一种去除嵌入砂石的防断裂生姜清理装置的制作方法
[0001]
本发明涉及一种植物领域,尤其涉及一种去除嵌入砂石的防断裂生姜清理装置。
背景技术:
[0002]
生姜为姜科植物姜的新鲜根茎,根茎呈不规则块状,略扁,具指状分枝,质脆,易折断,表面黄褐色或灰棕色,有环节,分枝顶端有茎痕或芽。
[0003]
中国专利cn102657367a针对已有的传统的生姜清洗方法是手工操作高压水枪冲洗,这种方法费时费力,效率极低,清洗不彻底,并且非常浪费水。虽然也有人发明出一些生姜自动清洗设备,主要是将生姜置于输送网带上移动时,使用高压水喷淋清洗;这些生姜自动清洗设备存在一个很大的缺陷是:需要大量的水才能将生姜清洗干净,造成了水资源浪费,特别是在生姜深加工的规模化生产中,生姜清洗成本居高不下的问题,公开了一种节水型生姜清洗装置,其通过沿生姜输送网带输送方向设置至少两个喷淋管组以及对应的集水池,由集水池将对应喷淋管组喷淋清洗后的水收集起来,并将集水池中的水打入后一个喷淋管组中对生姜进行喷淋清洗,最后一个集水池中的水通入沉淀池,经过沉淀后再打入集水池中循环利用;由于前一个集水池中的水泥沙含量较低,将其打入后一个喷淋管组中对泥沙含量较多的生姜进行清洗,完全能够达到清洗的要求,因此仅有最前一个喷淋管组需要补充新水,并且最后一个集水池中的水经过沉淀后循环利用,大大减少了补水量的方式,克服了传统的生姜清洗方法是手工操作高压水枪冲洗,这种方法费时费力,效率极低,清洗不彻底,并且非常浪费水。虽然也有人发明出一些生姜自动清洗设备,主要是将生姜置于输送网带上移动时,使用高压水喷淋清洗;这些生姜自动清洗设备存在一个很大的缺陷是:需要大量的水才能将生姜清洗干净,造成了水资源浪费,特别是在生姜深加工的规模化生产中,生姜清洗成本居高不下的问题,但由于生姜中夹带的泥土主要存在于生姜指状分枝的缝隙中,简单的水淋冲洗难以将指状分枝的缝隙中的泥土彻底去除,并且生姜质脆,易折断,水压过大会导致对生姜的作用力增大,使生姜极易断裂,并且生姜在采收时会有部分尖锐的砂石嵌入在生姜的表面,在生姜运输时尖锐的砂石会将生姜的表皮划破,从而会导致生姜的品相不佳,并且生姜断裂后个头变小导致售卖质量下降。
[0004]
综上,目前需要研发一种将生姜表面的较为松散的大块泥土进行抖落避免后续清理工作量大,同时对生姜指状枝节进行全方位清扫,将粘附的泥土扫落,并且对尖锐砂石进行定位,对生姜表面砂石块嵌入部位进行精准挖出的一种去除嵌入砂石的防断裂生姜清理装置,来克服现有技术中的由于生姜中夹带的泥土主要存在于生姜指状分枝的缝隙中,简单的水淋冲洗难以将指状分枝的缝隙中的泥土彻底去除,并且生姜质脆,易折断,水压过大会导致对生姜的作用力增大,使生姜极易断裂,并且生姜在采收时会有部分尖锐的砂石嵌入在生姜的表面,在生姜运输时尖锐的砂石会将生姜的表皮划破,从而会导致生姜的品相不佳,并且生姜断裂后个头变小导致售卖质量下降的缺点。
技术实现要素:
[0005]
为了克服由于生姜中夹带的泥土主要存在于生姜指状分枝的缝隙中,简单的水淋冲洗难以将指状分枝的缝隙中的泥土彻底去除,并且生姜质脆,易折断,水压过大会导致对生姜的作用力增大,使生姜极易断裂,并且生姜在采收时会有部分尖锐的砂石嵌入在生姜的表面,在生姜运输时尖锐的砂石会将生姜的表皮划破,从而会导致生姜的品相不佳,并且生姜断裂后个头变小导致售卖质量下降的缺点,本发明的技术问题是:提供一种去除嵌入砂石的防断裂生姜清理装置。
[0006]
本发明的技术实施方案是:一种去除嵌入砂石的防断裂生姜清理装置,包括有工作架板、支撑底脚、运行控制屏、入料限位机构、自洁机构、表面清理机构、激光轮廓扫描仪、砂石去除机构和储料舱;工作架板下方四角均设置有支撑底脚一组;工作架板通过支撑座与运行控制屏相连接;工作架板与入料限位机构相连接;工作架板与自洁机构相连接;工作架板与表面清理机构相连接;工作架板与激光轮廓扫描仪进行固接;工作架板与砂石去除机构相连接;工作架板与储料舱相连接;入料限位机构与自洁机构相连接;表面清理机构与砂石去除机构相连接。
[0007]
优选地,入料限位机构包括有第一传动轮、第一转盘、第一连接杆、第二连接杆、转杆、滤板、下料舱、隔板、推板、衔接板、第一伸缩杆、弹簧、固定板、横杆、第一滑轨、第二滑轨、第一滑动支撑座、第二滑动支撑座和限位栏板;第一传动轮轴心与第一转盘进行固接;第一转盘轴心与第一连接杆进行固接;第一转盘通过支撑座与下料舱相连接;第一连接杆与第二连接杆进行传动连接;第二连接杆与转杆进行传动连接;转杆与滤板进行固接;转杆与下料舱进行转动连接;转杆下方与推板进行传动连接;下料舱与隔板进行焊接;推板下方设置有衔接板;衔接板前侧与第一伸缩杆进行固接;第一伸缩杆外表面与弹簧进行套接;衔接板前侧与弹簧进行焊接;第一伸缩杆前侧与固定板进行固接;弹簧前侧与固定板进行焊接;固定板侧面与横杆进行焊接;横杆远离固定板一侧与第一滑轨进行焊接;下料舱下方依次与第一滑轨和第二滑轨进行焊接;第一滑轨与第一滑动支撑座进行滑动连接;第二滑轨与第二滑动支撑座进行滑动连接;第一滑动支撑座和第二滑动支撑座依次与限位栏板进行焊接;第一传动轮与自洁机构相连接;下料舱与工作架板相连接。
[0008]
优选地,自洁机构包括有步进电机、第二传动轮、第三传动轮、传送带、第四传动轮、第五传动轮、第六传动轮、清扫辊、斜板、出料口、喷水器、水箱和开关阀;步进电机输出轴与第二传动轮进行固接;第二传动轮外环面通过皮带与第三传动轮进行传动连接;第三传动轮轴心与传送带进行传动连接;第三传动轮后侧与第四传动轮进行传动连接;第四传动轮后侧与第六传动轮进行传动连接;第四传动轮外环面通过皮带与第五传动轮进行传动连接;传送带后侧依次与第四传动轮和第五传动轮进行传动连接;第六传动轮轴心与清扫辊进行固接;清扫辊下方设置有斜板;斜板侧面下方设置有出料口;清扫辊上方设置有喷水器;喷水器上方与水箱相连接;水箱上方设置有开关阀;步进电机与工作架板相连接;传送带通过支撑座与工作架板相连接;第四传动轮与第一传动轮相连接;清扫辊通过支撑座与工作架板相连接;斜板与工作架板相连接;出料口与工作架板相连接;水箱与工作架板相连接;开关阀与工作架板相连接。
[0009]
优选地,表面清理机构包括有第七传动轮、第一锥齿轮、第二锥齿轮、l型支撑架、第二伸缩杆、第一连接板、第一电动推杆、连接轴杆、第一平齿轮、固定压板、第二平齿轮、第
二连接板、第二电动推杆、第三锥齿轮、第四锥齿轮、第五锥齿轮、第六锥齿轮、连接架和毛刷盘;第七传动轮轴心与第一锥齿轮进行固接;第一锥齿轮与第二锥齿轮进行啮合;第二锥齿轮轴心与第二伸缩杆进行固接;l型支撑架与第二伸缩杆进行转动连接;第二伸缩杆与第一连接板进行转动连接;第一连接板上方与第一电动推杆进行插接;第一连接板下方与连接轴杆进行转动连接;连接轴杆外表面依次与第一平齿轮和固定压板进行固接;第二伸缩杆外表面与第二平齿轮进行传动连接;第二伸缩杆外表面与第三锥齿轮进行固接;第二平齿轮与第二连接板进行转动连接;第二连接板上方与第二电动推杆进行插接;第一连接板下方依次与第二电动推杆和连接架进行固接;第二伸缩杆与连接架进行转动连接;第三锥齿轮与第四锥齿轮进行啮合;第四锥齿轮轴心与第五锥齿轮进行固接;第五锥齿轮与第六锥齿轮进行啮合;第六锥齿轮轴心与毛刷盘进行固接;第七传动轮与砂石去除机构相连接;第一锥齿轮通过支撑座与工作架板相连接;l型支撑架与工作架板相连接;第一电动推杆与工作架板相连接。
[0010]
优选地,砂石去除机构包括有伺服电机、第八传动轮、第九传动轮、第七锥齿轮、第十传动轮、第二转盘、第三连接杆、第四连接杆、滑块、第三滑轨、第五连接杆、第三连接板、第三电动推杆、第六连接杆、第四连接板、微型电机、衔接架、刃管、滑动底架、第三滑动支撑座、第四滑动支撑座、轮齿板、第三平齿轮、第十一传动轮、第十二传动轮、第三伸缩杆、第五连接板、第八锥齿轮和第四电动推杆;伺服电机输出轴与第八传动轮进行固接;第八传动轮外环面通过皮带与第九传动轮进行传动连接;第九传动轮轴心与第七锥齿轮进行固接;第九传动轮外环面通过皮带与第十传动轮进行传动连接;第十传动轮轴心通过伸缩杆与第二转盘进行固接;第二转盘轴心与第三连接杆进行固接;第三连接杆与第四连接杆进行传动连接;第四连接杆与滑块进行传动连接;滑块与第三滑轨进行滑动连接;滑块下方与第五连接杆进行焊接;第五连接杆下方与第三连接板进行焊接;第三连接板下方与第三电动推杆进行固接;第三连接板与第六连接杆进行转动连接;第三电动推杆下方与第四连接板传动连接;第六连接杆与第四连接板进行转动连接;第四连接板通过支撑座与微型电机相连接;微型电机输出轴与衔接架进行固接;衔接架下方与刃管进行固接;第二转盘与滑动底架进行转动连接;第三滑轨后侧与滑动底架进行焊接;滑动底架依次与第三滑动支撑座和第四滑动支撑座进行滑动连接;滑动底架上方与轮齿板进行焊接;轮齿板上方与第三平齿轮进行啮合;第三平齿轮轴心与第十一传动轮进行固接;第十一传动轮外环面通过皮带与第十二传动轮进行传动连接;第十二传动轮轴心与第三伸缩杆进行固接;第三伸缩杆与第五连接板进行转动连接;第三伸缩杆与第八锥齿轮进行固接;第五连接板与第四电动推杆进行插接;伺服电机与工作架板相连接;第七锥齿轮通过支撑座与工作架板相连接;第十传动轮通过支撑座与工作架板相连接;第十传动轮与第七传动轮相连接;第三滑动支撑座与工作架板相连接;第四滑动支撑座与工作架板相连接;第四电动推杆与工作架板相连接。
[0011]
优选地,斜板上表面为斜面,并且低的一端靠近出料口。
[0012]
优选地,衔接架为c字形。
[0013]
优选地,刃管内部下方设置有一字型卡位杆。
[0014]
与现有技术相比,本发明具有以下优点:
[0015]
一、为解决现有技术中的由于生姜中夹带的泥土主要存在于生姜指状分枝的缝隙中,简单的水淋冲洗难以将指状分枝的缝隙中的泥土彻底去除,并且生姜质脆,易折断,水
压过大会导致对生姜的作用力增大,使生姜极易断裂,并且生姜在采收时会有部分尖锐的砂石嵌入在生姜的表面,在生姜运输时尖锐的砂石会将生姜的表皮划破,从而会导致生姜的品相不佳,并且生姜断裂后个头变小导致售卖质量下降的问题;
[0016]
二、设计了入料限位机构,自洁机构,表面清理机构和砂石去除机构,使用时通过首先将所需处理的生姜放置在入料限位机构内,首先通过入料限位机构对放入的生姜进行初步清理,将生姜枝节缝中夹带的较松散的泥沙抖落,之后将生姜送入自洁机构内,通过入料限位机构配合自洁机构对生姜以指定路径运送,并且通过自洁机构对生姜运送路径进行清洗,当生姜运送至指定位置时,通过表面清理机构对生姜枝节缝中粘附的难以抖动分离的泥沙进行清理,然后将生姜运送至激光轮廓扫描仪下方,由于生姜表面会嵌入部分尖锐状的砂石块,通过激光轮廓扫描仪检测到生姜表面凸起较为尖锐的部位,接着当生姜移动至砂石去除机构位置时,则通过砂石去除机构将生姜表面嵌入的砂石块挖出,最后将生姜收集至储料舱内后人工进行简单冲洗即可;
[0017]
三、达到了将生姜表面的较为松散的大块泥土进行抖落避免后续清理工作量大,同时对生姜指状枝节进行全方位清扫,将粘附的泥土扫落,并且对尖锐砂石进行定位,对生姜表面砂石块嵌入部位进行精准挖出的效果。
附图说明
[0018]
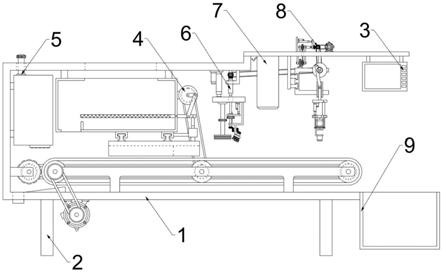
图1为本发明的结构示意图;
[0019]
图2为本发明的入料限位机构结构示意图;
[0020]
图3为本发明的推板,衔接板,第一伸缩杆,弹簧和固定板组合左视图;
[0021]
图4为本发明的自洁机构结构示意图;
[0022]
图5为本发明的表面清理机构结构示意图;
[0023]
图6为本发明的砂石去除机构结构示意图;
[0024]
图7为本发明的限位栏板俯视图;
[0025]
图8为本发明的刃管立体结构示意图。
[0026]
在图中:1、工作架板,2、支撑底脚,3、运行控制屏,4、入料限位机构,5、自洁机构,6、表面清理机构,7、激光轮廓扫描仪,8、砂石去除机构,9、储料舱,401、第一传动轮,402、第一转盘,403、第一连接杆,404、第二连接杆,405、转杆,406、滤板,407、下料舱,408、隔板,409、推板,4010、衔接板,4011、第一伸缩杆,4012、弹簧,4013、固定板,4014、横杆,4015、第一滑轨,4016、第二滑轨,4017、第一滑动支撑座,4018、第二滑动支撑座,4019、限位栏板,501、步进电机,502、第二传动轮,503、第三传动轮,504、传送带,505、第四传动轮,506、第五传动轮,507、第六传动轮,508、清扫辊,509、斜板,5010、出料口,5011、喷水器,5012、水箱,5013、开关阀,601、第七传动轮,602、第一锥齿轮,603、第二锥齿轮,604、l型支撑架,605、第二伸缩杆,606、第一连接板,607、第一电动推杆,608、连接轴杆,609、第一平齿轮,6010、固定压板,6011、第二平齿轮,6012、第二连接板,6013、第二电动推杆,6014、第三锥齿轮,6015、第四锥齿轮,6016、第五锥齿轮,6017、第六锥齿轮,6018、连接架,6019、毛刷盘,801、伺服电机,802、第八传动轮,803、第九传动轮,804、第七锥齿轮,805、第十传动轮,806、第二转盘,807、第三连接杆,808、第四连接杆,809、滑块,8010、第三滑轨,8011、第五连接杆,8012、第三连接板,8013、第三电动推杆,8014、第六连接杆,8015、第四连接板,8016、微型电
机,8017、衔接架,8018、刃管,8019、滑动底架,8020、第三滑动支撑座,8021、第四滑动支撑座,8022、轮齿板,8023、第三平齿轮,8024、第十一传动轮,8025、第十二传动轮,8026、第三伸缩杆,8027、第五连接板,8028、第八锥齿轮,8029、第四电动推杆。
具体实施方式
[0027]
为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
[0028]
实施例1
[0029]
一种去除嵌入砂石的防断裂生姜清理装置,如图1-8所示,包括有工作架板1、支撑底脚2、运行控制屏3、入料限位机构4、自洁机构5、表面清理机构6、激光轮廓扫描仪7、砂石去除机构8和储料舱9;工作架板1下方四角均设置有支撑底脚2一组;工作架板1通过支撑座与运行控制屏3相连接;工作架板1与入料限位机构4相连接;工作架板1与自洁机构5相连接;工作架板1与表面清理机构6相连接;工作架板1与激光轮廓扫描仪7进行固接;工作架板1与砂石去除机构8相连接;工作架板1与储料舱9相连接;入料限位机构4与自洁机构5相连接;表面清理机构6与砂石去除机构8相连接。
[0030]
工作原理:使用该装置时,通过工作架板1和支撑底脚2将该装置水平固定在所需使用的位置,外接电源,操作人员通过运行控制屏3对该装置进行动力控制以及整体调配,首先将所需处理的生姜放置在入料限位机构4内,首先通过入料限位机构4对放入的生姜进行初步清理,将生姜枝节缝中夹带的较松散的泥沙抖落,之后将生姜送入自洁机构5内,通过入料限位机构4配合自洁机构5对生姜以指定路径运送,并且通过自洁机构5对生姜运送路径进行清洗,当生姜运送至指定位置时,通过表面清理机构6对生姜枝节缝中粘附的难以抖动分离的泥沙进行清理,然后将生姜运送至激光轮廓扫描仪7下方,由于生姜表面会嵌入部分尖锐状的砂石块,通过激光轮廓扫描仪7检测到生姜表面凸起较为尖锐的部位,接着当生姜移动至砂石去除机构8位置时,则通过砂石去除机构8将生姜表面嵌入的砂石块挖出,最后将生姜收集至储料舱9内后人工进行简单冲洗即可,该装置达到了将生姜表面的较为松散的大块泥土进行抖落避免后续清理工作量大,同时对生姜指状枝节进行全方位清扫,将粘附的泥土扫落,并且对尖锐砂石进行定位,对生姜表面砂石块嵌入部位进行精准挖出的效果。
[0031]
入料限位机构4包括有第一传动轮401、第一转盘402、第一连接杆403、第二连接杆404、转杆405、滤板406、下料舱407、隔板408、推板409、衔接板4010、第一伸缩杆4011、弹簧4012、固定板4013、横杆4014、第一滑轨4015、第二滑轨4016、第一滑动支撑座4017、第二滑动支撑座4018和限位栏板4019;第一传动轮401轴心与第一转盘402进行固接;第一转盘402轴心与第一连接杆403进行固接;第一转盘402通过支撑座与下料舱407相连接;第一连接杆403与第二连接杆404进行传动连接;第二连接杆404与转杆405进行传动连接;转杆405与滤板406进行固接;转杆405与下料舱407进行转动连接;转杆405下方与推板409进行传动连接;下料舱407与隔板408进行焊接;推板409下方设置有衔接板4010;衔接板4010前侧与第一伸缩杆4011进行固接;第一伸缩杆4011外表面与弹簧4012进行套接;衔接板4010前侧与
弹簧4012进行焊接;第一伸缩杆4011前侧与固定板4013进行固接;弹簧4012前侧与固定板4013进行焊接;固定板4013侧面与横杆4014进行焊接;横杆4014远离固定板4013一侧与第一滑轨4015进行焊接;下料舱407下方依次与第一滑轨4015和第二滑轨4016进行焊接;第一滑轨4015与第一滑动支撑座4017进行滑动连接;第二滑轨4016与第二滑动支撑座4018进行滑动连接;第一滑动支撑座4017和第二滑动支撑座4018依次与限位栏板4019进行焊接;第一传动轮401与自洁机构5相连接;下料舱407与工作架板1相连接。
[0032]
首先人工将生姜通过下料舱407上方的入口倒入至下料舱407内,此时生姜落在滤板406上,此时通过第一传动轮401转动带动第一转盘402进行转动,进而带动第一连接杆403进行转动,进而传动第二连接杆404,使第二连接杆404带动转杆405以转杆405与下料舱407的连接处为固定轴进行晃动,进而通过转杆405带动滤板406进行晃动,使滤板406对放入的生姜进行上下晃动,将生姜枝节缝中夹带的较松散的泥沙抖落,使泥沙通过滤板406的滤孔下落至滤板406的下方,通过隔板408的拦截使泥沙均停留在下料舱407的内部下方,即隔板408靠近滤板406下方的一侧,同时在滤板406的不断晃动作用下,生姜掉落至下料舱407的下方开口处,通过下料舱407的下方开口进入自洁机构5内,同时转杆405晃动时带动推板409上下移动,当推板409向下移动时推动衔接板4010向前侧移动,弹簧4012同步压缩,第一伸缩杆4011配合收缩对弹簧4012起支撑作用,固定板4013和横杆4014起固定作用,当推板409向上移动时,衔接板4010在弹簧4012的弹性回复力作用下向后弹动至原位置,第一伸缩杆4011配合伸缩,此时则通过推板409的上下移动实现衔接板4010的前后晃动,进而通过衔接板4010带动限位栏板4019进行前后晃动,同时限位栏板4019带动第一滑动支撑座4017在第一滑轨4015内滑动,第二滑动支撑座4018在第二滑轨4016内滑动,通过第一滑动支撑座4017和第二滑动支撑座4018对限位栏板4019支撑作用,当生姜移动至限位栏板4019的左侧时,通过限位栏板4019的晃动使生姜进入到限位栏板4019的内部通道中,进而使生姜以指定路径进行运送,该机构实现了对生姜的表面泥沙的初步抖动清除。
[0033]
自洁机构5包括有步进电机501、第二传动轮502、第三传动轮503、传送带504、第四传动轮505、第五传动轮506、第六传动轮507、清扫辊508、斜板509、出料口5010、喷水器5011、水箱5012和开关阀5013;步进电机501输出轴与第二传动轮502进行固接;第二传动轮502外环面通过皮带与第三传动轮503进行传动连接;第三传动轮503轴心与传送带504进行传动连接;第三传动轮503后侧与第四传动轮505进行传动连接;第四传动轮505后侧与第六传动轮507进行传动连接;第四传动轮505外环面通过皮带与第五传动轮506进行传动连接;传送带504后侧依次与第四传动轮505和第五传动轮506进行传动连接;第六传动轮507轴心与清扫辊508进行固接;清扫辊508下方设置有斜板509;斜板509侧面下方设置有出料口5010;清扫辊508上方设置有喷水器5011;喷水器5011上方与水箱5012相连接;水箱5012上方设置有开关阀5013;步进电机501与工作架板1相连接;传送带504通过支撑座与工作架板1相连接;第四传动轮505与第一传动轮401相连接;清扫辊508通过支撑座与工作架板1相连接;斜板509与工作架板1相连接;出料口5010与工作架板1相连接;水箱5012与工作架板1相连接;开关阀5013与工作架板1相连接。
[0034]
当生姜由下料舱407的下方开口掉落至传送带504上时,通过步进电机501带动第二传动轮502进行转动,进而带动第三传动轮503进行转动,进而通过第三传动轮503传动传送带504,同时第三传动轮503传动第四传动轮505和第六传动轮507,第四传动轮505通过皮
带传动第五传动轮506,通过第四传动轮505和第五传动轮506传动传送带504,通过第四传动轮505传动入料限位机构4,通过传送带504对生姜进行运送,进而配合入料限位机构4使生姜在传送带504上以指定路径进行运送,同时通过第六传动轮507转动带动清扫辊508,清扫辊508外表面设置有凸起的清洗块,清扫辊508在转动时外表面的清洗块与传送带504接触摩擦,在水箱5012内准备足量的清水,打开开关阀5013,使水箱5012内的清水通过喷水器5011喷出,配合清扫辊508对传送带504进行清洗,污水通过斜板509由出料口5010排出,该机构实现了对机器的清洁,防止对生姜二次污染。
[0035]
表面清理机构6包括有第七传动轮601、第一锥齿轮602、第二锥齿轮603、l型支撑架604、第二伸缩杆605、第一连接板606、第一电动推杆607、连接轴杆608、第一平齿轮609、固定压板6010、第二平齿轮6011、第二连接板6012、第二电动推杆6013、第三锥齿轮6014、第四锥齿轮6015、第五锥齿轮6016、第六锥齿轮6017、连接架6018和毛刷盘6019;第七传动轮601轴心与第一锥齿轮602进行固接;第一锥齿轮602与第二锥齿轮603进行啮合;第二锥齿轮603轴心与第二伸缩杆605进行固接;l型支撑架604与第二伸缩杆605进行转动连接;第二伸缩杆605与第一连接板606进行转动连接;第一连接板606上方与第一电动推杆607进行插接;第一连接板606下方与连接轴杆608进行转动连接;连接轴杆608外表面依次与第一平齿轮609和固定压板6010进行固接;第二伸缩杆605外表面与第二平齿轮6011进行传动连接;第二伸缩杆605外表面与第三锥齿轮6014进行固接;第二平齿轮6011与第二连接板6012进行转动连接;第二连接板6012上方与第二电动推杆6013进行插接;第一连接板606下方依次与第二电动推杆6013和连接架6018进行固接;第二伸缩杆605与连接架6018进行转动连接;第三锥齿轮6014与第四锥齿轮6015进行啮合;第四锥齿轮6015轴心与第五锥齿轮6016进行固接;第五锥齿轮6016与第六锥齿轮6017进行啮合;第六锥齿轮6017轴心与毛刷盘6019进行固接;第七传动轮601与砂石去除机构8相连接;第一锥齿轮602通过支撑座与工作架板1相连接;l型支撑架604与工作架板1相连接;第一电动推杆607与工作架板1相连接。
[0036]
当生姜运送至固定压板6010下方,启动第一电动推杆607,向下推动第一连接板606,进而使固定压板6010同时向下移动至压住生姜,此时通过第七传动轮601转动带动第一锥齿轮602进行转动并且第一锥齿轮602啮合第二锥齿轮603进行转动,进而带动第二伸缩杆605进行转动,l型支撑架604起固定作用,通过第二伸缩杆605转动带动第三锥齿轮6014进行转动并且第三锥齿轮6014啮合第四锥齿轮6015进行转动,进而通过第四锥齿轮6015转动带动第五锥齿轮6016进行转动并且第五锥齿轮6016啮合第六锥齿轮6017进行转动,进而通过第六锥齿轮6017转动带动毛刷盘6019进行转动,对固定压板6010压住的生姜一侧进行清扫,连接架6018起支撑作用,接着启动第二电动推杆6013,向下推动第二连接板6012,进而使第二平齿轮6011向下移动至与第一平齿轮609啮合,进而通过第二伸缩杆605转动带动第二平齿轮6011进行转动并且第二平齿轮6011啮合第一平齿轮609进行转动,进而带动连接轴杆608进行转动,进而带动固定压板6010进行转动,进而使固定压板6010带动下方压住的生姜进行转动,进而配合毛刷盘6019对生姜进行全方位清扫,使生姜枝节缝隙内粘附的难以抖落的泥沙扫除,该机构实现了将生姜枝节缝隙内粘附的难以抖落的泥沙扫除。
[0037]
砂石去除机构8包括有伺服电机801、第八传动轮802、第九传动轮803、第七锥齿轮804、第十传动轮805、第二转盘806、第三连接杆807、第四连接杆808、滑块809、第三滑轨
8010、第五连接杆8011、第三连接板8012、第三电动推杆8013、第六连接杆8014、第四连接板8015、微型电机8016、衔接架8017、刃管8018、滑动底架8019、第三滑动支撑座8020、第四滑动支撑座8021、轮齿板8022、第三平齿轮8023、第十一传动轮8024、第十二传动轮8025、第三伸缩杆8026、第五连接板8027、第八锥齿轮8028和第四电动推杆8029;伺服电机801输出轴与第八传动轮802进行固接;第八传动轮802外环面通过皮带与第九传动轮803进行传动连接;第九传动轮803轴心与第七锥齿轮804进行固接;第九传动轮803外环面通过皮带与第十传动轮805进行传动连接;第十传动轮805轴心通过伸缩杆与第二转盘806进行固接;第二转盘806轴心与第三连接杆807进行固接;第三连接杆807与第四连接杆808进行传动连接;第四连接杆808与滑块809进行传动连接;滑块809与第三滑轨8010进行滑动连接;滑块809下方与第五连接杆8011进行焊接;第五连接杆8011下方与第三连接板8012进行焊接;第三连接板8012下方与第三电动推杆8013进行固接;第三连接板8012与第六连接杆8014进行转动连接;第三电动推杆8013下方与第四连接板8015传动连接;第六连接杆8014与第四连接板8015进行转动连接;第四连接板8015通过支撑座与微型电机8016相连接;微型电机8016输出轴与衔接架8017进行固接;衔接架8017下方与刃管8018进行固接;第二转盘806与滑动底架8019进行转动连接;第三滑轨8010后侧与滑动底架8019进行焊接;滑动底架8019依次与第三滑动支撑座8020和第四滑动支撑座8021进行滑动连接;滑动底架8019上方与轮齿板8022进行焊接;轮齿板8022上方与第三平齿轮8023进行啮合;第三平齿轮8023轴心与第十一传动轮8024进行固接;第十一传动轮8024外环面通过皮带与第十二传动轮8025进行传动连接;第十二传动轮8025轴心与第三伸缩杆8026进行固接;第三伸缩杆8026与第五连接板8027进行转动连接;第三伸缩杆8026与第八锥齿轮8028进行固接;第五连接板8027与第四电动推杆8029进行插接;伺服电机801与工作架板1相连接;第七锥齿轮804通过支撑座与工作架板1相连接;第十传动轮805通过支撑座与工作架板1相连接;第十传动轮805与第七传动轮601相连接;第三滑动支撑座8020与工作架板1相连接;第四滑动支撑座8021与工作架板1相连接;第四电动推杆8029与工作架板1相连接。
[0038]
当生姜由激光轮廓扫描仪7检测到尖锐砂石的位置后,生姜移动至刃管8018下方,此时通过伺服电机801带动第八传动轮802进行转动,进而带动第九传动轮803进行转动,进而带动第七锥齿轮804进行转动,启动第四电动推杆8029,推动第五连接板8027向远离第四电动推杆8029一侧移动,第三伸缩杆8026同步伸缩,进而使第八锥齿轮8028移动至与第七锥齿轮804啮合,进而通过第七锥齿轮804转动带动第八锥齿轮8028进行转动,进而带动第三伸缩杆8026进行转动,进而带动第十二传动轮8025进行转动,第十二传动轮8025通过皮带传动第十一传动轮8024,进而带动第三平齿轮8023进行转动,通过第三平齿轮8023传动轮齿板8022,进而使轮齿板8022带动滑动底架8019向前侧移动,滑动底架8019同时与第三滑动支撑座8020和第四滑动支撑座8021进行相对滑动,通过第三滑动支撑座8020和第四滑动支撑座8021对滑动底架8019起支撑作用,同时第十传动轮805与第二转盘806之间连接的伸缩杆配合进行伸缩,当伺服电机801反转,则使轮齿板8022带动滑动底架8019向后侧移动,进而通过滑动底架8019前后移动带动刃管8018根据生姜表面嵌入砂石的具体位置进行前后位置调节,同时启动第三电动推杆8013拉动第四连接板8015,第三电动推杆8013向下推动第四连接板8015时,第四连接板8015以第六连接杆8014与第四连接板8015连接处为轴逆时针转动,使第四连接板8015带动微型电机8016,衔接架8017和刃管8018倾斜,当第三电
动推杆8013向上拉动第四连接板8015时,则使第四连接板8015以第六连接杆8014与第四连接板8015连接处为轴顺时针转动,使第四连接板8015带动微型电机8016,衔接架8017和刃管8018倾斜,第六连接杆8014以与第三连接板8012连接处为轴转动配合第四连接板8015的转动,进而使刃管8018进一步对准生姜表面砂石嵌入的位置,此时第九传动轮803通过皮带传动第十传动轮805,进而带动第二转盘806进行转动,进而通过第二转盘806带动第三连接杆807进行转动,进而通过第三连接杆807传动第四连接杆808,进而使第四连接杆808带动滑块809在第三滑轨8010内上下往复滑动,当滑块809在第三滑轨8010内向下滑动时则同步带动第五连接杆8011向下移动,进而使刃管8018插入至生姜嵌入砂石的位置,接着通过微型电机8016带动衔接架8017进行转动,进而带动刃管8018进行转动,进而使砂石进入到刃管8018的内部,通过刃管8018内部带有的卡位杆将砂石卡住,当滑块809在第三滑轨8010内向上滑动时则同步带动第五连接杆8011向上移动,则使刃管8018向上拔出,同时带动砂石向上移动,进而实现将砂石取出,当对下一组生姜嵌入的砂石进行处理时则由下一块砂石将该砂石挤出,通过衔接架8017的开口处掉落出,该机构实现了对生姜表面嵌入砂石的去除。
[0039]
斜板509上表面为斜面,并且低的一端靠近出料口5010。
[0040]
可以使清洗后的污物通过斜板509下滑至出料口5010位置。
[0041]
衔接架8017为c字形。
[0042]
可以使挤出的砂石块自动掉落出来。
[0043]
刃管8018内部下方设置有一字型卡位杆。
[0044]
可以在砂石块进入到刃管8018内后,刃管8018向上拔出时将砂石块卡住带出。
[0045]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1