基于机器视觉的大蒜定向播种装置及方法
1.本申请涉及农业机械技术领域,具体涉及一种基于机器视觉的大蒜定向播种装置及方法。
背景技术:
2.我国每年的大蒜年产量日益增加,常年种植面积为1000余万亩,超过世界大蒜栽植面积的60%以上,占世界大蒜种植面积的三分之二,大蒜已经成为我国重要的经济作物。我国种植的大蒜除供应本国的大众消费外,外贸出口量也占据重要地位,大部分的产品远销俄罗斯,日本等国外地区。大蒜播种时需要满足蒜种鳞芽朝上的种植农艺要求,研究资料表明,蒜种鳞芽朝下和水平播种后会对成熟大蒜的产量及品质产生不良影响。
3.目前国内市场存在一些大蒜播种机械,能够通过一定的机械结构对一些外形较为规则,鳞芽具有“直、长、硬”特征的“苍山”大蒜进行蒜种鳞芽定向播种,但是针对于蒜种鳞芽短、弯曲,形状不规则,且存在夹瓣导致重心位置不规则的“金乡”大蒜难以进行定向播种,“金乡”大蒜相对于“苍山”大蒜种植面积大,分布范围更广阔。
4.但是针对“金乡”大蒜不规则的外形以及缺少有效的大蒜鳞芽方向识别方法和定向播种装置,使得目前我国以“金乡”大蒜为特征的大蒜种植仍以人工种植为主,劳动强度大,作业效率低,严重制约和影响了大蒜机械化播种作业。
技术实现要素:
5.本申请为了解决上述技术问题,提出了如下技术方案:
6.第一方面,本申请实施例提供了一种基于机器视觉的大蒜定向播种装置,包括:拨种排种装置,所述拨种排种装置的蒜种出口连接蒜种传输通道的第一端,所述蒜种传输通道的第二端设置在蒜种特征识别及定向播种机构的蒜种进口,对应所述蒜种特征识别及定向播种机构的正上方设置有图像采集器,所述图像采集器的图像采集端朝向所述蒜种特征识别及定向播种机构内,用于采集蒜种的姿态信息照片,所述蒜种特征识别及定向播种机构根据所述姿态信息照片对蒜种姿态进行识别和调整。
7.采用上述实现方式,可以一次性完成大蒜二次拨种排种,蒜种定向有序传输,图像识别以及定向播种,满足了蒜种鳞芽朝上的种植农艺要求,集约化的设计大幅度减少自身所占的空间和体积,整体性强,满足了大蒜机械化、智能化播种。
8.结合第一方面,在第一方面第一种可能的实现方式中,所述拨种排种装置包括拨种排种装置外壳和柔性播种轮,所述柔性播种轮通过电控系统传动轴活动设置在所述拨种排种装置外壳内。
9.结合第一方面第一种可能的实现方式,在第一方面第二种可能的实现方式中,所述拨种排种装置外壳包括拨种排种装置内腔、开口通孔、弧形护种面和过渡连接弧面,其中拨种排种装置内腔中安装所述柔性拨种轮和电控系统传动轴,电控系统传动轴连接在开口通孔处,实现柔性拨种轮的转动控制;所述弧形护种面的尺寸范围大于所述柔性拨种轮整
体尺寸,实现柔性拨种轮在排出蒜种的过程中对蒜种的保护作用,避免蒜种在惯性力的作用下飞出界外。所所述过渡连接弧面为拨种排种装置与蒜种传输通道的连接过渡曲面,保证经过柔性拨种轮排出的蒜种顺利滑移至蒜种传输通道。
10.结合第一方面第二种可能的实现方式,在第一方面第三种可能的实现方式中,所述柔性拨种轮包括中心连接轴和柔性拨种叶片,所述柔性拨种轮主要材料可以选择硅胶或橡胶,保证在拨种排种过程中减少对蒜种的损伤,实现柔性排种。所述柔性拨种叶片的边线由内凹形圆弧和外凸形圆弧组合而成,整体圆周形成弧形切斜分种曲线,以使得相邻两柔性拨种叶片间形成喇叭口状分种空间,充分利用柔性拨种轮投送分种作用,以二次投种方式减小或抵消蒜种落入蒜种传输通道瞬间的相对速度,调整缓冲下落过程中蒜种轨迹及速度,实现蒜种的平稳投送,将蒜种接引至蒜种传输通道内稳定滑移。所述电控系统传动轴通过中心连接轴装配在拨种排种装置外壳上。可以通过配套电控传动系统(包括电源适配器及自编程序控制器)独立驱动柔性拨种轮以固定转动比例实现从单粒取种装置中下落蒜种的同步传动。
11.结合第一方面第二或三种可能的实现方式,在第一方面第四种可能的实现方式中,所述蒜种传输通道为v型传输通道,包括:v型凹槽,所述过渡连接弧面与所述v型凹槽的第一端相连接,所述v型凹槽的第二端与所述蒜种特征识别及定向播种机构的进口相连接,所述v型凹槽的v型夹角为45
‑
60
°
;所述v型凹槽的v型夹角做圆角处理形成弧形圆角,所述v型凹槽侧壁上设置不对称圆形凸起。所述v型凹槽的设计可由其横截面沿蒜种下落路径扫描成型,经柔性拨种轮排出的蒜种顺利滑移至v型传输通道后,蒜种可以在v型传输通道内平稳滑移,减少蒜种弹跳、翻滚等现象;由于蒜种的头尾的质量有较为明显的差别、且充分考虑到蒜种质心分布特点,v型凹槽的v型夹角设计满足45
‑
60
°
最为适宜,同时为避免出现尖锐边角,将v型凹槽按照设计的v型夹角做相对应的圆角处理,形成上述弧形圆角。为了让沿v型凹槽下落的蒜种可以实现蒜种有序(纵向滑移)运动至蒜种特征识别及定向播种机构,v型传输通道需要设计一定的长度以及在v型凹槽侧壁上设置不对称圆形凸起,v型传输通道的长度设计保证蒜种有一定的自身调节的时间,因此确定v型传输通道长度满足5
‑
20cm的设计范围,不对称圆形凸起保证了蒜种接触后产生一个旋转力矩,蒜种由横向向下传输变为纵向向下传输,保证蒜种纵向有序滑移。所述v型凹槽的第二端设置有第一连接板和第二连接板,为防止蒜种在v型传输通道内出现卡滞现象,v型传输通道与蒜种特征识别及定向播种机构的安装夹角范围应满足大于v型传输通道与蒜种的摩擦角。所述第一连接板与安装架的安装支撑连接,用于确定最佳的传输角度,确定安装角度范围为60
‑
80
°
,第二连接板通过螺栓螺母与安装架固定连接。
12.结合第一方面第四种可能的实现方式,在第一方面第五种可能的实现方式中,所述蒜种特征识别及定向播种机构包括y型料斗、翻转安装支架、张紧弹簧、翻转驱动舵机、开合驱动舵机、连接圆盘、翻转驱动舵机固定轴、开合驱动舵机固定轴和开合挡板;所述y型料斗包括第一y型料斗和第二y型料斗,所述第一y型料斗和第二y型料斗采用非对称组合活动安装,非对称组合的结构可有效保证大蒜进入y型料斗后处于直立状态,从而确保了大蒜鳞芽识别的准确率和鳞芽调整的成功率。开合驱动舵机通过开合驱动舵机固定轴与翻转安装支架固定连接,开合驱动舵机的驱动轴与开合挡板固定连接,所述开合挡板设置在所述第一y型料斗和第二y型料斗之间的连接缝隙处,当舵机驱动时带动开合挡板旋转,从而完成y
形料斗的开合。同时开合挡板尾端固定连接在开合驱动舵机的输出端,由开合驱动舵机带动开合挡板做旋转运动,同时施加给第一y型料斗,第二y型料向外打开的力,完成料斗的打开。所述张紧弹簧两端分别连接所述第一y型料斗和第二y型料斗,所述张紧弹簧用于连接第一y型料斗和第二y型料斗的支撑连接板,主要用于实现y型料斗自然状态下的拉紧作用以及在开合挡板作用打开后y型料斗的复位作用。翻转驱动舵机通过与螺栓螺母与安装架固定连接,翻转舵机驱动轴与连接圆盘固定连接并由翻转驱动舵机固定轴与翻转安装支架固定连接。当翻转舵机驱动时,以安装架为固定支点,带动y型料斗,翻转安装支架以及开合驱动舵机同步做翻转运动。
13.结合第一方面第五种可能的实现方式,在第一方面第六种可能的实现方式中,第一y型料斗包括:第一支撑挡板和第一料斗舱体,所述第一翻转支撑挡板上设置有第一翻转轴和第一张紧弹簧连接孔,所述第一y型料斗通过所述第一翻转轴与所述翻转安装支架转动连接,所述第一张紧弹簧连接孔与所述张紧弹簧的第一端固定连接;所述第一料斗舱体包括一锥形弧面,所述锥形弧面设置有弧面挡板所述锥形弧面连接第一圆柱形通道,所述第一圆柱形通道连接第一锥形通道;所述锥形通道一侧设置第一翻转支撑挡板,对应所述第一张紧弹簧连接孔设置第一弹簧连接通孔。
14.结合第一方面第六种可能的实现方式,在第一方面第七种可能的实现方式中,所述第二y型料斗包括:第二支撑挡板和第二料斗舱体,所述第二翻转支撑挡板上设置第二张紧弹簧连接孔,所述第二张紧弹簧连接孔与所述张紧弹簧的第二端固定连接;所述第二料斗舱体上设置第二翻转轴,所述第二y型料斗通过所述第二翻转轴与所述翻转安装支架转动连接;所述第二料斗舱体设置有引导凹槽,所述引导凹槽的两端设置有滑移面,所述引导凹槽连接第二圆柱形通道,所述第二圆柱形通道连接第二锥形通道;所述第二料斗舱体一侧设置第二翻转支撑挡板,所述第二翻转支撑挡板设置第二弹簧连接通孔。
15.所述第一翻转轴和第二翻转分别安装于翻转安装支架一侧的通孔处,通过长螺栓连接,第一y型料斗,第二y型料依次安装位置水平对接。所述第一张紧弹簧连接孔和第二张紧弹簧连接孔分别开设在第一翻转支撑挡板和第二翻转支撑挡板上,用于实现张紧弹簧的安装,保证第一y型料斗和第二y型料间拉紧及复位作用。张紧弹簧可以穿过第一弹簧连接通孔和第二弹簧连接通孔实现连接,所述第一弹簧连接通孔和第二弹簧连接通孔具有保证在料斗打开及闭合的过程中对弹簧干涉作用减小,提高装置可靠性的作用。所述第一翻转支撑挡板和第二翻转支撑挡板一方面用于实现料斗整体结构稳定性,另一方面用于实现开合挡板对第一翻转支撑挡板和第二翻转支撑挡板施加作用力,从而保证料斗顺利打开。所述引导凹槽用于实现蒜种从v型传输通道下落至承第一y型料斗,v型传输通道能够有效实现蒜种的纵向滑移,纵向滑移的蒜种经引导凹槽落入承接斗,同时具有将蒜种从承接斗中引导排出的作用,引导凹槽的尺寸设计应该满足凹槽宽度应该大于等于所测蒜种的宽度或厚度的最大值小于蒜种的长度的最大值。所述滑移面为一种凹型面,用于实现从v型传输通道滑移后那些未经引导凹槽传输的蒜种经凹型面可以有效落入承接斗;第一圆柱形通道和第一锥形通道组成第一承接斗,第二圆柱形通道和第二锥形通道组成第二承接斗,第一承接斗和第二承接斗采用非对称组合的方式,即第一承接斗和第二承接斗之间有一定的高度差(第一圆柱形通道和第二圆柱形通道之间的长度的差值),非对称组合的方式可以实现蒜种的有效喂入并可以保持蒜种直立的姿态,所述第一圆柱形通道、第二圆柱形通道的长度
和直径是保证蒜种顺利落入和限制姿态的重要指标,因此设计第二圆柱形通道的长度范围为10
‑
30mm,高度差的设计范围为10
‑
20mm,第一圆柱形通道和第二圆柱形通道直径的设计范围为20~30mm。锥形通道是保持蒜种直立姿态的重要指标,设计第一锥形通道和第二锥形通道的锥度角范围为20
‑
45
°
。所述弧面挡板主要用于将第一y型料斗和第二y型料连接的缝隙遮挡,防止图像采集器采集的照片信息中含有缝隙,造成对蒜种鳞芽和根部特征识别不显著,甚至产生特征识别不成功的结果。
16.结合第一方面或第一方面第一至七种任一可能的实现方式,在第一方面第八种可能的实现方式中,所述蒜种特征识别及定向播种机构固定在安装支架上,所述安装支架用于连接农机设备,所述图像采集器通过图像采集器安装架固定在所述安装支架上,所述蒜种特征识别及定向播种机构的蒜种出口连接蒜种汇集传输料斗,用于实现定向调整后蒜种的汇集传输,完成蒜种定向播种。图像采集机位于蒜种特征识别及定向播种机构正上方,保证可以清晰的采集到蒜种的姿态信息照片,用以识别并进行蒜种的蒜根和鳞芽特征的识别及信息处理。所述图像采集器安装位置要高于v型蒜种传输通道与安装架的安装位置,保证从v型传输通道下落的蒜种不对图像采集器产生碰撞阻碍。
17.第二方面,本申请实施例提供了一种基于机器视觉的大蒜定向播种方法,采用第一方面或第一方面任一可能实现方式的基于机器视觉的大蒜定向播种装置,所述方法包括:s101,蒜种从单粒取种装置下落时,进入拨种排种装置,通过自编控制器,独立驱动柔性拨种轮以固定比例与排种器同步转动,所排出的蒜种经拨种轮反向分种,调整缓冲下落过程中蒜种轨迹及速度,将蒜种接引至v型传输通道轨道内稳定滑移,依据蒜种重心位置分布特点和v型传输通道的不对称圆形凸起,蒜种会呈现有序纵向滑移状态,直至有序落入蒜种特征识别及定向播种机构;s102,硬件系统以边缘计算处理器jetson nano为控制核心,由电源模块、摄像头、pca9685模块、翻转驱动舵机,开合驱动舵机成控制系统硬件;边缘计算处理器jetson nano用于边缘计算,进行图像分类、目标检测、分割和语音处理等领域,并且可并行运行多个神经网络;s103,当蒜种落入蒜种特征识别及定向播种机构,控制系统初始化后控制图像采集器对图像进行采集,然后利用利用大蒜检测网络模型对采集的图像进行推理,判断是背景图像还是大蒜图像,如果是背景图像则进行下一帧图像采集并继续判断;如果是大蒜图像,则将图像输入到鳞芽判断网络模型通过推理判断鳞芽的朝向,大蒜检测网络模型和鳞芽判断网络模型相互配合最终完成蒜种特征识别;大蒜检测模型主要对采集的图像进行实时处理,判断是否有蒜种喂入,是对背景图像和大蒜图像进行二分类问题,由于两种图像特征差异显著,采用5层卷积神经网络模型,前四层为四个由卷积层、relu层和池化层构成的卷积块,第5层为全连接层;大蒜鳞芽判断模型通过对大蒜图像进行推理,对大蒜鳞芽朝上或朝下进行而分类;大蒜鳞芽判断模型采用resnet
‑
18网络结构,通过迁移学习对网络参数进行训练;s104,经过图像识别后,根据蒜种特征的判别结果分别控制翻转驱动舵机,开合驱动舵机工作,驱动舵机的转动角度可以在0~180
°
内调节,当判别蒜种鳞芽朝上,开合驱动舵机工作,带动开合挡板实现第一y型料斗和第二y型料打开,蒜种自然下落,种体方向未变,落入蒜种汇集传输料斗,开合驱动舵机复位后,在复位弹簧的张紧作用下,第一y型料斗和第二y型料斗闭合;或者,当判别蒜种鳞芽朝下,翻转驱动舵机工作,带动整体做翻转运动,蒜种种体方向改变,落入蒜种汇集传输料斗,实现鳞芽调整。
附图说明
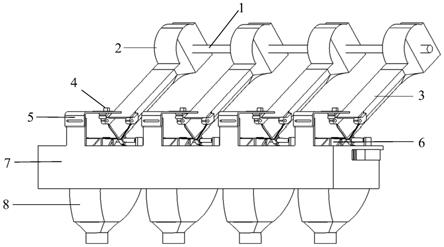
18.图1为本申请实施例提供的一种基于机器视觉的大蒜定向播种装置的结构示意图;
19.图2为本申请实施例提供的一种基于机器视觉的大蒜定向播种装置俯视图;
20.图3为本申请实施例提供的一种基于机器视觉的大蒜定向播种装置的侧视图;
21.图4为本申请实施例提供的拨种排种装置外壳的示意图;
22.图5为本申请实施例提供的柔性拨种轮的结构示意图;
23.图6为本申请实施例提供的蒜种传输通道的主视图;
24.图7为本申请实施例提供的蒜种传输通道的的立体图;
25.图8为本申请实施例提供的一种蒜种特征识别及定向播种机构的左视图;
26.图9为本申请实施例提供的一种蒜种特征识别及定向播种机构的俯视图;
27.图10为本申请实施例提供的一种蒜种特征识别及定向播种机构的主视图;
28.图11为本申请实施例提供的第一y型料斗的主视图;
29.图12为本申请实施例提供的第一y型料斗的右视图;
30.图13为本申请实施例提供的第一y型料斗的立体图;
31.图14为本申请实施例提供的第二y型料斗的主视图;
32.图15为本申请实施例提供的第二y型料斗的左视图;
33.图16为本申请实施例提供的第一y型料斗的立体图;
34.图17为本申请实施例提供的另一种蒜种特征识别及定向播种机构的轴视图;
35.图18为本申请实施例提供的另一种蒜种特征识别及定向播种机构的侧视图;
36.图19为本申请实施例提供的另一种蒜种特征识别及定向播种机构的内部图;
37.图20为本申请实施例提供的硬件控制系统的框架结构图;
38.图21为本申请实施例提供的图像识别控制算法流程示意图;
39.图22为本申请实施例提供的大蒜检测及鳞芽识别网络结构示意图;
40.图1
‑
22中,符号表示为:
[0041]1‑
电控系统传动轴,2
‑
拨种排种装置,3
‑
蒜种传输通道,4
‑
图像采集器,5
‑
图像采集器安装架,6
‑
蒜种特征识别及定向播种机构,7
‑
安装支架,8
‑
蒜种汇集传输料斗,201
‑
拨种排种装置外壳,202
‑
柔性播种轮,2011
‑
开口通孔,2012
‑
拨种排种装置内腔,2013
‑
弧形护种面,2014
‑
过渡连接弧面,2021
‑
中心连接轴,2022
‑
内凹形圆弧,2023
‑
外凸形圆弧,2024
‑
喇叭口状分种空间,301
‑
第一连接板,302
‑
v型凹槽,303
‑
不对称圆形凸起,304
‑
第二连接板,305
‑
弧形圆角,601
‑
第一y型料斗,602
‑
第二y型料斗,603
‑
翻转安装支架,604
‑
张紧弹簧,605
‑
翻转驱动舵机,606
‑
连接圆盘,607
‑
开合驱动舵机,608
‑
翻转驱动舵机固定轴,609
‑
开合驱动舵机固定轴,610
‑
开合挡板,6011
‑
第一支撑挡板,6012
‑
第一张紧弹簧连接孔,6013
‑
锥形弧面,6014
‑
第一翻转支撑挡板,6015
‑
第一弹簧连接通孔,6016
‑
第一圆柱形通道,6017
‑
第一锥形通道,6018
‑
第一翻转轴,6019
‑
弧面挡板,6021
‑
第二张紧弹簧连接孔,6022
‑
第二翻转支撑挡板,6023
‑
第二翻转轴,6024
‑
引导凹槽,6025
‑
滑移面,6026
‑
第二支撑挡板,6027
‑
第二圆柱形通道,6028
‑
第二锥形通道,6029
‑
第二弹簧连接通孔,901
‑
蒜种导入口,902
‑
蒜种导出口,903
‑
蒜种图像采集器,904
‑
定向翻转舵机,905
‑
固定连接板,906
‑
驱动方轴,907
‑
梯形定向翻转板。
具体实施方式
[0042]
下面结合附图与具体实施方式对本方案进行阐述。
[0043]
如图1
‑
3所示,本申请实施例提供的为本申请实施例提供的一种基于机器视觉的大蒜定向播种装置,包括:电控系统传动轴1和多个拨种排种装置2,多个拨种排种装置2通过所述电控系统传动轴1相连接。所述拨种排种装置2的蒜种出口连接蒜种传输通道3的第一端,所述蒜种传输通道3的第二端设置在蒜种特征识别及定向播种机构6的蒜种进口。对应所述蒜种特征识别及定向播种机构6的正上方设置有图像采集器4,所述图像采集器4的图像采集端朝向所述蒜种特征识别及定向播种机构6内,用于采集蒜种的姿态信息照片,所述蒜种特征识别及定向播种机构6根据所述姿态信息照片对蒜种姿态进行识别和调整。
[0044]
所述蒜种特征识别及定向播种机构6固定在安装支架7上,所述安装支架7用于连接农机设备,所述图像采集器4通过图像采集器安装架5固定在所述安装支架7上,所述蒜种特征识别及定向播种机构6的蒜种出口连接蒜种汇集传输料斗8,用于实现定向调整后蒜种的汇集传输,完成蒜种定向播种。图像采集机位于蒜种特征识别及定向播种机构6正上方,保证可以清晰的采集到蒜种的姿态信息照片,用以识别并进行蒜种的蒜根和鳞芽特征的识别及信息处理。所述图像采集器4安装位置要高于蒜种传输通道3与安装架的安装位置,保证从蒜种传输通道3下落的蒜种不对图像采集器4产生碰撞阻碍。
[0045]
所述拨种排种装置2包括拨种排种装置外壳201和柔性播种轮202,所述柔性播种轮202通过电控系统传动轴1活动设置在所述拨种排种装置外壳201内。
[0046]
参见图4,所述拨种排种装置外壳201包括拨种排种装置内腔2012、开口通孔2011、弧形护种面2013和过渡连接弧面2014,其中拨种排种装置内腔2012中安装所述柔性拨种轮和电控系统传动轴1,电控系统传动轴1连接在开口通孔2011处,实现柔性拨种轮的转动控制;所述弧形护种面2013的尺寸范围大于所述柔性拨种轮整体尺寸,实现柔性拨种轮在排出蒜种的过程中对蒜种的保护作用,避免蒜种在惯性力的作用下飞出界外。所所述过渡连接弧面2014为拨种排种装置2与蒜种传输通道3的连接过渡曲面,保证经过柔性拨种轮排出的蒜种顺利滑移至蒜种传输通道3。
[0047]
参见图5,所述柔性拨种轮包括中心连接轴2021和柔性拨种叶片,所述柔性拨种轮主要材料可以选择硅胶或橡胶,保证在拨种排种过程中减少对蒜种的损伤,实现柔性排种。所述柔性拨种叶片的边线由内凹形圆弧2022和外凸形圆弧2023组合而成,整体圆周形成弧形切斜分种曲线,以使得相邻两柔性拨种叶片间形成喇叭口状分种空间2024,充分利用柔性拨种轮投送分种作用,以二次投种方式减小或抵消蒜种落入蒜种传输通道3瞬间的相对速度,调整缓冲下落过程中蒜种轨迹及速度,实现蒜种的平稳投送,将蒜种接引至蒜种传输通道3内稳定滑移。所述电控系统传动轴1通过中心连接轴2021装配在拨种排种装置外壳201上。可以通过配套电控传动系统(包括电源适配器及自编程序控制器)独立驱动柔性拨种轮以固定转动比例实现从单粒取种装置中下落蒜种的同步传动。
[0048]
参见如6和图7,所述蒜种传输通道3为v型传输通道,包括:v型凹槽302,所述过渡连接弧面2014与所述v型凹槽302的第一端相连接,所述v型凹槽302的第二端与所述蒜种特征识别及定向播种机构6的进口相连接。所述v型凹槽302的v型夹角做圆角处理形成弧形圆角305,所述v型凹槽302侧壁上设置不对称圆形凸起303。所述v型凹槽302的设计可由其横截面沿蒜种下落路径扫描成型,经柔性拨种轮排出的蒜种顺利滑移至v型传输通道后,蒜种
可以在v型传输通道内平稳滑移,减少蒜种弹跳、翻滚等现象。
[0049]
由于蒜种的头尾的质量有较为明显的差别、且充分考虑到蒜种质心分布特点,v型凹槽302的v型夹角设计满足45
‑
60
°
最为适宜,同时为避免出现尖锐边角,将v型凹槽302按照设计的v型夹角做相对应的圆角处理,形成上述弧形圆角305。
[0050]
为了让沿v型凹槽302下落的蒜种可以实现蒜种有序(纵向滑移)运动至蒜种特征识别及定向播种机构6,v型传输通道需要设计一定的长度以及在v型凹槽302侧壁上设置不对称圆形凸起303,v型传输通道的长度设计保证蒜种有一定的自身调节的时间,因此确定v型传输通道长度满足5
‑
20cm的设计范围,不对称圆形凸起303保证了蒜种接触后产生一个旋转力矩,蒜种由横向向下传输变为纵向向下传输,保证蒜种纵向有序滑移。
[0051]
所述v型凹槽302的第二端设置有第一连接板301和第二连接板304,为防止蒜种在v型传输通道内出现卡滞现象,v型传输通道与蒜种特征识别及定向播种机构6的安装夹角范围应满足大于v型传输通道与蒜种的摩擦角。所述第一连接板301与安装架的安装支撑连接,用于确定最佳的传输角度,确定安装角度范围为60
‑
80
°
,第二连接板304通过螺栓螺母与安装架固定连接。
[0052]
参见图8
‑
10,所述蒜种特征识别及定向播种机构6包括y型料斗、翻转安装支架6037、张紧弹簧604、翻转驱动舵机605、开合驱动舵机607、连接圆盘606、翻转驱动舵机固定轴608、开合驱动舵机固定轴609和开合挡板610。
[0053]
所述y型料斗包括第一y型料斗601和第二y型料斗602,所述第一y型料斗601和第二y型料斗602采用非对称组合活动安装,非对称组合的结构可有效保证大蒜进入y型料斗后处于直立状态,从而确保了大蒜鳞芽识别的准确率和鳞芽调整的成功率。开合驱动舵机607通过开合驱动舵机固定轴609与翻转安装支架6037固定连接,开合驱动舵机607的驱动轴与开合挡板610固定连接,所述开合挡板610设置在所述第一y型料斗601和第二y型料斗602之间的连接缝隙处,当舵机驱动时带动开合挡板610旋转,从而完成y形料斗的开合。
[0054]
同时开合挡板610尾端固定连接在开合驱动舵机607的输出端,由开合驱动舵机607带动开合挡板610做旋转运动,同时施加给第一y型料斗601,第二y型料向外打开的力,完成料斗的打开。所述张紧弹簧604两端分别连接所述第一y型料斗601和第二y型料斗602,所述张紧弹簧604用于连接第一y型料斗601和第二y型料斗602的支撑连接板,主要用于实现y型料斗自然状态下的拉紧作用以及在开合挡板610作用打开后y型料斗的复位作用。翻转驱动舵机605通过与螺栓螺母与安装架固定连接,翻转舵机驱动轴与连接圆盘606固定连接并由翻转驱动舵机固定轴608与翻转安装支架6037固定连接。当翻转舵机驱动时,以安装架为固定支点,带动y型料斗,翻转安装支架6037以及开合驱动舵机607同步做翻转运动。
[0055]
参见图11
‑
13,第一y型料斗601包括:第一支撑挡板6011和第一料斗舱体,所述第一翻转支撑挡板6014上设置有第一翻转轴6018和第一张紧弹簧连接孔6012,所述第一y型料斗601通过所述第一翻转轴6018与所述翻转安装支架6037转动连接,所述第一张紧弹簧连接孔6012与所述张紧弹簧604的第一端固定连接;所述第一料斗舱体包括一锥形弧面6013,所述锥形弧面6013设置有弧面挡板6019所述锥形弧面6013连接第一圆柱形通道6016,所述第一圆柱形通道6016连接第一锥形通道6017;所述锥形通道一侧设置第一翻转支撑挡板6014,对应所述第一张紧弹簧连接孔6012设置第一弹簧连接通孔6015。
[0056]
参见图14
‑
16,所述第二y型料斗602包括:第二支撑挡板6026和第二料斗舱体,所
述第二翻转支撑挡板6022上设置第二张紧弹簧连接孔6021,所述第二张紧弹簧连接孔6021与所述张紧弹簧604的第二端固定连接;所述第二料斗舱体上设置第二翻转轴6023,所述第二y型料斗602通过所述第二翻转轴6023与所述翻转安装支架6037转动连接;所述第二料斗舱体设置有引导凹槽6024,所述引导凹槽6024的两端设置有滑移面6025,所述引导凹槽6024连接第二圆柱形通道6027,所述第二圆柱形通道6027连接第二锥形通道6028;所述第二料斗舱体一侧设置第二翻转支撑挡板6022,所述第二翻转支撑挡板6022设置第二弹簧连接通孔6029。
[0057]
所述第一翻转轴6018和第二翻转分别安装于翻转安装支架6037一侧的通孔处,通过长螺栓连接,第一y型料斗601,第二y型料依次安装位置水平对接。所述第一张紧弹簧连接孔6012和第二张紧弹簧604连接孔分别开设在第一翻转支撑挡板6014和第二翻转支撑挡板6022上,用于实现张紧弹簧604的安装,保证第一y型料斗601和第二y型料间拉紧及复位作用。张紧弹簧604可以穿过第一弹簧连接通孔6015和第二弹簧连接通孔6029实现连接,所述第一弹簧连接通孔6015和第二弹簧连接通孔6029具有保证在料斗打开及闭合的过程中对弹簧干涉作用减小,提高装置可靠性的作用。
[0058]
所述第一翻转支撑挡板6014和第二翻转支撑挡板6022一方面用于实现料斗整体结构稳定性,另一方面用于实现开合挡板610对第一翻转支撑挡板6014和第二翻转支撑挡板6022施加作用力,从而保证料斗顺利打开。所述引导凹槽6024用于实现蒜种从v型传输通道下落至承第一y型料斗601,v型传输通道能够有效实现蒜种的纵向滑移,纵向滑移的蒜种经引导凹槽6024落入承接斗,同时具有将蒜种从承接斗中引导排出的作用,引导凹槽6024的尺寸设计应该满足凹槽宽度应该大于等于所测蒜种的宽度或厚度的最大值小于蒜种的长度的最大值。
[0059]
所述滑移面6025为一种凹型面,用于实现从v型传输通道滑移后那些未经引导凹槽6024传输的蒜种经凹型面可以有效落入承接斗;第一圆柱形通道6016和第一锥形通道6017组成第一承接斗,第二圆柱形通道6027和第二锥形通道6028组成第二承接斗,第一承接斗和第二承接斗采用非对称组合的方式,即第一承接斗和第二承接斗之间有一定的高度差(第一圆柱形通道6016和第二圆柱形通道6027之间的长度的差值),非对称组合的方式可以实现蒜种的有效喂入并可以保持蒜种直立的姿态,所述第一圆柱形通道6016、第二圆柱形通道6027的长度和直径是保证蒜种顺利落入和限制姿态的重要指标,因此设计第二圆柱形通道6027的长度范围为10
‑
30mm,高度差的设计范围为10
‑
20mm,第一圆柱形通道6016和第二圆柱形通道6027直径的设计范围为20~30mm。
[0060]
锥形通道是保持蒜种直立姿态的重要指标,设计第一锥形通道6017和第二锥形通道6028的锥度角范围为20
‑
45
°
。所述弧面挡板6019主要用于将第一y型料斗601和第二y型料连接的缝隙遮挡,防止图像采集器4采集的照片信息中含有缝隙,造成对蒜种鳞芽和根部特征识别不显著,甚至产生特征识别不成功的结果。
[0061]
由内凹形圆弧2022和外凸形圆弧2023组合而成的柔性拨种轮保证在拨种排种过程中减少对蒜种的损伤,以二次投种方式减小或抵消蒜种落入v型传输通道瞬间的相对速度,调整缓冲下落过程中蒜种轨迹及速度,实现蒜种的平稳投送,将蒜种接引至v型传输通道内稳定滑移。v型传输通道保证了蒜种的平稳滑移,减少了蒜种弹跳、翻滚;可以实现蒜种有序(纵向滑移)运动至蒜种特征识别及定向播种机构6。蒜种在y型料斗内主要为直立姿
态,经图像采集器4对蒜种进行图像信息采集,将图像导入大蒜检测网络模型和鳞芽判断网络模型进行蒜种检测识别以及鳞芽特征信息识别,当判别蒜种鳞芽朝上时,开合驱动舵机607工作带动开合挡板610旋转,开合挡板610施加第一y型料斗601和第二y型料作用力,从而完成料斗的打开,完成蒜种定向播种;当判别蒜种鳞芽朝下时,翻转驱动舵机605工作,以安装架为固定支点,带动y型料斗,翻转安装支架6037以及开合驱动舵机607同步做翻转运动,蒜种种体方向改变完成蒜种定向播种。
[0062]
一个示意性实施例,本申请实施例中的蒜种特征识别及定向播种机构6还可以采用另一种形式,参见图18
‑
19,本实施例中蒜种特征识别及定向播种机构6包括:蒜种导入口901、蒜种导出口902、蒜种图像采集器903、定向翻转舵机904、固定连接板905、驱动方轴906和梯形定向翻转板907。
[0063]
所述梯形定向翻转板907采用梯形设计,保证蒜种从蒜种导入口下落后,蒜种在梯形定向翻转板907的姿态主要为平躺姿态,即蒜种长轴方向与梯形定向翻转板的长轴方向保持一致,梯形定向翻转板907的宽度设计满足不小于蒜种的宽度或厚度的最大值。所述蒜种图像采集器903安装在梯形定向翻转板的轴测方向,主要用于采集蒜种特征信息采集;所述驱动方轴906一侧的方轴安装于梯形定向翻转板907的方形槽中,一侧的圆盘与固定连接板905固定连接;所述定向翻转舵机904与固定连接板905一侧固定连接,并于驱动方轴906连接。
[0064]
当蒜种落入梯形定向翻转板907呈现蒜种平躺的姿态时,蒜种图像采集器903采集信息,当采集到蒜种鳞芽信息特征时,定向翻转舵机904带动驱动方轴906固定连接的梯形定向翻转板907逆时针旋转90
°
,蒜种种体方向改变,蒜种鳞芽向上从蒜种导出口902下落完成播种。当采集到蒜种根部信息特征时,定向翻转舵机904带动驱动方轴906固定连接的梯形定向翻转板907顺时针旋转90
°
,蒜种种体方向改变,蒜种鳞芽向上从蒜种导出口902下落完成播种。
[0065]
由上述实施例可知,采用本实施例提供的基于机器视觉的大蒜定向播种装置可以一次性完成蒜种的二次拨种排种,有序输种,种体方向控制,蒜种鳞芽识别,定向播种等,本发明作为大蒜机械化播种的重要播种器件整体性强,实用性高,加速了大蒜(机械化、智能化)播种进程。
[0066]
与上述实施例提供的一种基于机器视觉的大蒜定向播种相对应,本申请还提供了一种基于机器视觉的大蒜定向播种方法的实施例,所述方法包括:
[0067]
s101,蒜种从单粒取种装置下落时,进入拨种排种装置,通过自编控制器,独立驱动柔性拨种轮以固定比例与排种器同步转动,所排出的蒜种经拨种轮反向分种,调整缓冲下落过程中蒜种轨迹及速度,将蒜种接引至v型传输通道轨道内稳定滑移,依据蒜种重心位置分布特点和v型传输通道的不对称圆形凸起,蒜种会呈现有序纵向滑移状态,直至有序落入蒜种特征识别及定向播种机构.
[0068]
s102,参见图20,硬件系统以边缘计算处理器jetson nano为控制核心,由电源模块、摄像头、pca9685模块、翻转驱动舵机,开合驱动舵机成控制系统硬件;边缘计算处理器jetson nano用于边缘计算,进行图像分类、目标检测、分割和语音处理等领域,并且可并行运行多个神经网络。
[0069]
s103,参见图21,当蒜种落入蒜种特征识别及定向播种机构,控制系统初始化后控
制图像采集器对图像进行采集,然后利用利用大蒜检测网络模型对采集的图像进行推理,判断是背景图像还是大蒜图像。如果是背景图像则进行下一帧图像采集并继续判断;如果是大蒜图像,则将图像输入到鳞芽判断网络模型通过推理判断鳞芽的朝向,大蒜检测网络模型和鳞芽判断网络模型相互配合最终完成蒜种特征识别。
[0070]
大蒜检测模型主要对采集的图像进行实时处理,判断是否有蒜种喂入,是对背景图像和大蒜图像进行二分类问题,由于两种图像特征差异显著,参见图22,采用5层卷积神经网络模型,前四层为四个由卷积层、relu层和池化层构成的卷积块,第5层为全连接层;大蒜鳞芽判断模型通过对大蒜图像进行推理,对大蒜鳞芽朝上或朝下进行而分类;大蒜鳞芽判断模型采用resnet
‑
18网络结构,通过迁移学习对网络参数进行训练。
[0071]
大蒜检测模型训练训练采用的图像为8000张rgb图像,其中4000张背景图像,4000张大蒜图像,图像大小裁剪为112
×
112。训练过程中采用adam优化器对模型进行优化,设置初始学习率为0.001,bachsize为32,训练后模型在测试集的准确率为99.3%。
[0072]
大蒜鳞芽判断模型训练训练采用的图像为4000张rgb图像,其中2000张鳞芽朝上的图像,2000张大蒜鳞芽朝下图像,图像大小裁剪为224
×
224。为加快训练过程提高训练准确率,训练采用基于resnet
‑
18网络迁移学习训,训练后模型在测试集准确率为99.6%。
[0073]
s104,经过图像识别后,根据蒜种特征的判别结果分别控制翻转驱动舵机,开合驱动舵机工作,驱动舵机的转动角度可以在0
‑
180
°
内调节,当判别蒜种鳞芽朝上,开合驱动舵机工作,带动开合挡板实现第一y型料斗和第二y型料打开,蒜种自然下落,种体方向未变,落入蒜种汇集传输料斗,开合驱动舵机复位后,在复位弹簧的张紧作用下,第一y型料斗和第二y型料斗闭合;或者,当判别蒜种鳞芽朝下,翻转驱动舵机工作,带动整体做翻转运动,蒜种种体方向改变,落入蒜种汇集传输料斗,实现鳞芽调整。
[0074]
需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0075]
当然,上述说明也并不仅限于上述举例,本申请未经描述的技术特征可以通过或采用现有技术实现,在此不再赘述;以上实施例及附图仅用于说明本申请的技术方案并非是对本申请的限制,如来替代,本申请仅结合并参照优选的实施方式进行了详细说明,本领域的普通技术人员应当理解,本技术领域的普通技术人员在本申请的实质范围内所做出的变化、改型、添加或替换都不脱离本申请的宗旨,也应属于本申请的权利要求保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1