一种高速无人机拦截方法和系统与流程
本发明实施例涉及但不限于防空,特别涉及高速无人机拦截方法和系统。
背景技术:
1、随着国际局势不断变化,国家安全不断提到更高的首要位置,放空是安全防卫的重要领域,随着导弹武器技术的飞速发展,其已逐渐成为现代战争中的核心利器,导弹武器甚至是一个国家军事实力的缩影,因其通常具有一定的突防能力,拦截导弹是防空任务的重要课题,然而随着无人机的发展,其高速性、机动性、低成本和轻量性的特点,使其成为替代导弹的另一种空中突袭的选择,同时俯冲式高速飞行的无人机因其体积小、难识别和速度快,常规的地对空导弹拦截方式效率低,成本高,损耗大,难以高效精确的拦截,因此,相关无人机拦截技术难以高效精准拦截高速飞行的无人机,需要相关的技术解决此问题。
技术实现思路
1、以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
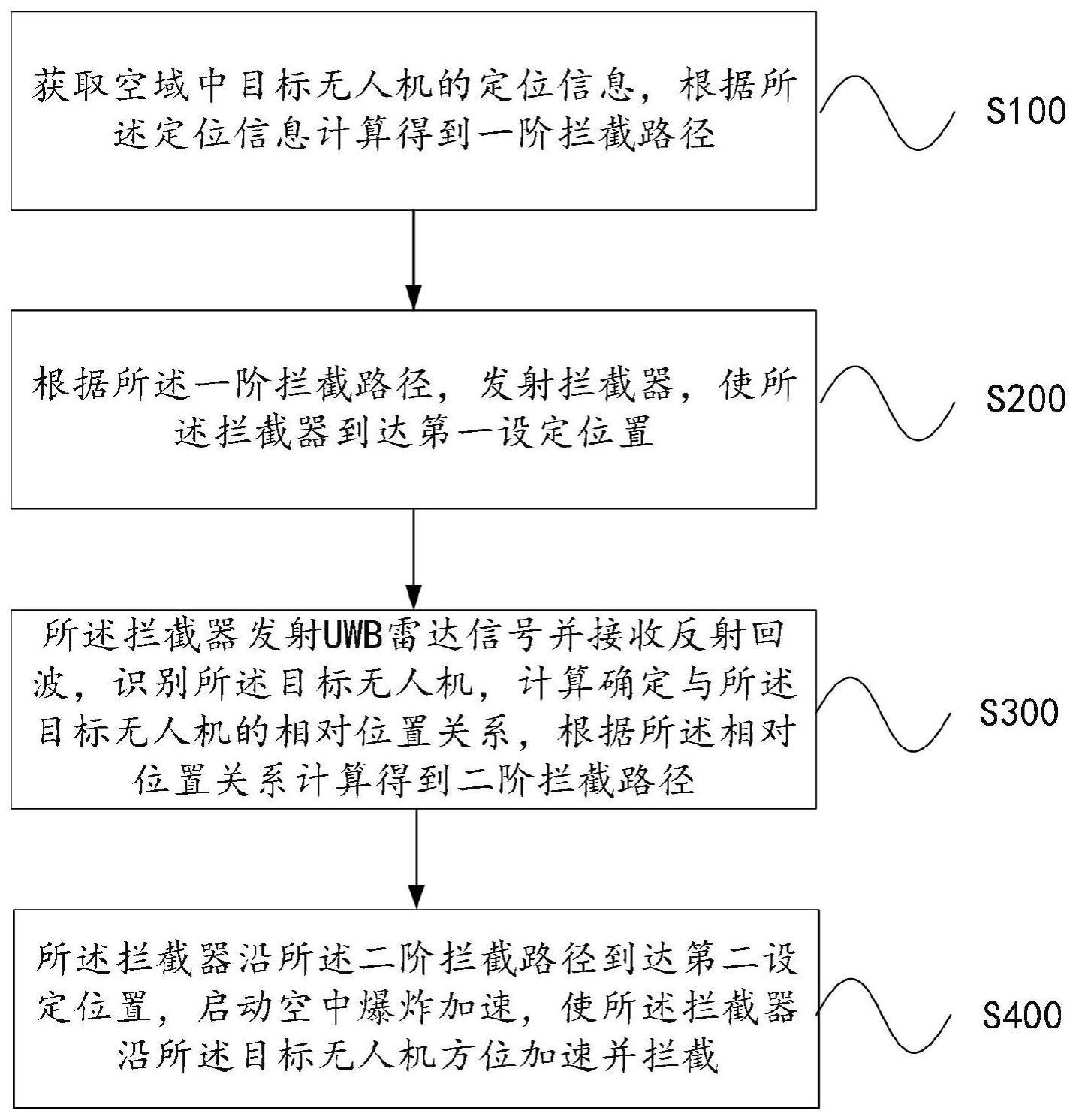
2、本发明第一方面的实施例提供了一种高速无人机拦截方法,通过获取空域中目标无人机的定位信息,根据定位信息计算得到一阶拦截路径,根据一阶拦截路径,发射拦截器,使拦截器到达第一设定位置,拦截器发射uwb雷达信号并接收反射回波,识别目标无人机,计算确定与目标无人机的相对位置关系,根据相对位置关系计算得到二阶拦截路径,拦截器沿二阶拦截路径到达第二设定位置,启动空中爆炸加速,使拦截器沿目标无人机方位加速并拦截,基于此,通过uwb雷达引导拦截器追踪目标无人机,通过空中爆炸进行二次加速,使拦截器高速追踪目标无人机,精准高效的拦截空域中的高速无人机入侵。
3、进一步,拦截器设置有动力系统、爆炸加速部、战斗部和导引系统。
4、进一步,导引系统包含有uwb雷达和紫外偏振光接收器。
5、进一步,向空域发射uwb雷达信号,探测空间内的物体;接收对应的反射回波,生成点云图,根据点云图解读空域内的物体类型信息;基于物体类型信息与预设无人机特征数据匹配,识别目标无人机,解读其对应的定位信息;定位信息包括目标无人机的飞行速度、飞行方向、对地距离和对地方向。
6、进一步,根据目标无人机的飞行速度和飞行方向,计算获得其第一预测飞行路径,根据第一预测飞行路径、对地距离、对地方向、拦截器的发射速度和拦截器uwb雷达的有效追踪距离,计算并设定拦截器的发射方向,获得一阶拦截路径。
7、进一步,根据一阶拦截路径和拦截器uwb雷达的有效追踪距离,计算并设置第一设定位置;高炮发射拦截器,使其沿一阶拦截路径飞行并到达第一设定位置。
8、进一步,根据识别到的目标无人机对应的uwb雷达点云数据,计算拦截器与目标无人机之间的相对距离、相对加速度和方位角,目标无人机的飞行方向;根据相对距离、相对加速度、方位角和目标无人机的飞行方向计算目标无人机的第二预测飞行路径并调整一阶拦截路径,获得二阶拦截路径。
9、进一步,根据战斗部的爆炸损伤范围和爆炸加速部对拦截器的速度增量,计算并设定第二设定位置;动力系统驱动拦截器沿二阶拦截路径飞行并到达第二设定位置;启动爆炸加速部进行空中爆炸,对拦截器进行空中二次加速;导引系统引导拦截器沿二阶拦截路径飞行,拦截器与目标无人机的相对距离进入战斗部的爆炸损伤范围内,传导引信引爆战斗部,拦截目标无人机。
10、进一步,传导引信包含uwb雷达、磁传导、红外传导、超声波传导中任一一种传导方式。
11、本发明另一方面实施例提供了一种高速无人机拦截系统,包括:拦截装置,用于追踪并拦截目标无人机;发射系统,用于识别目标无人机并发射拦截装置;其中,拦截装置包含有动力系统、爆炸加速部、战斗部和导引系统,导引系统引导拦截装置追踪并拦截目标无人机;爆炸加速部用于在空中爆炸对拦截装置进行空中二次加速。
12、本发明实施例包括:获取空域中目标无人机的定位信息,根据定位信息计算得到一阶拦截路径,据一阶拦截路径,发射拦截器,使拦截器到达第一设定位置,拦截器发射uwb雷达信号并接收反射回波,识别目标无人机,计算确定拦截器与目标无人机的相对位置关系,根据相对位置关系计算得到二阶拦截路径,拦截器沿二阶拦截路径到达第二设定位置,启动空中爆炸加速,使拦截器沿目标无人机方位加速并拦截,通过uwb雷达引导拦截器的飞行,并且经过空中二次爆炸加速,使拦截器高速追踪目标无人机,精准高效的拦截空域中的高速无人机入侵。
13、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种高速无人机拦截方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述拦截器设置有动力系统、爆炸加速部、战斗部和导引系统。
3.根据权利要求2所述的方法,其特征在于,所述导引系统包含有uwb雷达和紫外偏振光接收器。
4.根据权利要求2所述的方法,其特征在于,所述获取空域中目标无人机的定位信息,包括:
5.根据权利要求4所述的系统,其特征在于,所述根据所述定位信息计算得到一阶拦截路径,包括:
6.根据权利要求5所述的系统,其特征在于,所述根据所述一阶拦截路径,发射拦截器,使所述拦截器到达第一设定位置,包括:
7.根据权利要求6所述的系统,其特征在于,所述计算确定与所述目标无人机的相对位置关系,根据所述相对位置关系计算得到二阶拦截路径,包括:
8.根据权利要求7所述的系统,其特征在于,所述所述拦截器沿所述二阶拦截路径到达第二设定位置,启动空中爆炸加速,使所述拦截器沿所述目标无人机方位加速并拦截,包括:
9.根据权利要求8至所述的系统,其特征在于,所述传导引信包含uwb雷达、磁传导、红外传导、超声波传导中任一一种传导方式。
10.一种高速无人机拦截系统,其特征在于,包括:
技术总结
本发明公开了一种高速无人机拦截方法和系统,通过获取空域中目标无人机的定位信息,根据定位信息计算得到一阶拦截路径,根据一阶拦截路径,发射拦截器,使拦截器到达第一设定位置,拦截器发射UWB雷达信号并接收反射回波,识别目标无人机,计算确定与目标无人机的相对位置关系,根据相对位置关系计算得到二阶拦截路径,拦截器沿二阶拦截路径到达第二设定位置,启动空中爆炸加速,使拦截器沿目标无人机方位加速并拦截。基于此,上述方法可以精准高效的拦截空域中的高速无人机,维护空域安全。
技术研发人员:黄剑,张金华,石素珍
受保护的技术使用者:灯鱼软件(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!