉力放大装置实现助推器尾部位置的精确调整,直至后捆绑机构实现助推与芯级的对接安装;通过两个助推器前部精确调整安装装置进行助推器前部位置精调,逐一连接助推与芯级间的连杆,实现助推器前部与芯级的安装。
技术研发人员:董文丰,向长征,曾玉琴,赵志杰,何庆,袁菲,刘振东,宁国富
受保护的技术使用者:上海宇航系统工程研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!