一种对模型误差不敏感的二维修正引信落点预测控制方法
本发明涉及常规弹药简易制导/弹道修正控制,具体涉及一种对模型误差不敏感的二维修正引信落点预测控制方法。
背景技术:
1、传统落点预测方法对模型误差敏感程度较高,对预测模型的精度要求较高,当预测模型中的气动系数存在误差时,落点预测方法的预测精度会降低,甚至会导致错误修正,影响最终修正控制精度,算法的稳定性和鲁棒性差。
2、针对气动系数存在误差的问题,现有研究主要通过离线或在线气动系数辨识方法来得到更准确的气动系数。其中离线气动系数辨识结果的准确性与给定试验数据的数量及选用的辨识模型均相关,若试验数据太少,受弹体个体差异和飞行环境等影响,会导致辨识结果难以匹配实际飞行弹丸的气动系数。在线气动系数辨识方法同样依赖于参数辨识模型,当模型存在误差时,会影响气动系数辨识结果,且算法比较复杂,在实际工程上应用相对较少。
技术实现思路
1、有鉴于此,本发明提供了一种对模型误差不敏感的二维修正引信落点预测控制方法,通过迭代计算气动系数符合系数补偿值,在弹道模型存在误差情况下保证修正控制的有效性和正确性,从而降低落点预测方法对预测模型精度的要求。
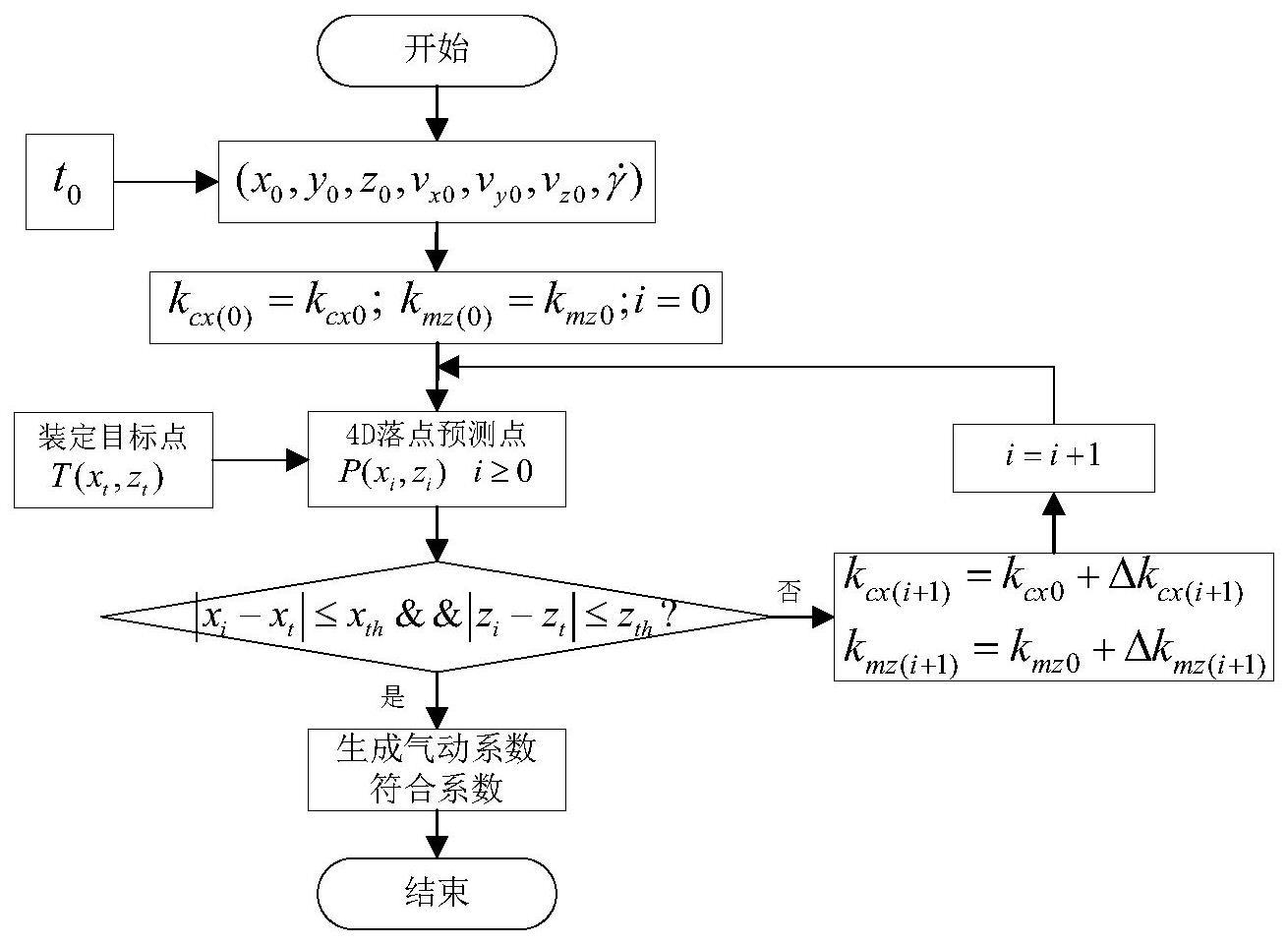
2、本发明的对模型误差不敏感的二维修正引信落点预测控制方法,在弹丸起控前,对落点预测模型的气动系数符合系数进行迭代补偿修正,具体包括:
3、s1,在迭代补偿修正起始工作时间t0时刻,利用落点预测模型对弹丸落点进行第一次预测;
4、s2,判断当前预测的落点与目标点之间的偏差是否在允许误差范围内;如果在,执行s4;如果不在,执行s3;
5、s3,对气动系数符合系数进行迭代补偿修正;其中,基于当前迭代过程和上一次迭代过程的预测偏差及符合系数补偿值,构建补偿值与偏差值的线性关系式,采用线性递推计算得到下一次迭代过程的气动系数符合系数补偿值;
6、基于采用迭代补偿修正后的气动系数符合系数的落点预测模型,对弹丸落点进行再次预测,返回s2;
7、s4,结束迭代补偿修正,基于采用当前迭代过程中的气动系数符合系数的落点预测模型,进行弹丸落点预测。
8、较优的,所述气动系数符合系数补偿值为:
9、
10、其中,δki+1、δki、δki-1分别为第i+1次、第i次、第i-1次弹丸落点预测时采用的气动系数符合系数补偿值;δxi、δxi-1分别为第i次、第i-1次迭代时的弹丸预测落点与目标点的偏差;初始值δk0=0,δx0为s1得到的第一次预测值与目标点偏差;α为比例系数,为初始设定值。
11、较优的,所述气动系数符合系数包括阻力系数符合系数和静力矩符合系数;基于阻力系数符合系数的迭代补偿修正,修正预测落点的射程偏差;基于静力矩符合系数的迭代补偿修正,修正预测落点的横向偏差。
12、较优的,落点预测模型采用4自由度弹道模型。
13、本发明还提供了一种基于落点预测模型误差迭代补偿修正的飞行控制方法,采用上述方法,在弹丸起控前,对落点预测模型的气动系数符合系数进行迭代补偿修正;弹丸起控后,基于迭代补偿修正后气动系数符合系数的落点预测模型进行弹丸落点预测,当预测落点与目标点之间的偏差大于控制阈值时,生成滚转角指令进行弹道修正,直至弹丸落地。
14、有益效果:
15、(1)本发明基于弹丸飞行过程中的实时落点预测偏差,在线迭代计算气动系数符合系数补偿值,实现落点预测模型误差校正,并将补偿后的气动系数符合系数用于落点预测模型实现弹道修正。本发明能够在不同落点预测模型误差情况下保证修正控制的有效性和正确性,避免误修正,从而降低了落点预测方法对落点预测模型精度的要求,使落点预测方法对落点预测模型误差不敏感,算法稳定性和鲁棒性较好。同时该方法不需额外建模,算法简单易实现,实时性好,且能够移植到硬件系统,从而实现在实际工程的应用。
16、(2)根据当前迭代过程和上一次迭代过程的预测偏差及符合系数补偿值,构建符合系数补偿值与预测偏差的线性关系式,并采用线性递推计算得到下一次迭代过程的气动系数符合系数补偿值,从而实现预测偏差的不断校正,计算方式简单,不需要建立复杂的计算模型。
17、(3)通过补偿修正阻力系数符合系数和静力矩符合系数即可修正预测落点的射程偏差和横向偏差,且射程偏差和横向偏差可独立修正,修正方式简单、可靠。
18、(4)落点预测模型采用4自由度弹道模型,该模型所需测量参数较少,计算速度较快,能够实现快速落点预测,满足实际工程的实时性要求。
技术特征:
1.一种对模型误差不敏感的二维修正引信落点预测控制方法,其特征在于,在弹丸起控前,对落点预测模型的气动系数符合系数进行迭代补偿修正,具体包括:
2.如权利要求1所述的方法,其特征在于,所述气动系数符合系数补偿值为:
3.如权利要求1或2所述的方法,其特征在于,所述气动系数符合系数包括阻力系数符合系数和静力矩符合系数;基于阻力系数符合系数的迭代补偿修正,修正预测落点的射程偏差;基于静力矩符合系数的迭代补偿修正,修正预测落点的横向偏差。
4.如权利要求1所述的方法,其特征在于,落点预测模型采用4自由度弹道模型。
5.一种基于落点预测模型误差迭代补偿修正的飞行控制方法,其特征在于,采用如权利要求1~4任一所述的方法,在弹丸起控前,对落点预测模型的气动系数符合系数进行迭代补偿修正;基于迭代补偿修正后气动系数符合系数的落点预测模型进行弹丸落点预测,当预测落点与目标点之间的偏差大于控制阈值时,生成滚转角指令进行弹道修正,直至弹丸落地。
技术总结
本发明公开了一种对模型误差不敏感的二维修正引信落点预测控制方法。本发明基于弹丸飞行过程中的实时落点预测偏差,在线迭代计算补偿修正气动系数符合系数,实现落点预测模型误差校正,并将迭代后的气动系数符合系数用于落点预测模型实现弹道修正。本发明能够在不同落点预测模型误差情况下保证修正控制的有效性和正确性,避免误修正,从而降低了落点预测方法对落点预测模型精度的要求,使落点预测方法对落点预测模型误差不敏感,算法稳定性和鲁棒性较好。同时该方法不需额外建模,算法简单易实现,实时性好,且能够移植到硬件系统,从而实现在实际工程的应用。
技术研发人员:申强,李红云,邓子龙,梁晨,杨东晓,宋荣昌,冯恒振,毛瑞芝
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!