一种自动剥离百香果壳内白膜的装置
1.本实用新型涉及百香果加工技术领域,更具体地说,它涉及一种自动剥离百香果壳内白膜的装置。
背景技术:
2.百香果壳内的白膜可用于制作果脯、果胶、食品膳食纤维添加剂等。
3.现有取百香果壳内的白膜的方式是通过手工刮取,具体为工人一手拿着百香果壳,另一手用刀具将白膜刮出,劳动强度大,还容易刮伤手。
技术实现要素:
4.本实用新型要解决的技术问题是针对现有技术的上述不足,本实用新型的目的是提供一种可以降低劳动强度的自动剥离百香果壳内白膜的装置。
5.本实用新型的技术方案是:一种自动剥离百香果壳内白膜的装置,包括控制电路、输送带,所述输送带的表面设有定位槽,所述输送带的上方设有与所述定位槽位置对应的刀具、驱动所述刀具上下运动及水平旋转的第一驱动机构,所述输送带的两侧分别设有与所述刀具位置对应的夹果机构、取膜机构,所述取膜机构的一侧设有膜收集箱,所述输送带的输出端设有壳收集箱,所述控制电路电性连接所述输送带、第一驱动机构、夹果机构、取膜机构。
6.作为进一步地改进,还包括装料箱,所述输送带的输入端设有水槽架,所述水槽架内分别设有热水槽、冷水槽,所述水槽架的上方设有驱动所述装料箱依次浸入所述热水槽、冷水槽的第二驱动机构,所述控制电路电性连接所述第二驱动机构。
7.进一步地,所述第一驱动机构包括第一电机、第二电机、升降台、第一丝杆、第一导向杆、安装架,所述第一电机安装在所述升降台,所述第一电机的转轴连接所述刀具,所述第一丝杆、第一导向杆竖直安装在所述安装架内,所述第二电机安装在所述安装架的顶部,所述第二电机的转轴连接所述第一丝杆,所述升降台螺纹连接在所述第一丝杆上,所述第一导向杆滑动穿过所述升降台。
8.进一步地,所述夹果机构包括两个第一夹爪,两个所述第一夹爪的一端均设有第一齿轮,两个第一齿轮相互啮合,其中一个第一齿轮连接有第三电机。
9.进一步地,所述取膜机构包括两个第二夹爪,两个所述第二夹爪的一端均设有竖直夹板,另一端均设有第二齿轮,两个第二齿轮相互啮合,其中一个第二齿轮连接有第四电机,所述第四电机的一侧连接有安装座,所述安装座的底部设有驱动其旋转的第五电机,所述第五电机的底部设有第二升降气缸。
10.进一步地,所述第二驱动机构包括分别位于所述水槽架两侧的丝杆架,两个所述丝杆架上分别对应安装有第二丝杆、第三丝杆,所述第二丝杆连接有第六电机,所述第三丝杆连接有第七电机,所述第二丝杆、第三丝杆之间设有螺纹连接的水平滑台,所述水平滑台底部的两端分别设有第四丝杆、第五丝杆,所述水平滑台的顶部分别设有连接所述第四丝
杆的第八电机、连接所述第五丝杆的第九电机,所述第四丝杆、第五丝杆均设有螺纹连接的边卡板,所述边卡板的内侧设有与所述装料箱的外缘相适配的卡槽,所述水平滑台底部的两端分别设有滑动穿过所述边卡板的第二导向杆。
11.有益效果
12.本实用新型与现有技术相比,具有的优点为:
13.本实用新型通过输送带将百香果壳输送到刀具下方,夹果机构将百香果壳夹紧,刀具一边下降一边旋转将白膜刮出,最后通过取膜机构将白膜夹到膜收集箱,可以有效降低劳动强度,使用安全性好。
附图说明
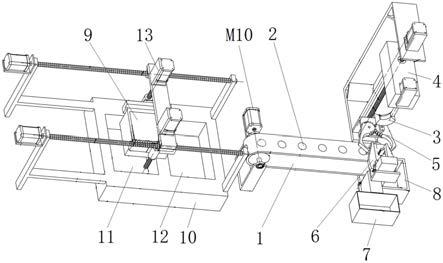
14.图1为本实用新型的结构示意图;
15.图2为本实用新型中第一驱动机构的结构示意图;
16.图3为本实用新型中夹果机构的结构示意图;
17.图4为本实用新型中取膜机构的结构示意图;
18.图5为本实用新型中刀具的结构示意图;
19.图6为本实用新型中第二驱动机构的结构示意图;
20.图7为本实用新型中主控芯片的电路图;
21.图8为本实用新型中排针的电路图;
22.图9为本实用新型中电源稳压模块的电路图;
23.图10为本实用新型中启动模式选择电路、swd接口电路、晶振电路的电路图;
24.图11为本实用新型中复位电路、指示模块和micro-usb模块的电路图;
25.图12为本实用新型中舵机模块的电路图;
26.图13为本实用新型中步进电机控制模块的电路图。
27.其中:1-输送带、2-定位槽、3-刀具、4-第一驱动机构、5-夹果机构、6-取膜机构、7-膜收集箱、8-壳收集箱、9-装料箱、10-水槽架、11-热水槽、12-冷水槽、13-第二驱动机构、14-升降台、15-第一丝杆、16-第一导向杆、17-安装架、18-第一夹爪、19-第一齿轮、20-第二夹爪、21-竖直夹板、22-第二齿轮、23-安装座、24-丝杆架、25-第二丝杆、26-第三丝杆、27-水平滑台、28-第四丝杆、29-第五丝杆、30-边卡板。
具体实施方式
28.下面结合附图中的具体实施例对本实用新型做进一步的说明。
29.参阅图1-13,一种自动剥离百香果壳内白膜的装置,包括控制电路、输送带1,输送带1的表面设有定位槽2,输送带1的上方设有与定位槽2位置对应的刀具3、驱动刀具3上下运动及水平旋转的第一驱动机构4,输送带1的两侧分别设有与刀具3位置对应的夹果机构5、取膜机构6,取膜机构6的一侧设有膜收集箱7,输送带1的输出端设有壳收集箱8,控制电路电性连接输送带1、第一驱动机构4、夹果机构5、取膜机构6。
30.本装置还包括装料箱9,装料箱9的侧壁和底壁设有过水孔,输送带1的输入端设有水槽架10,水槽架10内分别设有热水槽11、冷水槽12,水槽架10的上方设有驱动装料箱9依次浸入热水槽11、冷水槽12的第二驱动机构13,热水槽11内设有加热管、温度传感器,用于
将热水加热到设定温度,控制电路电性连接第二驱动机构13,加热管、温度传感器。
31.第一驱动机构4包括第一电机m1、第二电机m2、升降台14、第一丝杆15、第一导向杆16、安装架17,第一电机m1安装在升降台14,第一电机m1的转轴连接刀具3,第一丝杆15、第一导向杆16竖直安装在安装架17内,第二电机m2安装在安装架17的顶部,第二电机m2的转轴连接第一丝杆15,升降台14螺纹连接在第一丝杆15上,第一导向杆16滑动穿过升降台14。控制电路电性连接第一电机m1、第二电机m2。
32.夹果机构5包括两个第一夹爪18,两个第一夹爪18的一端均设有第一齿轮19,两个第一齿轮19相互啮合,其中一个第一齿轮19连接有第三电机m3。控制电路电性连接第三电机m3。
33.取膜机构6包括两个第二夹爪20,两个第二夹爪20的一端均设有竖直夹板21,另一端均设有第二齿轮22,两个第二齿轮22相互啮合,其中一个第二齿轮22连接有第四电机m4,第四电机m4的一侧连接有安装座23,安装座23的底部设有驱动其旋转的第五电机m5,第五电机m5的底部设有升降气缸。控制电路电性连接第四电机m4、第五电机m5、升降气缸。
34.第二驱动机构13包括分别位于水槽架10两侧的丝杆架24,两个丝杆架24上分别对应安装有第二丝杆25、第三丝杆26,第二丝杆25连接有第六电机m6,第三丝杆26连接有第七电机m7,第二丝杆25、第三丝杆26之间设有螺纹连接的水平滑台27,水平滑台27底部的两端分别设有第四丝杆28、第五丝杆29,水平滑台27的顶部分别设有连接第四丝杆28的第八电机m8、连接第五丝杆29的第九电机m9,第四丝杆28、第五丝杆29均设有螺纹连接的边卡板30,边卡板30的内侧设有与装料箱9的外缘相适配的卡槽,装料箱9的外缘凸出于两侧壁,水平滑台27底部的两端分别设有滑动穿过边卡板30的第二导向杆。控制电路电性连接第六电机m6、第七电机m7、第八电机m8、第九电机m9。
35.输送带1通过第十电机m10驱动运行,输送带1上设有用于检测百香果壳运动到位的感应开关,感应开关可以是对射式光电开关或反射式光电开关或超声波传感器。控制电路电性连接第十电机m10、感应开关。
36.第一电机m1、第二电机m2、第六电机m6、第七电机m7、第八电机m8、第九电机m9、第十电机m10为步进电机,第三电机m3、第四电机m4、第五电机m5为舵机。
37.如图7-13所示,控制电路包括主制模块、步进电机控制模块、电源稳压模块、启动模式选择电路、swd接口电路、晶振电路、复位电路、舵机模块、指示模块和micro-usb模块。电源稳压模块包括220v交流电压输入接线柱1和2、电源开关s1、保险丝f1、变压器t1、整流桥d1,电容c1、c2和电解电容ec1起滤波作用,最终输出12v直流电压。电压转换芯片u2输入12v电源,经转换得到5v电压,电压转换芯片u1输入12v电源,经转换得到3.3v电压,电容c3、c4、c5、c6起滤波作用;指示模块包括串联一起的电阻r8和指示灯led1,其中电阻r8一端接12v电压,指示灯led1另一端接地。
38.主制模块包括主控芯片u7和连接在控制芯片u7一个i/o引脚上的复位电路,该复位电路中的3.3v上电时,c7充电,在10k电阻r7上出现电压,使得u7芯片复位,几个毫秒后,c7充满,10k电阻r7上电流降为0,电压也为0,使得u7芯片进入工作状态,工作期间,按下k1,c7放电,在10k电阻r7上出现电压,使得u7芯片复位,松开k1,c7又充电,几个毫秒后,u7芯片进入工作状态,电阻r6为限流电阻,控制芯片u7为stm32f103c8t6单片机芯片;启动模式选择电路,p3为启动模式选择排针,电阻r3和r4为限流电阻,本电路默认选择boot0=1,boot1
=0,设置为swd下载方式,通过j1与串口连接进行程序下载,可以对控制芯片u7的系统进行快速升级;micro-usb模块,该模块由usb-mrico插座和电阻r2、r5和上拉电阻r1组成,可为u7供电和与pc端进行通讯;步进电机控制模块包括第一电机驱动芯片b1、第二电机驱动芯片b2、第三电机驱动芯片b3、第四电机驱动芯片b4、第五电机驱动芯片b5、第六电机驱动芯片b6、第七电机驱动芯片b7。7个电机的驱动芯片的信号输入对应连接在控制芯片u7的i/o引脚上,第一电机驱动芯片b1的控制输出引脚对应连接在第一电机m1上,第二步进电机驱动芯片b2的控制输出引脚对应连接在第二电机m2上,第三步进电机驱动芯片b3的控制输出引脚对应连接在第六电机m6上,第四步进电机驱动芯片b4的控制输出引脚对应连接在第七电机m7上,第五步进电机驱动芯片b5的控制输出引脚对应连接在第八电机m8上,第六步进电机驱动芯片b6的控制输出引脚对应连接在第九电机m9上,第七步进电机驱动芯片b7的控制输出引脚对应连接在第十电机m10上。舵机模块的三个单轴总线舵机:第三电机m3、第四电机m4、第五电机m5的pwm输入信号引脚对应连接在控制芯片u7的i/o引脚上。晶振电路模块包括两部分,一部分组成外部高速时钟,一部分组成外部低速时钟,其中电容c8、c11和晶振y2组成u7的8mhz的外部高速时钟,提供精准的系统时钟,另一部分由电容c9、c10和晶振y1组成u7的32.768khz的外部低速时钟,提供精准的定时服务io左右引脚由排针p1、p2组成,实现与外部的信号交互和设置。
39.本实用新型至少可以实现以下工作方式:
40.将百香果壳放入装料箱9;第二驱动机构13的边卡板30运动到装料箱9处,并将装料箱9的外缘插入到卡槽内;
41.第二驱动机构13驱动装料箱9浸入热水槽11并浸泡设定时间,设定时间为5-8分钟,热水槽11的水温不低于95℃;
42.第二驱动机构13驱动装料箱9浸入冷水槽12进行冷却;
43.第二驱动机构13驱动装料箱9运动到输送带1的输入端,通过人工将百香果壳放入定位槽2;
44.输送带1将百香果壳输送到刀具3的下方,感应开关检测到百香果壳后,输送带1停止,夹果机构5将百香果壳夹紧;
45.第一驱动机构4驱动刀具3向下运动及水平旋转进行刮白膜;
46.刮白膜结束后,第一驱动机构4驱动刀具3抬起;
47.取膜机构6将白膜夹到膜收集箱7,夹果机构5放行百香果壳,百香果壳掉入到壳收集箱8内。
48.以上仅是本实用新型的优选实施方式,应当指出对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些都不会影响本实用新型实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1