一种行走式油菜菜苔采收机的制作方法
[0001]
本实用新型主要涉及农机器械领域,尤其涉及一种行走式油菜菜苔采收机。
背景技术:
[0002]
菜用油菜简称菜苔,菜苔属于直立鲜嫩叶类蔬菜,是从菜芯里抽出的苔,掐苔的尖部食用,采摘后对菜籽产量没有影响甚至有增产作用,采收时间一般在11月中旬至翌年3月底,由于菜苔主要以鲜食为主,使得加大了菜苔采收的时效性,完全依靠人力劳动强度大,成本较高,采用机械化收获一次性采摘往往造成采摘的菜苔大小不一,损伤较大,进而影响菜苔的卖相。
[0003]
而机械手是一种能模仿人手和臂的某些动作功能,用以按既定程序进行抓取,夹拉等操作,具有良好的采摘效果,目前现有的机械手一般只能做单纯的夹取动作,往往还需要多种驱动机构来配合,结构复杂,实施过程复杂,控制难度大,目前还没有被用于切割油菜菜苔的领域。
[0004]
因此研究针对菜苔采收配套的采收机械手在保证营养成分和食用品质良好的情况下,实现菜苔的机械化发展,对于菜苔采收增效、农民增收具有良好的发展前景。
技术实现要素:
[0005]
本实用新型要解决的技术问题是克服现有技术的不足,提供一种结构简单紧凑、使用灵活、成本低廉、可降低操作难度、能提高采收效率的行走式油菜菜苔采收机。
[0006]
为解决上述技术问题,本实用新型采用以下技术方案:
[0007]
一种行走式油菜菜苔采收机,包括安装板和行走机构,所述安装板上安装有机械手,所述机械手的活动端安装有用于夹持油菜菜苔并对油菜菜苔进行切割的夹取切割机构,所述安装板固装在行走机构上。
[0008]
作为上述技术方案的进一步改进:
[0009]
所述夹取切割机构包括夹取组件和切割组件,所述夹取组件和切割组件均安装在机械手的活动端、且切割组件位于夹取组件的下方。
[0010]
所述夹取组件包括夹取驱动件、安装台、夹取连杆组和一对夹爪,所述安装台与机械手铰接,所述夹取连杆组安装在安装台的下方,所述夹取驱动件一端与机械手的活动端铰接、另一端与夹取连杆组连接,一对所述夹爪与夹取连杆组连接,所述切割组件与安装台连接。
[0011]
所述夹取连杆组包括夹取固定杆、一对第一夹取连杆和一对第二夹取连杆,所述夹取固定杆与夹取驱动件的输出端连接,一对第一夹取连杆均与夹取固定杆活动铰接,一对第二夹取连杆分别与相应的第一夹取连杆活动铰接,一对夹爪分别与相应的第二夹取连杆连接,一对第二夹取连杆分别与安装台活动铰接。
[0012]
所述夹取固定杆上设有接头,所述接头与夹取驱动件的输出端连接。
[0013]
所述安装台上布置有多个铰接孔,相应侧的第二夹取连杆与相应的铰接孔活动铰
接。
[0014]
所述切割组件包括固定台、切割驱动件、切割连杆组和割刀,所述切割驱动件通过固定台安装在机械手的活动端,所述切割连杆组与切割驱动件的输出端以及固定台连接,切割连杆组还与安装台连接,所述割刀与切割连杆组活动铰接。
[0015]
所述切割连杆组包括切割固定杆、第一切割连杆、第二切割连杆和摆杆,所述切割固定杆与安装台连接,所述第一切割连杆的两端分别与切割固定杆以及固定台活动铰接,所述第二切割连杆的一端与切割固定杆活动铰接、另一端与割刀活动铰接,所述摆杆的两端分别与切割驱动件的输出端以及割刀活动铰接。
[0016]
所述固定台与机械手的活动端活动铰接。
[0017]
所述机械手包括第一机械臂和第二机械臂,所述第一机械臂与安装板活动铰接,所述第二机械臂与第一机械臂活动铰接,所述夹取驱动件和切割组件均与第二机械臂端部连接,所述第一机械臂与安装板之间铰接有第一驱动件,所述第二机械臂与第一机械臂之间铰接有第二驱动件,所述第二机械臂与安装台之间铰接有第三驱动件。
[0018]
所述行走机构包括车架和安装在所述车架上的行走轮,所述安装板固装在车架上。
[0019]
所述车架上在靠近夹爪的一端装设有用于收集油菜菜苔的收集机构。
[0020]
所述收集机构包括收集箱、支撑架和滑道,所述收集箱和支撑架均固装在车架上,所述滑道固装在支撑架上并伸至收集箱内。
[0021]
与现有技术相比,本实用新型的优点在于:
[0022]
本实用新型行走式油菜菜苔采收机,包括安装板和行走机构,安装板上安装有机械手,机械手的活动端安装有用于夹持油菜菜苔并对油菜菜苔进行切割的夹取切割机构,安装板固装在行走机构上。使用时,由行走机构行进至采收点,由机械手带动夹取切割机构到达指定位置,夹取切割机构先对油菜菜苔进行夹持固定,然后夹取切割机构对油菜菜苔进行切割,最后由机械手带动夹取切割机构将切割好的油菜菜苔取至收集位置,夹取切割机构松开,油菜菜苔自然落至收集点。较传统采收方式而言,该采收机结构简单紧凑,利用夹取切割机构同时实现了对油菜菜苔的夹取和切割,不需要额外的装置配合,降低了操作难度和成本,大大提高了采收效率;行走机构能行进各采收点,提高了使用的灵活性。
附图说明
[0023]
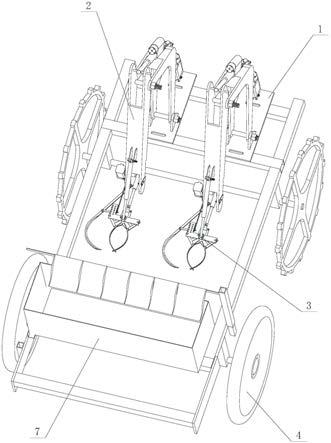
图1是本实用新型行走式油菜菜苔采收机的立体结构示意图。
[0024]
图2是本实用新型行走式油菜菜苔采收机的主视结构示意图。
[0025]
图3是图2的局部放大结构示意图。
[0026]
图4是本实用新型行走式油菜菜苔采收机中机械手的结构示意图。
[0027]
图5是本实用新型行走式油菜菜苔采收机中夹取切割机构的结构示意图。
[0028]
图中各标号表示:
[0029]
1、安装板;2、机械手;21、第一机械臂;22、第二机械臂;23、第三驱动件;3、夹取切割机构;31、夹取组件;311、夹取驱动件;312、安装台;3121、铰接孔;313、夹取连杆组;3131、夹取固定杆;31311、接头;3132、第一夹取连杆;3133、第二夹取连杆;314、夹爪;32、切割组件;321、固定台;322、切割驱动件;323、切割连杆组;3231、切割固定杆;3232、第一切割连
杆;3233、第二切割连杆;3234、摆杆;324、割刀;4、行走机构;41、车架;42、行走轮;5、第一驱动件;6、第二驱动件;7、收集机构;71、收集箱;72、支撑架;73、滑道。
具体实施方式
[0030]
以下将结合说明书附图和具体实施例对本实用新型做进一步详细说明。
[0031]
图1至图5示出了本实用新型行走式油菜菜苔采收机的一种实施例,包括安装板1和行走机构4,安装板1上安装有机械手2,机械手2的活动端安装有用于夹持油菜菜苔并对油菜菜苔进行切割的夹取切割机构3,安装板1固装在行走机构4上。使用时,由行走机构4行进至采收点,由机械手2带动夹取切割机构3到达指定位置,夹取切割机构3先对油菜菜苔进行夹持固定,然后夹取切割机构3对油菜菜苔进行切割,最后由机械手2带动夹取切割机构3将切割好的油菜菜苔取至收集位置,夹取切割机构3松开,油菜菜苔自然落至收集点。较传统采收方式而言,该采收机结构简单紧凑,利用夹取切割机构3同时实现了对油菜菜苔的夹取和切割,不需要额外的装置配合,降低了操作难度和成本,大大提高了采收效率;行走机构4能行进各采收点,提高了使用的灵活性。
[0032]
本实施例中,安装板1和机械手2均设置有一对,能提高采收效率。
[0033]
本实施例中,夹取切割机构3包括夹取组件31和切割组件32,夹取组件31和切割组件32均安装在机械手2的活动端、且切割组件32位于夹取组件31的下方。该结构中,夹取组件31和切割组件32实现了独立动作,保证了夹取定位和切割的精准性,实现采收菜苔大小趋于一致,还降低了对菜苔的损伤。
[0034]
本实施例中,夹取组件31包括夹取驱动件311、安装台312、夹取连杆组313和一对夹爪314,安装台312与机械手2铰接,夹取连杆组313安装在安装台312的下方,夹取驱动件311一端与机械手2的活动端铰接、另一端与夹取连杆组313连接,一对夹爪314与夹取连杆组313连接,切割组件32与安装台312连接。该结构中,由夹取驱动件311驱动夹取连杆组313带动一对夹爪314作收拢和展开动作,从而实现对菜苔的夹持和松开动作,其结构简单巧妙。
[0035]
本实施例中,夹取驱动件311设置为气缸,在其它实施例中,还可以设置为油缸等伸缩驱动件。
[0036]
本实施例中,夹取连杆组313包括夹取固定杆3131、一对第一夹取连杆3132和一对第二夹取连杆3133,夹取固定杆3131与夹取驱动件311的输出端连接,一对第一夹取连杆3132均与夹取固定杆3131活动铰接,一对第二夹取连杆3133分别与相应的第一夹取连杆3132活动铰接,一对夹爪314分别与相应的第二夹取连杆3133连接,一对第二夹取连杆3133分别与安装台312活动铰接。该结构中,由夹取驱动件311推拉夹取固定杆3131,夹取固定杆3131带动第一夹取连杆3132收拢和展开,第一夹取连杆3132再带动第二夹取连杆3133收拢和展开,第二夹取连杆3133再带动一对夹爪314收拢和展开,从而实现菜苔的夹持和松开动作。
[0037]
本实施例中,夹取固定杆3131上设有接头31311,接头31311与夹取驱动件311的输出端连接。该接头31311的设置实现了夹取固定杆3131与夹取驱动件311的快速连接,提高了拆装的方便性。
[0038]
本实施例中,安装台312上布置有多个铰接孔3121,相应侧的第二夹取连杆3133与
相应的铰接孔3121活动铰接。多个铰接孔3121的设置,使得第二夹取连杆3133可以调整到适合的位置后再与安装台312形成铰接,从而使一对夹爪314的开度可调整,以适应不同尺寸的菜苔,大大提高了其适用能力。
[0039]
本实施例中,切割组件32包括固定台321、切割驱动件322、切割连杆组323和割刀324,切割驱动件322通过固定台321安装在机械手2的活动端,切割连杆组323与切割驱动件322的输出端以及固定台321连接,切割连杆组323还与安装台312连接,割刀324与切割连杆组323活动铰接。该结构中,由切割驱动件322驱动切割连杆组323动作,切割连杆组323带动割刀324作切割动作,从而实现菜苔切割。
[0040]
本实施例中,夹切割驱动件322设置为步进电机,在其它实施例中,还可以设置为伺服电机等旋转驱动件。
[0041]
本实施例中,切割连杆组323包括切割固定杆3231、第一切割连杆3232、第二切割连杆3233和摆杆3234,切割固定杆3231与安装台312连接,第一切割连杆3232的两端分别与切割固定杆3231以及固定台321活动铰接,第二切割连杆3233的一端与切割固定杆3231活动铰接、另一端与割刀324活动铰接,摆杆3234的两端分别与切割驱动件322的输出端以及割刀324活动铰接。该结构中,第一切割连杆3232与切割固定杆3231以及固定台321形成竖向铰接,即使得安装台312在竖向方向能实现摆动,从而实现夹爪314在竖向方向具有一定的调节功能,提高了夹持定位的精准性;由切割驱动件322的旋转再加上第二切割连杆3233和摆杆3234的配合作用,实现割刀324的摆动,从而实现菜苔切割。
[0042]
本实施例中,固定台321与机械手2的活动端活动铰接。在安装台312竖向摆动时,会带动固定台321摆动,从而保证割刀324与夹爪314的相对位置。
[0043]
本实施例中,机械手2包括第一机械臂21和第二机械臂22,第一机械臂21与安装板1活动铰接,第二机械臂22与第一机械臂21活动铰接,夹取驱动件311和切割组件32均与第二机械臂22端部连接,第一机械臂21与安装板1之间铰接有第一驱动件5,第二机械臂22与第一机械臂21之间铰接有第二驱动件6,第二机械臂22与安装台312之间铰接有第三驱动件23。该结构中,通过第一机械臂21、第二机械臂22、第一驱动件5、第二驱动件6和第三驱动件23的配合,实现了类似关节的结构,大大提高了在采收时的灵活性。
[0044]
本实施例中,第一驱动件5、第二驱动件6和第三驱动件23设置为气缸,在其它实施例中,还可以设置为油缸等伸缩驱动件。
[0045]
本实施例中,行走机构4包括车架41和安装在车架41上的行走轮42,安装板1固装在车架41上。该结构中,车架41为整体的安装和支撑基础,行走轮42为整体提供行进,其结构简单可靠。
[0046]
本实施例中,车架41上在靠近夹爪314的一端装设有用于收集油菜菜苔的收集机构7。该收集机构7能够及时接收夹爪314上被的油菜菜苔,便于批量采收,其结构简单,提高了采收效率。
[0047]
本实施例中,收集机构7包括收集箱71、支撑架72和滑道73,收集箱71和支撑架72均固装在车架41上,滑道73固装在支撑架72上并伸至收集箱71内。采收时,被切割后的菜苔由夹爪314夹取到滑道73上方,然后夹爪314松开,菜苔落至滑道73上,再从滑道73滚至收集箱71内,该滑道73设置能够缓冲夹爪314松开后菜苔的下落力,避免对菜苔造成损伤,其结构简单、设计巧妙。
[0048]
虽然本实用新型已以较佳实施例揭示如上,然而并非用以限定本实用新型。任何熟悉本领域的技术人员,在不脱离本实用新型技术方案范围的情况下,都可利用上述揭示的技术内容对本实用新型技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本实用新型技术方案的内容,依据本实用新型技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本实用新型技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1