一种摇臂拉拔式辣椒收获装置
1.本实用新型涉及一种摇臂拉拔式辣椒收获装置,尤其针对于辣椒收获效率低、需要对行采收,适应性不强、较低结椒位置难采收等情况,具有较好的实用性和优越性,属于农业机械收获领域。
背景技术:
2.辣椒是中国蔬菜产业中的第一大产业,近年来种植面积不断扩大,但人工采收成本高,效率低。目前,我国辣椒采收机械主要有梳齿滚筒式和对辊式两种。梳齿滚筒式辣椒收获机主要依靠前端横置的滚筒反向旋转,利用固定在滚筒上的梳齿对辣椒进行拉拔采收,该装置效率高,且不需要对行采收。但由于滚筒尺寸较大,对于较低结椒位置的辣椒不能进行充分采收,若减小滚筒尺寸,则梳齿拉拔行程不足,不能有效完成采收。对辊式辣椒收获机主要依靠相邻两螺旋辊斜置,反向旋转,对接触到的辣椒形成向上的作用力,完成辣椒收获。但该装置需要对行采收,采收效率不高。本实用新型利用摇臂机构完成对辣椒的拉拔采收动作,可以实现较低结椒位置的采收,且不需要对行,采收效率高,适应性强。
技术实现要素:
3.本实用新型的目的是克服现有技术中存在的辣椒收获效率低、需要对行采收、较低结椒位置采收不充分等问题。
4.为实现以上目的,本实用新型的技术解决方案是:一种摇臂拉拔式辣椒收获装置,主要摇臂采收部分和输送带传送部分,该装置作业时安装在拖拉机前端,拖拉机后端安装清杂收集装置。
5.摇臂采收部分主要包括摇臂滑轨机构和梳齿拉拔装置,梳齿固定安装在梳齿固定板上,并与摇臂末端固定安装,摇臂一段与偏心轮盘成铰链连接,摇臂滑轨与摇臂成移动副连接,通过滑轨固定板安装在侧板上。作业时,带轮带动偏心轮盘转动,摇臂滑轨机构作业带动梳齿往复运动,对辣椒进行采收作业,采收下来的辣椒通过输送带传送到后方进行清杂和收集。
6.所述输送带传送部分包括跟随输送带和中央输送带两部分,跟随输送带固定安装在摇臂上,跟随摇臂运动,对梳齿拉拔下来的辣椒及时进行输送。中央输送带安装在跟随输送带下方,通过收集口将跟随输送带输送的辣椒收集到中央输送带,由中央输送带向后方输送,完成采收作业。
7.与现有技术相比,本实用新型的有益效果为:
8.通过摇臂滑轨机构,实现对辣椒较低结椒位置的采收,且不需要对行采收,提高了辣椒采收效率,具有较强的适应性。
附图说明
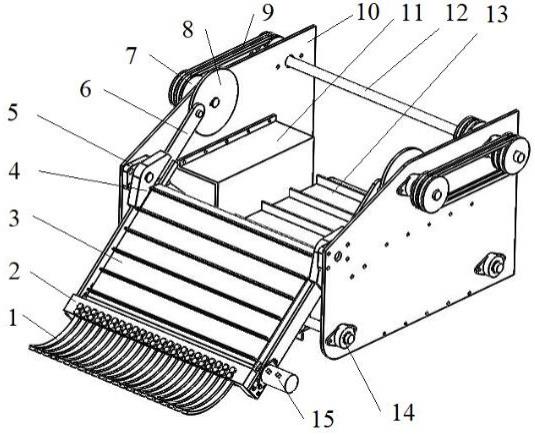
9.图1是本实用新型的轴测图。
10.图2是本实用新型后方轴测图。
11.图3是本实用新型左视图。
12.图4是本实用新型梳齿。
13.图5是本实用新型收集口。
14.图6是本实用新型摇臂滑轨。
15.图中所示:1为梳齿,2为梳齿固定板,3为跟随输送带,4为摇臂滑轨,5为滑轨固定板,6为摇臂,7为带轮,8为偏心轮盘,9为v型带,10为侧板,11为输送带挡板,12为轴,13为中央输送带,14为带座轴承,15为液压马达,16为收集口。
具体实施方式
16.以下结合附图说明和具体实施方式对实用新型作进一步详细的说明。
17.参见图1,图3,一种摇臂拉拔式辣椒收获装置。工作时,装置安装在拖拉机前端,由拖拉机提供动力通过v型带(9)驱动带轮(7)、轴(12)转动,此时与带轮 (7)同轴的偏心轮盘(8)转动,带动摇臂(6)在摇臂滑轨(4)上往复运动。安装在摇臂(6)末端的梳齿固定板(2)和梳齿(6)开始动作对接触到的辣椒进行拉拔采收,采收下来的辣椒掉落到固定安装在摇臂(6)上的跟随输送带(3)上。液压马达(15)作业驱动跟随输送带(3)作业,将采收下来的辣椒通过收集口(16)输送到中央输送带(13),由中央输送带向后方输送,完成一次采收作业。
18.以上所述仅为本实用新型的较佳实例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种摇臂拉拔式辣椒收获装置,包括摇臂采收部分和输送带传送部分,其特征在于:所述摇臂采收部分包括摇臂滑轨(4)通过滑轨固定板(5)固定安装在侧板(10)上,摇臂(6)与摇臂滑轨(4)成移动副连接,偏心轮盘(8)与摇臂(6)成铰链连接,梳齿(1)通过梳齿固定板(2)固定安装在摇臂(6)末端。2.根据权利要求1所述的一种摇臂拉拔式辣椒收获装置,其特征在于:输送带传送部分中,跟随输送带(3)固定安装在摇臂(6)末端,收集口(16)固定安装在侧板(10)上,位于跟随输送带(3)下方,中央输送带(13)固定安装在侧板(10)上,位于收集口(16)下方。
技术总结
一种摇臂拉拔式辣椒收获装置,主要包括摇臂采收部分和输送带传送部分。装置在工作时需要安装在拖拉机前端,拖拉机后端安装清杂收集装置。该装置摇臂部分主要包括摇臂滑轨机构和梳齿拉拔装置,安装在装置最前端,对辣椒进行拉拔采收作业。输送带传送部分包括跟随输送带和中央输送带,安装在拉拔装置下方,将拉拔下来的辣椒输送到后方进行清杂和收集。该装置通过摇臂滑轨机构,实现对辣椒较低结椒位置的采收,且不需要对行采收,提高了辣椒采收效率,具有较强的适应性。有较强的适应性。有较强的适应性。
技术研发人员:杨双平 郭俊先 仇世龙 姜彦武 亚森江
受保护的技术使用者:新疆农业大学
技术研发日:2021.09.24
技术公布日:2022/2/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1