一种有害生物智能识别自动分拣装置的制作方法
1.本发明涉及林业害虫识别防治技术领域,具体涉及一种有害生物智能识别自动分拣装置。
背景技术:
2.现有技术中,在林业害虫防治中,识别林业中昆虫的种类非常的关键,当识别确认林业中害虫的种类时,才能够更好的对症下药,达到防治害虫的目的;现有技术中的这些用于昆虫识别的设备中,多是通过捕虫设备将昆虫捕捉后,人工拍照识别,或者将照片上传至云端数据库通过应用程序进行识别;首先这种技术不能达到实时拍摄智能识别的目的,另外就是捕虫设备中每隔一段时间虫子会很多,这样再进行人工拍照设备,会非常的耗时耗力,不能达到智能识别的目的。
技术实现要素:
3.本发明的目的是针对现有技术存在的不足,提供一种有害生物智能识别自动分拣装置,其技术方案如下:
4.一种有害生物智能识别自动分拣装置,包括设置在前端设置的捕虫通道,该捕虫通道内的侧壁处相应安装有捕虫感应器;而捕虫通道的后方设置一捕虫筒体,该捕虫筒体的下端安装有第一伺服电机,可相应带动捕虫筒体旋转;并且所述的捕虫筒体的筒壁上设置有与捕虫通道位置对应的开口,并且捕虫筒体的筒壁上还设置有两排对称设置的推进槽,两排推进槽均间隔均匀的设置有若干个,并且其中一排推进槽尾端的位置与开口的设置位置重叠,并且所述捕虫筒体的上方还设置有一分离的筒盖,该筒盖上安装有摄像装置,拍摄方向相应对准捕虫筒体内;所述的捕虫筒体的后方还设置有第二伺服电机,该伺服电机上安装有一可相应旋转的片板,该片板的下端面则安装有弧形的推进板,所述的捕虫筒体与筒盖之间留有与片板位置对应的片板间隙,并且设置推进槽的形状与推进板的形状相匹配;捕虫筒体的开口与捕虫通道的位置对应;捕虫筒体的开口与收集箱的位置对应。
5.作为优选,当两组捕虫感应器同时感应到有昆虫进入到捕虫筒体内时,第一伺服电机相应带动捕虫筒体旋转,旋转后,两排推进槽的位置以捕虫通道为中心线对称,捕虫通道相应被捕虫筒体的筒壁堵住,昆虫被拦截在捕虫筒体中,此时通过上方筒盖安装的摄像装置对进入的昆虫进行拍照,每隔一段时间拍摄一次,拍摄完设定的照片数量后;捕虫筒体上的开口相应旋转到与收集箱对应的另一位置,在该位置处捕虫筒体的开口位置对应自动分拣装置,并且在该位置处,所述的第二伺服电机可相应带动片板从片板间隙穿过,片板上的推进板依次从一侧的推进槽穿过进入到捕虫筒体内,又从另一侧的推进槽穿过,从而将捕虫筒体内的昆虫从开口驱赶出去,驱赶完毕后,捕虫筒体的开口位置重新旋转对应感应器等待新的昆虫进入。
6.作为优选,所述的自动分拣装置包括竖直第三伺服电机15,该第三伺服电机15上通过连杆13安装有若干个间隔均匀的收集箱14,通过第三伺服电机15 可带动四个收集箱
14旋转,分别旋转至与开口5位置对应处,从捕虫筒体3驱赶出来的昆虫从开口5进入到收集箱14中。
7.作为优选,所述的捕虫筒体3上每一侧的推进槽6均设置有十个,对应片板 10上的推进板11同样设置有十个,推进槽6与推进板11设置为对应的矩形形状的犬牙交错结构,并且内部间隙以及片板间隙12均小于所要识别的昆虫的大小体积。
8.作为优选,所述的片板10上的推进板11穿过推进槽6进入到捕虫筒体3 后,前端的推进板11与捕虫筒体3的前端筒壁的空隙小于昆虫的大小体积,以及后端的推进板11与捕虫筒体3后端筒壁的空隙小于昆虫的大小体积;以及此时开口5的位置处于捕虫筒体3后侧位置,保证昆虫能够被驱赶到开口5处。
9.作为优选,所述捕虫通道1内安装有两排捕虫感应器2,且所述的捕虫感应器2相应设置为可感应温度的红外感应器。
10.有益效果:本发明与现有技术相比具有以下有益效果:本装置可实现对进入到捕虫筒体内的昆虫实时拍照识别,并且拍照后驱逐以及驱逐分类分拣的功能;捕虫感应器感应到有昆虫进入时,第一伺服电机可相应带动捕捉筒体旋转,将开口堵住,之后摄像装置进行拍照并上传照片进行识别,而之后通过设置的带有推进板的片板进入到捕捉筒体内对昆虫进行驱赶,可直接将昆虫驱赶放生,也可以将昆虫直接驱赶进入到分拣箱内,并且本装置中分拣箱可以根据识别的结果选择不同的分拣箱与开口的位置对应,实现不用类别的昆虫的分拣捕捉,整体结构十分的合理,用于驱赶昆虫的片板、片板上的推进板以及捕捉筒体上的推进槽的设置十分的巧妙,在转动合适的角度后,可以实现片板上推进板自由的从推进槽进出,实现驱赶昆虫的目的,结构合理巧妙,使用方便。
附图说明
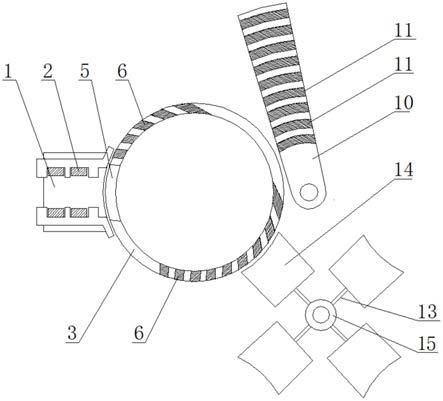
11.图1为本发明结构示意图;
12.图2为图1俯视图;
13.图3为图1中捕捉筒体旋转后开口位置图;
14.图4为片板旋转进入捕捉筒体时的示意图;
15.图5为片板旋转进入到捕捉筒体内的示意图;
16.图6为片板旋转到开口时的示意图。
具体实施方式
17.下面结合附图和具体实施例,进一步阐明本发明,本实施例在以本发明技术方案为前提下进行实施,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
18.如图1所示,一种有害生物智能识别自动分拣装置,包括设置在前端设置的捕虫通道1,该捕虫通道1内的侧壁处相应安装有捕虫感应器2;而捕虫通道1 的后方设置一捕虫筒体3,该捕虫筒体3的下端安装有第一伺服电机4,可相应带动捕虫筒体3旋转;并且所述的捕虫筒体3的筒壁上设置有与捕虫通道1位置对应的开口5,并且捕虫筒体3的筒壁上还设置有两排对称设置的推进槽6,两排推进槽6均间隔均匀的设置有若干个,并且其中一排推进槽6尾端的位置与开口5的设置位置重叠,并且所述捕虫筒体3的上方还设置有一分离的筒盖7,该筒盖7上安装有摄像装置8,拍摄方向相应对准捕虫筒体3内;所述的捕虫筒体 3的后方还
设置有第二伺服电机9,该伺服电机上安装有一可相应旋转的片板10,该片板10的下端面则安装有弧形的推进板11,所述的捕虫筒体3与筒盖7之间留有与片板10位置对应的片板间隙12,并且设置推进槽6的形状与推进板11 的形状相匹配;捕虫筒体3的开口5与捕虫通道1的位置对应;捕虫筒体3的开口5与收集箱14的位置对应。
19.当两组捕虫感应器2同时感应到有昆虫进入到捕虫筒体3内时,第一伺服电机4相应带动捕虫筒体3旋转,旋转后,两排推进槽6的位置以捕虫通道1为中心线对称,捕虫通道1相应被捕虫筒体3的筒壁堵住,昆虫被拦截在捕虫筒体3 中,此时通过上方筒盖7安装的摄像装置8对进入的昆虫进行拍照,每隔一段时间拍摄一次,拍摄完设定的照片数量后;捕虫筒体3上的开口5相应旋转到与收集箱14对应的另一位置,在该位置处捕虫筒体3的开口5位置对应自动分拣装置,并且在该位置处,所述的第二伺服电机9可相应带动片板10从片板间隙12 穿过,片板10上的推进板11依次从一侧的推进槽6穿过进入到捕虫筒体3内,又从另一侧的推进槽6穿过,从而将捕虫筒体3内的昆虫从开口5驱赶出去,驱赶完毕后,捕虫筒体3的开口5位置重新旋转对应感应器等待新的昆虫进入。
20.所述的自动分拣装置包括竖直第三伺服电机15,该第三伺服电机15上通过连杆13安装有若干个间隔均匀的收集箱14,通过第三伺服电机15可带动四个收集箱14旋转,分别旋转至与开口5位置对应处,从捕虫筒体3驱赶出来的昆虫从开口5进入到收集箱14中。
21.所述的捕虫筒体3上每一侧的推进槽6均设置有十个,对应片板10上的推进板11同样设置有十个,推进槽6与推进板11设置为对应的矩形形状的犬牙交错结构,并且内部间隙以及片板间隙12均小于所要识别的昆虫的大小体积。
22.所述的片板10上的推进板11穿过推进槽6进入到捕虫筒体3后,前端的推进板11与捕虫筒体3的前端筒壁的空隙小于昆虫的大小体积,以及后端的推进板11与捕虫筒体3后端筒壁的空隙小于昆虫的大小体积;以及此时开口5的位置处于捕虫筒体3后侧位置,保证昆虫能够被驱赶到开口5处。
23.所述捕虫通道1内安装有两排捕虫感应器2,且所述的捕虫感应器2相应设置为可感应温度的红外感应器。
24.如图2所示,在原始位置时,捕虫筒体上的开口与捕虫通道的位置是对应的,为了便于昆虫的进入,捕虫筒体内可喷洒或放置吸引昆虫的物质,吸引昆虫从捕虫通道内进入到捕虫筒体内,并且在进入的同时,捕虫感应器感应到昆虫进入后,第一伺服电机会相应带动捕虫筒体旋转,旋转时可以先旋转一个小角度,使捕虫筒体的筒壁将捕虫通道堵住,另外在捕虫通道的外侧设置弧形伸长的挡板,将捕虫筒体上的开口位置也堵住,或者直接在捕虫筒体的外侧设置挡板均可将开口堵住,但是挡板的设置不能妨碍片板的运行,这样昆虫就被限制在捕虫筒体内,之后通过筒盖上安装的摄像装置进行拍摄,拍摄的照片会自动上传至数据库进行比对,从而能够快速识别该类昆虫的种类。
25.如图3所示,之后第一伺服电机是控制捕虫筒体旋转至图3中位置,图3 中,两侧的推进槽的位置设置是以捕虫通道为中心线对称设置的,这样才能保证片板上的推进板是与两侧的推进槽的位置是对应的,推进板才能严丝合缝的自由的从推进槽中穿过和穿出,对捕捉筒体内的昆虫进行驱赶;并且本装置还会根据识别后的昆虫的类型进行不同的选择,如果识别到该昆虫为益虫,则可以通过推进板直接将昆虫从开口处驱赶出去,不进行捕捉。
26.但是基本上林业树木中所捕捉到的都是害虫,因此本装置在图3中开口的位置处
相应设置自动分拣装置,自动分拣装置是通过第三伺服电机通过安装连杆带动四个分拣箱实现,分拣箱的设置位置是与图3中开口的位置是对应的,并且根据拍摄装置拍摄后识别的结果确定该害虫的种类,每一分拣箱均可容纳捕捉不同类型的害虫,因此在图2的位置时,当确定害虫种类的时候,第三伺服电机就相应带动分拣箱旋转到图3指定的位置,之后第二伺服电机再带动捕捉筒体旋转到图3中与分拣箱位置对应处,之后进行昆虫的驱赶。
27.如图4、图5、图6所示,第二伺服电机带动片板旋转,片板从外侧穿过片板间隙、片板上的推进板从外侧穿过推进槽进入到捕虫筒体内,片板上的推进板尽可能设置较薄以及上方的片板间隙均要设置较小,这样才能防止筒体内的昆虫从这些空隙内跑出,另外片板上的推进板的总长度要设置较长,这样才能覆盖捕捉筒体内的大部分空间,并且开口的位置要设置在后端,才能逐渐的压缩昆虫的活动空间,直到最后顺利的将昆虫从开口处驱赶到分拣箱内;并且在图6中,当片板到达图6中的位置时,如果没有设置分拣箱,片板可以直接穿过推进槽到外侧,而当设置分拣箱,有分拣箱阻挡时,可控制片板原路返回,之后第一伺服电机控制捕捉筒体复位,即可进行下一次昆虫的捕捉拍摄识别以及驱赶分拣的过程。
28.本装置工作时还需要另外设置处理器以及控制设备,处理器和控制设备等通过编程操作可相应控制三个伺服电机的开启和关闭以及行程等,并且可以接收红外感应器的感应信号,控制摄像装置进行拍照,并接收照片信息,上传对比等;另外本装置中的与开口位置的分拣箱也可设置成对应的箱盖可自动开合关闭的箱体结构,可通过箱盖电机等设置,在昆虫驱赶的时候,箱盖打开,驱赶完毕后,箱盖直接关闭,以及可以将分拣箱设置为长条的袋装结构,驱赶后昆虫直接进入到长条的袋体内,昆虫不易飞出去;上述技术结构并未在图中具体画出,但是本领域的技术人员可以根据本文的描述以及附图的内容实现。
29.以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1