动力支承与传递装置的制作方法
[0001]
本发明涉及动力支承与传递装置,具体涉及用于微创手术操作臂 的动力支承与传递装置。
[0002]
发明背景
[0003]
机械操作设备应用于医疗领域中,例如用于微创手术。与传统手 术相比,微创手术具有创伤小,疤痕少,患者恢复快,住院时间短, 术后并发症发生率低等优点。随着医疗技术的发展,微创治疗技术已 经由多孔微创,发展到单孔微创,再至经人体自然腔道实施手术。这 就要求微创手术操作臂具有以下特点:1)尺寸小,例如操作臂直径小 于8毫米;2)具有一定柔性,以便于通过人体狭窄腔道;3)操作能 力灵巧等。作为微创手术操作臂的动力支承与传递装置,例如操作臂 末端的重要组成部分,腕关节是用于实现类似人手腕动作、进行灵巧 手术操作的结构。动力支承与传递装置,例如腕关节,其结构、尺寸 和灵巧度决定了微创手术操作臂的整体尺寸和灵巧度。
[0004]
目前常用的操作臂腕关节由多个转动关节串联连接,通过柔性杆 或柔性绳索进行驱动,部件多,结构复杂,难以实现小型化(小于5 毫米)。同时,经多次重复操作后,各运动关节或者柔性杆或者柔性 绳索的磨损,会导致操作精度降低,影响手术效果。而频繁更换新的 操作臂则会导致设备成本增加。
[0005]
为了解决上述问题,本发明提供一种动力支承与传递装置,包括 可以在初级操控部件与及次级操控部件之间提供动力支承,并实现次 级操控部件相对于初级操控部件的至少一个运动自由度的装置,例如 在机械臂与机械手之间提供动力支承的腕关节。
技术实现要素:
[0006]
本发明涉及一种动力支承与传递装置,例如一种连接机械手与机 械臂的关节机构。本发明的动力支承与传递装置包括基部、连接部及 执行部。所述连接部具有第一端及第二端。第一端耦接于基部。第二 端耦接于执行部。第二端可相对于所述第一端位移,从而允许所述执 行部相对于所述基部位移。本发明的解决方案提供灵活且简单的机构, 结构紧凑,一体成型,无需装配、润滑、不存在摩擦,使得安装于所 述执行部的机械手可相对于安装于所述基部的机械臂作至少一个自由 度的运动。
[0007]
本发明提供的动力支承与传递装置包括基部,连接部及执行部。 所述连接部具有第一端及与第一端相对设置的第二端。所述连接部的 第一端固定于所述基部,所述执行部联接于所述所述连接部的第二端。 所述第二端可相对于所述第一端位移,从而允许所述执行部相对于所 述基部位移。
[0008]
根据一个实施方案,所述连接部的第一端一体成型于所述基部, 所述连接部的第二端一体成型于所述执行部。
[0009]
优选地,所述连接部位于所述动力支承与传递装置的包络侧表面 中间部,所述基部包括第一固持部,所述执行部包括第二固持部,所 述第一固持部及第二固持部位于所述包络侧表面与所述连接部之间, 其中,所述第二固持部相对于所述第一固持部的位移使得
所述执行部 相对于所述基部以所述连接部为支点转动。
[0010]
优选地,本发明的动力支承与传递装置还可以包括形成于所述第 一固持部的通道及驱动件,所述驱动件可移动地穿设于所述通道且固 定于所述第二固持部,所述驱动件相对于所述基部的位移使得所述执 行部相对于所述基部以所述连接部的主体部为支点转动。
[0011]
优选地,本发明的动力支承与传递装置还可以包括肋部,所述肋 部连接于所述基部与所述执行部之间,所述执行部相对于所述基部的 转动使得所述肋部弹性变形。
[0012]
优选地,所述肋部位于所述连接部与所述通道之间。
[0013]
优选地,所述连接部贯穿设置于所述动力支承与传递装置的包络 侧表面的第一侧端部与第二侧端部之间。
[0014]
根基一个实施方案,所述连接部包括第一连接梁及第二连接梁, 所述第一连接梁设置于所述动力支承与传递装置中心轴的第一侧,所 述第二连接梁设置于所述动力支承与传递装置中心轴与所述第一侧相 对的第二侧。
[0015]
优选地,本发明的动力支承与传递装置还可以包括所述第一连接 梁及第二连接梁分别具有首端及尾端,所述第一连接梁的首端连接于 所述执行部位于所述包络侧表面的第二侧端部,所述第一连接梁的尾 端连接于所述基部位于所述包络侧表面的第一侧端部,所述第二连接 梁的首端连接于所述执行部位于所述包络侧表面的第二侧端部,所述 第二连接梁的尾端连接于所述基部位于所述包络侧表面的第一侧端 部。
[0016]
根据另一实施方案,本发明提供一种动力支承与传递装置,其包 括基件、一对第一连接杆、转接件、一对第二连接杆及执行件,所述 一对第一连接杆的一对第一外端固定于所述基件,所述一对第一连接 杆的一对第一内端连接于所述转接件的第一固接部,穿过所述一对第 一外端定义第一转轴;所述一对第二连接杆的一对第二外端固定于所 述执行件,所述一对第二连接杆的一对第二内端连接于所述转接件的 第二固接部,穿过所述一对第二内端定义第二转轴。其中,所述一对 第二连接杆可相对于所述转接件关于所述第二转轴转动,从而允许所 述执行件相对于所述转接件关于所述第二转轴转动;所述一对第一连 接杆可相对于所述基件关于所述第一转轴转动,从而允许所述执行件 及所述转接件相对于所述基件关于所述第一转轴转动。
[0017]
优选地,所述第一转轴与所述第二转轴正交。
[0018]
优选地,所述第一转轴与所述第二转轴沿所述动力支承与传递装 置的纵向间隔设置。
[0019]
优选地,所述第一固接部位于所述执行件与所述第二固接部之间, 所述第二固接部位于所述基件与所述第一固接部之间。
[0020]
根据又一实施方案,本发明提供一种动力支承与传递装置,其包 括基件、执行件、耦接于所述基件与所述执行件的多个连控件,所述 连控件的主体部可移动地穿设连接于所述基件,所述连控件具有第一 外端及第二外端,所述第二外端耦接于所述执行件,所述第一外端与 第二外端分别位于所述基件的两侧。其中,所述多个连控件中的至少 一个连控件的第二外端可相对所述于基件位移,从而允许所述执行件 相对于所述基件位移。
[0021]
优选地,所述基件形成有一对第一穿孔及一对第二穿孔,所述连 控件包括一对第一连控件及一对第二连控件,所述一对第一连控件分 别可移动地穿设于所述第一穿孔,所
述一对第二连控件分别可移动地 穿设于所述第二穿孔。
[0022]
优选地,所述一对第一穿孔沿与所述动力支承与传递装置的纵向 轴正交的第一方位轴排布,所述一对第二穿孔沿与所述动力支承与传 递装置的纵向轴及所述第一方位轴正交的第二方位轴排布。
[0023]
优选地,所述一对第一穿孔分别位于所述纵向轴的两侧,所述一 对第二穿孔分别位于所述纵向轴的两侧。
[0024]
优选地,本发明的动力支承与传递装置还可以包括多个适配件, 每个适配件具有第一节段及第二节段,所述第一节段及第二节段各自 具有首端及尾端,所述第一节段的首端连接于所述执行件,所述第二 节段的尾端连接于一个所述连控件的第二外端,所述第一节段的尾端 可移动地耦接于所述第二节段的首端。
[0025]
优选地,本发明的动力支承与传递装置还可以包括多个联动件, 每个联动件可转动地连接于一个所述适配件第一节段的尾端与该适配 件第二节段的首端之间。
[0026]
优选地,所述多个联动件中的每一个联动件通过第一联动转轴与 一个所述适配件第一节段的尾端可枢转连接,该联动件通过第二联动 转轴与一个所述一个所述适配件第二节段的首端可枢转连接,所述第 二联动转轴与所述第一联动转轴正交。
[0027]
优选地,所述每个适配件第一节段的尾端可转动地耦接于该适配 件第二节段的首端。
[0028]
优选地,所述每个适配件第二节段的首端形成有球面转动座,该 适配件第一节段的尾端形成有球面转动头,所述球面转动头可转动地 收置于所述球面转动座,使得所述第一节段可以相对于所述第二节段 转动。
[0029]
根据再一实施方案,本发明提供一种操控装置,包括基座,连接 于所述基座的至少一个根据前述实施方案中任一个所描述的动力支承 与传递装置,及连接于所述动力支承与传递装置的操控工具。
[0030]
附图简要说明
[0031]
各幅附图中,相同的标记指代结构相同或功能相似的部件。附图 与下面的详细说明共同包含在说明书中,用以根据本发明描述各实施 例并解释其技术方案、原理及技术效果。
[0032]
图1是根据本发明第一实施例的动力支承与传递装置的立体图。
[0033]
图2是图1所示动力支承与传递装置的主视图。
[0034]
图3是图2所示动力支承与传递装置的部件发生相对位移后的主 视图。
[0035]
图4是图1所示动力支承与传递装置的侧视图。
[0036]
图5是图4所示动力支承与传递装置沿a-a的剖视立体图。
[0037]
图6是图4所示动力支承与传递装置沿b-b的剖视俯视图。
[0038]
图7是根据图1所示动力支承与传递装置的局部剖视立体分解图。
[0039]
图8是根据图1所示动力支承与传递装置的局部剖视立体分解图。
[0040]
图9是根据图1所示动力支承与传递装置的局部剖视立体装配图。
[0041]
图10是根据图1所示动力支承与传递装置的部件发生相对位移后 的局部剖视立体装配图。
[0042]
图11是图1所示的动力支承与传递装置装配操作臂及手术器械的 系统装配立体
图。
[0043]
图12是图11的主视图。
[0044]
图13是图11及图12所示的动力支承与传递装置装配操作臂及手 术器械系统中手术器械相对于操作臂发生位移后的主视图。
[0045]
图14是根据本发明第二实施例的动力支承与传递装置的立体图。
[0046]
图15是图14所示动力支承与传递装置的主视图。
[0047]
图16是图15所示动力支承与传递装置的部件发生相对位移后的 主视图。
[0048]
图17是图14所示动力支承与传递装置的侧视图。
[0049]
图18是图17所示动力支承与传递装置沿c-c的剖视立体图。
[0050]
图19是图17所示动力支承与传递装置沿d-d的剖视俯视图。
[0051]
图20根据图14所示动力支承与传递装置的局部剖视立体图。
[0052]
图21是图14所示的动力支承与传递装置装配操作臂及手术器械 的系统装配主视图。
[0053]
图22是图21所示的动力支承与传递装置装配操作臂及手术器械 系统中手术器械相对于操作臂发生位移后的主视图。
[0054]
图23是根据本发明第三实施例的动力支承与传递装置的立体图。
[0055]
图24是根据图23的本发明动力支承与传递装置的后续视图剖面 方位示意图。
[0056]
图25是图24所示的动力支承与传递装置沿纵向剖面25a、横向剖 面25b及斜向剖面25c的剖视图立体图。
[0057]
图26是图24所示的动力支承与传递装置沿横向剖面26的剖视图 立体图。
[0058]
图27是图24所示的动力支承与传递装置沿横向剖面27的剖视图 立体图。
[0059]
图28是图23所示的动力支承与传递装置的纵向剖视展开立体图。
[0060]
图29是图24所示动力支承与传递装置的透视图。
[0061]
图30是图24及图29所示动力支承与传递装置的部件发生相对位 移后的主视图。
[0062]
图31是图24所示的动力支承与传递装置的分解透视立体图。
[0063]
图32是图24所示的动力支承与传递装置装配操作臂及手术器械 的系统装配主视图。
[0064]
图33是图21所示的动力支承与传递装置装配操作臂及手术器械 系统中手术器械相对于操作臂发生位移后的主视图。
[0065]
图34是根据本发明第四实施例的动力支承与传递装置的立体图。
[0066]
图35是图34所示动力支承与传递装置的分解立体图。
[0067]
图36是图34所示动力支承与传递装置的多个转动状态的立体图。
[0068]
图37是根据图34及图36所示的动力支承与传递装置装配有手术 钳的系统透视图。
[0069]
图38是根据本发明第五实施例的动力支承与传递装置的立体图。
[0070]
图39是图38的分解立体图。
[0071]
图40是根据本发明第六实施例的动力支承与传递装置的立体图。
[0072]
图41是图40的分解立体图。
[0073]
图42是图40所示动力支承与传递装置的局部放大立体图。
[0074]
图43是图42的分解立体图。
[0075]
图44根据本发明第七实施例的动力支承与传递装置的立体图。
[0076]
图45是图44的分解立体图。
[0077]
图46是图44所示动力支承与传递装置的局部放大立体图。
[0078]
图47是图46的分解立体图。
[0079]
图48是图46的剖视立体图。
[0080]
图49是图48的分解立体图。
[0081]
图50是根据本发明的动力支承与传递装置应用于例如机械臂等 系统的操控装置示意图。
[0082]
根据附图所示的本发明实施例的技术方案,本领域技术人员可以 清楚完整地理解并实施本发明。附图所示结构、一个及/或多个部件, 可能未按照实际尺寸及/或实际比例描绘。例如,一些部件的尺寸可能 相对于其他部件被放大,以帮助对技术方案的理解。
[0083]
发明详细说明
[0084]
以下详细说明示例性而非限定性地阐述本发明的技术方案。本发 明提供一种动力支承与传递装置,该动力支承与传递装置用于机械操 作设备中,在两个相互独立运动的部件之间提供动力支承及动作传递, 例如作为连接于机械操作臂与机械手之间的腕关节,将机械手支承于 机械操作臂上,使得机械手在驱动装置的控制下,可以相对于机械操 作臂作独立运动,从而实现机械手的多种操作动作。
[0085]
如图1至图7所示,根据本发明一个实施例的动力支承与传递装 置100,包括基部102、与基部102间隔设置的执行部108,及位于基 部102与执行部108之间的连接部105。连接部105具有第一外端103、 与第一外端103相对设置的第二外端107,及位于第一外端103及第二 外端107之间的主体部1052。连接部105的第一外端103耦接于基部102。连接部105的第二外端107耦接于执行部108。
[0086]
本文所提及的术语“耦接”,其含义包括两个或多个部件之间相对 固定的、直接或间接的连接方式,也包括两个或多个部件之间可相对 位移的,例如通过相对平动、转动或组合移动方式的直接或间接的连 接方式。
[0087]
根据一个优选方案,连接部105的第一外端103固定于基部102。 根据一个优选方案,连接部105的第一外端103一体成型于基部102, 连接部105的第二外端107一体成型于执行部108。
[0088]
基部102与执行部108之间,沿动力支承与传递装置100的纵向, 即图1及图7所示的z轴方向,形成有间隙104,即,执行部108与基 部102沿动力支承与传递装置100的纵向方向间隔设置,连接部105 位于基部102与执行部108之间。沿横向(x轴方向),连接部105 位于动力支承与传递装置100的包络侧表面109的中间部,即间隙104 的中间部位。侧向轴(y轴)穿过连接部105,连接部105将间隙104 沿x方向分为两个部分。间隙104的存在,使得连接部105的横向宽 度105w小于动力支承与传递装置100的总宽度100w,即,连接部105 的横向宽度105w与间隙104两个部分的横向宽度104w之和为动力支 承与传递装置100的总宽度100w。
[0089]
基部102包括第一固持部102a,执行部108包括第二固持部108a。 第一固持部102a及第二固持部108a沿横向位于包络侧表面109与连接 部105之间。第二固持部108a相对于
第一固持部102a的位移,使得执 行部108可以相对于基部102以连接部105为支点转动,如图3所示。
[0090]
如图7、图8、图9、图10所示,基部102的固持部102a形成有 与纵向(z轴方向)平行的、贯穿基部102的驱动通道112、122。驱 动通道112、122与侧向中心轴(y轴)的距离112d、122d大于连接 部105的横向宽度105w的一半。根据一个优选方案,动力支承与传递 装置100进一步包括驱动件114,124。驱动件114、124可移动地穿设 于驱动通道112、122。驱动件114、124的前端穿过驱动通道112、122, 连接于执行部108。基部102介于两侧固持部102a之间的纵向中间部 位以及执行部108位于两侧固持部108a之间的纵向中间部位还可以形 成有操作通道132。
[0091]
连接部105将执行部108与基部102连为一体,提供基部102与 执行部108之间的动力支承,即,执行部108及在使用中安装于执行 部108的操控工具或手术器械由基部102通过动力支承与传递装置100 承载重量及操作。驱动件114、124相对于驱动通道112、122的位移, 带动执行部108相对于基部102,以连接部105为支点转动,从而实现 执行部108相对于基部102的一个自由度的运动。
[0092]
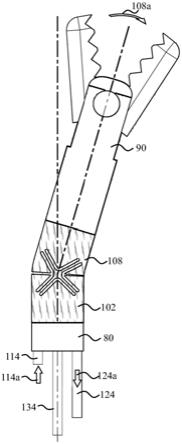
动力支承与传递装置100可以应用于机械操作系统,例如作为将 手术钳90等手术器械连接于机械臂80的连接关节。根据此示例,如 图11、图12及图13所示,机械操作系统的驱动件114、124分别可移 动地穿设连接于驱动通道112、122并固定于执行部108。驱动件114、 124中的一个或两个驱动件沿各自的驱动通道112、122相对于基部102 的位移,带动执行部108相对于基部102位移。例如,第一驱动件114 沿第一驱动通道112朝向执行部108方向114a的移动,及/或第二驱动 件124沿第二驱动通道122向远离执行部108方向124a的移动,将带 动执行部108及安装于其上的手术钳90以连接部105为支点,相对于 基部102沿偏转方向108a转动,使得手术钳90到达预设部位,进行 手术操作,如图11及图12所示。
[0093]
根据第二实施例,如图14至图19所示,本发明的动力支承与传 递装置200,包括基部202、与基部202间隔设置的执行部208,及位 于基部202与执行部208之间的连接部205。连接部205具有第一外端 203、与第一外端203相对设置的第二外端207,及位于第一外端203 及第二外端207之间的主体部2052。连接部205的第一外端203耦接 于基部202。连接部205的第二外端207耦接于执行部208。
[0094]
根据一个优选方案,连接部205的第一外端203固定于基部202。 根据一个优选方案,连接部205的第一外端203一体成型于基部202, 连接部205的第二外端207一体成型于执行部208。
[0095]
基部202与执行部208之间,沿动力支承与传递装置200的纵向, 即如图14所示的z轴方向,形成有间隙204,即,执行部208与基部 202沿动力支承与传递装置200的纵向方向间隔设置,连接部205位于 基部202与执行部208之间。连接部205位于动力支承与传递装置200 沿横向的中间部,即间隙204的中间部位。
[0096]
基部202包括第一固持部202a,执行部208包括第二固持部208a。 第一固持部202a及第二固持部208a沿横向位于包络侧表面209与连接 部205之间。第二固持部208a相对于第一固持部202a的位移,使得执 行部208可以相对于基部202以连接部205为支点转动,如图16所示。
[0097]
在动力支承与传递装置200包括位于包络侧表面209与连接部205 之间、与连接部
205间隔设置且关于纵轴z对称的一对肋部215、225。 每个肋部215、225呈背向纵轴弯曲的弧形穿过间隙204,并且于基部 202及执行部208固定连接。
[0098]
如图19、图20所示,基部202的固持部202a形成有与纵向(z 轴方向)平行的、贯穿基部202的驱动通道212、222。根据一个优选 方案,动力支承与传递装置200进一步包括驱动件214,224。驱动件 214、224可移动地穿设于驱动通道212、222。驱动件214、224的前 端穿过驱动通道212、222并连接于执行部208。基部202介于两侧固 持部202a之间的纵向中间部位以及执行部208位于两侧固持部208a 之间的纵向中间部位还可以形成有操作通道232,用于穿设手术器械所 需的操控部件,例如手术钳操控丝线。
[0099]
连接部205及肋部215、225将执行部208与基部202连为一体, 提供基部202与执行部208之间的动力支承。驱动件214、224相对于 驱动通道212、222的位移,带动执行部208相对于基部202,以连接 部205为支点转动,从而实现执行部208相对于基部202的一个自由 度的运动。
[0100]
根据本实施例,如图16所示,执行部208相对于基部202、以连 接部205为支点的转动,使得肋部215、225弹性变形。具体地,执行 部208朝向右侧肋部225的转动使得左侧肋部215向减小其本身外型 弧度方向弹性变形,同时使得右侧肋部225向增大弧度方向弹性变形。 根据本实施例的动力支承与传递装置200,肋部215、225提供基部202 对执行部208的附加连接与支承。在执行部208的位移过程中,肋部 215、225提供反作用于执行部208位移方向的力,可以使得执行部208 的位移较平稳,并且可以在执行部208恢复至初始位置过程中提供辅 助作用。
[0101]
动力支承与传递装置200可以应用于机械操作系统,例如作为将 手术钳90等手术器械连接于机械臂80的连接关节。根据此示例,如 图20、图21及图22所示,机械操作系统的驱动件214、224分别可移 动地穿设于驱动通道212、222并固定于执行部208。驱动件214、224 中的一个或两个驱动件沿各自的驱动通道212、222相对于基部202的 位移,带动执行部208相对于基部202位移。例如,第一驱动件214 沿第一驱动通道212朝向执行部208方向214a的移动,及/或第二驱动 件224沿第二驱动通道222向远离执行部208方向224a的移动,将带 动执行部208及安装于其上的手术钳90以连接部205为支点,相对于 基部202沿偏转方向208a转动,使得手术钳90到达预设部位,进行 手术操作。
[0102]
根据第三实施例,如图23至图33所示,本发明的动力支承与传 递装置300,包括基部302、与基部302间隔设置的执行部308,及位 于基部302与执行部308之间的连接部305。连接部305贯穿设置于动 力支承与传递装置300的包络侧表面309的第一侧端部3092与第二侧 端部3098之间。
[0103]
具体地,如图25、图26、图27及图28所示,连接部305包括第 一连接梁3052及第二连接梁3058,第一连接梁3052设置于动力支承 与传递装置300中心轴355的第一侧352,第二连接梁3058设置于动 力支承与传递装置300中心轴355与第一侧352相对的第二侧358。
[0104]
第一连接梁3052具有首端3052a及尾端3052b。第二连接梁3058 具有首端3058a及尾端3058b。第一连接梁3052的首端3052a连接于 执行部308位于包络侧表面309的第二侧端部3082,第一连接梁3052 的尾端3052b连接于基部302位于包络侧表面309的第一侧端部3022。 第二连接梁3058的首端3058a连接于执行部308位于包络侧表面309 的第二侧端部3088,第二连接梁3058的尾端3058b连接于基部302位 于包络侧表面309的第一侧端部
3028。
[0105]
基部302与执行部308之间,沿动力支承与传递装置300的纵向, 即如图23所示的z轴方向,形成有间隙304,即,执行部308与基部 302沿动力支承与传递装置300的纵向方向间隔设置,连接部305位于 基部202与执行部308之间。
[0106]
如图29所示,基部302包括第一固持部302a,执行部308包括第 二固持部308a。第一固持部302a及第二固持部308a沿横向位于包络 侧表面309与连接部305之间。第二固持部308a相对于第一固持部302a 的位移,使得执行部308可以相对于基部302以连接部305与间隙304 交叉位置的位置305a为支点转动,如图30所示。
[0107]
如图31所示,基部302的固持部102a形成有与纵向(z轴方向) 平行的、贯穿基部302的驱动通道312、322。根据一个优选方案,动 力支承与传递装置300进一步包括驱动件314,324。驱动件314、324 可移动地穿设于驱动通道312、322。驱动件314、324的前端穿过驱动 通道312、322,连接于执行部308。基部302介于两侧固持部302a之 间的纵向中间部位以及执行部308位于两侧固持部308a之间的纵向中 间部位还可以形成有操作通道332。
[0108]
连接部305的第一连接梁3052及第二连接梁3058将执行部308 与基部302连为一体,提供基部302与执行部308之间的动力支承。 驱动件314、324相对于驱动通道312、322的位移,带动执行部308 相对于基部302,以连接部305与间隙304交叉位置的位置305a为支 点转动,从而实现执行部308相对于基部302的一自由度运动。
[0109]
动力支承与传递装置300可以应用于机械操作系统,例如作为将 手术钳90等手术器械连接于机械臂80的连接关节。根据此示例,如 图32、及图33所示,机械操作系统的驱动件314、324分别可移动地 穿设于驱动通道312、322并固定于执行部308。驱动件314、324中的 一个或两个驱动件沿各自的驱动通道312、322相对于基部302的位移, 带动执行部308相对于基部302位移。例如,第一驱动件314沿第一 驱动通道312朝向执行部308方向314a的移动,及/或第二驱动件324 沿第二驱动通道322向远离执行部308方向324a的移动,将带动执行 部308及安装于其上的手术钳90以连接部305与间隙304交叉位置的 位置305a为支点,相对于基部302沿偏转方向308a转动,使得手术钳 90到达预设部位,进行手术操作。
[0110]
根据第四实施例,如图34及图35所示,本发明的动力支承与传 递装置400,包括基件402、与基件402间隔设置的执行件408,位于 基件402与执行件408之间的转接件405,一对第一连接杆403及一对 第二连接杆407。
[0111]
第一连接杆403的一对第一外端403a固定于基件402,第一连接 杆的一对第一内端403b连接于转接件405的第一固接部405b,穿过一 对第一外端403a定义第一转轴401a。
[0112]
第二连接杆407的一对第二外端407a固定于执行件408,第二连 接杆407的一对第二内端407b连接于转接件405的第二固接部405a, 穿过一对第二内端407b定义第二转轴401b。一对第二连接杆407可相 对于转接件405关于第二转轴401b转动,从而允许执行部408相对于 转接件405关于第二转轴401b转动。一对第一连接杆403可相对于基 部402关于第一转轴401a转动,从而允许执行部408及转接件405相 对于基部402关于第一转轴401a转动。
[0113]
根据一个优选方案,第一转轴401a与第二转轴401b相互呈正交 方位排布。根据一个优选方案,第一转轴401a与第二转轴401b沿动 力支承与传递装置400的纵向间隔设置。根据一个优选方案,第一固 接部405b位于执行件402与第二固接部405a之间,第二固接部
405a 位于基件402与第一固接部405b之间。
[0114]
第一连接杆403及第二连接杆407在外力作用下可弹性变形。具 体地,如图36所示,第二连接杆407可以以第二转轴401b为支点, 相对于转接件405弹性挠曲,从而允许执行件408相对于转接件405 转动,实现例如从初始状态361沿x轴方向的转动,如图36中状态 362所示。独立于第二连接杆407的弹性挠曲,第一连接杆403可以以 第一转轴401a为支点,相对于基件402弹性挠曲,从而允许执行件408 及转接件405相对于基件402转动,实现例如从初始状态361沿y轴 方向的转动,如图36中状态363所示。在第一连接杆403及第二连接 杆407同时发生挠曲的情况下,执行件408可以相对于基件402沿x 方向及y方向组合位移,实现相对于初始状态361的任意姿态r的移 动,即实现2自由度运动,图36中状态364所示。
[0115]
动力支承与传递装置400可以应用于机械操作系统,例如作为将 手术钳90等手术器械连接于机械臂的连接关节。根据此示例,如图37 所示,执行件408及安装于其上的手术钳90相对于基件402沿x方向、 y方向及/或x-y组合方向的转动,使得手术钳90通过2自由度运动, 到达预设部位,进行手术操作。
[0116]
根据第五实施例,如图38及图39所示,本发明的动力支承与传 递装置500,包括基件502、与基件502间隔设置的执行件508,及位 于基件502与执行件508之间的多个连控件,例如4个连控件512、514、 516、518。每个连控件的主体部512c、514c、516c、518c可移动地穿 设连接于所述基件502。每个连控件具有第一外端512a、514a、516a、 518a及第二外端512b、514b、516b、518b。第二外端512b、514b、516b、 518b固定于执行件508。第一外端512a、514a、516a、518a与第二外 端512b、514b、516b、518b分别位于基件502的两侧。多个连控件512、 514、516、518中的至少一个连控件的第二外端512b、514b、516b、 518b可相对于第一外端512a、514a、516a、518a位移,从而允许所述 执行件508相对于基件502位移。
[0117]
基件502形成有一对第一穿孔522,528及一对第二穿孔524,526。 连控件中的一对第一连控件512,518分别可移动地穿设于第一穿孔 522,528。一对第二连控件514,516分别可移动地穿设于第二穿孔524, 526。
[0118]
根据一个优选方案,一对第一穿孔522,528沿与动力支承与传递 装置500的纵向轴z正交的第一方位轴532排布。一对第二穿孔524, 526沿与动力支承与传递装置500的纵向轴及所述第一方位轴532正交 的第二方位轴542排布。第一穿孔522,528分别位于纵向轴的两侧, 一对第二穿孔524,526分别位于纵向轴的两侧。
[0119]
连控件512、514、516、518将执行部508与基部502连为一体, 提供基部502与执行部508之间的动力支承。一个或多个连控件512、 514、516、518相对于基件的独立或组合的位移,带动执行部508相对 于基件502转动、平动或组合移动。
[0120]
在4个连控件512、514、516、518中的一个连控件相对于基件 502位移,其余连控件与基件502相对固定的设置下,执行件508可实 现相对于基件502的一自由度运动。类似地,当一对连控件相对于基 件502位移,另一对连控件与基件502相对固定的设置下,执行件508 可实现相对于基件502的一自由度运动。4个连控件512、514、516、 518各自独立地相对于基件502的位移,可以实现执行件508相对于基 件502的三自由度运动。例如,连控件514和连控件516相对于基件 502固定,连控件512和连控件518沿基件502轴向相对移动,使执行 件508绕垂直于连控件512和连控件518轴线所在平面的轴线作一自 由度转动。连控件512和连控件518相对于基件502固定,连控件514 和连控件516沿基件502轴向相对移动,使
执行件508绕垂直于连控 件514和连控件516轴线形成平面的轴线作一自由度转动。连控件512、 514、516、518同时沿基件502轴向移动,使执行件508沿基件502轴 线作一自由度、二自由度或总共三个自由度的移动。
[0121]
动力支承与传递装置500可以应用于机械操作系统,例如作为将 手术钳等手术器械连接于机械臂的连接关节。执行件508及安装于其 上的手术钳相对于基件502实现四自由度运动,使得手术钳到达预设 部位,进行手术操作。
[0122]
根据第六实施例,如图40至图49所示,本发明的动力支承与传 递装置600,包括基件602、与基件602间隔设置的执行件608,位于 基件602与执行件608之间的多个连控件,例如3个连控件612、614、 616,及多个适配件620、640、660。
[0123]
多个适配件620、640、660具有相同的结构及功能。以适配件620 为例,适配件620包括第一节段628、第二节段622及位于第一节段 628与第二节段622之间的联动件625。第一节段628具有首端628a 及尾端628b。第二节段622具有首端622a及尾端622b。第一节段628 的首端628a连接于执行件608,第二节段628的尾端622b连接于连控 件612的第二外端612a,第一节段628的尾端628b可移动地耦接于第 二节段622的首端622a。
[0124]
具体地,联动件625通过第一联动转轴625b与对应的适配件第一 节段628的尾端628b可枢转连接。联动件625通过第二联动转轴625a 与对应的适配件第二节段622的首端622a可枢转连接。第二联动转轴 625a与第一联动转轴625b正交。
[0125]
连控件612、614、616及多个适配件620、640、660将执行部608 与基部602连为一体,提供基部602与执行部608之间的动力支承。 连控件612、614、616相对于基件602的独立或组合的位移,分别通 过适配件620、640、660带动执行部608相对于基件602转动、平动 或组合移动。
[0126]
在连控件612、614、616中的一个连控件相对于基件602位移, 其余的两个连控件相对于基件602固定的设置下,执行件608可相对 于基件602作一自由度运动。在连控件612、614、616中的两个连控 件相对于基件602独立位移,其余的一个连控件相对于基件602固定 的设置下,执行件608可相对于基件602作二自由度运动。在连控件 612、614、616均相对于基件602作独立位移的设置下,执行件608可 相对于基件602作三自由度运动。
[0127]
动力支承与传递装置600可以应用于机械操作系统,例如作为将 手术钳等手术器械连接于机械臂的连接关节。执行件608及安装于其 上的手术钳相对于基件602实现三自由度运动,使得手术钳到达预设 部位,进行手术操作。
[0128]
根据第七实施例,如图44至图46所示,本发明的动力支承与传 递装置700,包括基件702、与基件702间隔设置的执行件708,位于 基件702与执行件708之间的多个连控件,例如3个连控件712、714、 716,及多个适配件720、740、760。
[0129]
多个适配件720、740、760具有相同的结构及功能。以适配件720 为例,适配件720包括第一节段728及第二节段722。第一节段728具 有首端728a及尾端728b。第二节段722具有首端722a及尾端722b。 第一节段728的首端728a连接于执行件708,第二节段728的尾端722b 连接于连控件712的第二外端712a,第一节段728的尾端728b可移动 地耦接于第二节段722的首端722a。
[0130]
具体地,适配件720第二节段722的首端722a形成有球面转动座 732a,该适配件720第一节段728的尾端728b形成有球面转动头738b。 球面转动头738b可转动地配接于球
面转动座732a,使得第一节段728 可以相对于第二节段722在三围空间转动。
[0131]
连控件712、714、716及多个适配件720、740、760将执行部708 与基部702连为一体,提供基部702与执行部708之间的动力支承。 连控件712、714、716相对于基件702的独立或组合的位移,分别通 过适配件720、740、760带动执行部708相对于基件702转动、平动 或组合移动。
[0132]
在连控件712、714、716中的一个连控件相对于基件702位移, 其余的两个连控件相对于基件702固定的设置下,执行件708可相对 于基件702作一自由度运动。在连控件712、714、716中的两个连控 件相对于基件702独立位移,其余的一个连控件相对于基件702固定 的设置下,执行件708可相对于基件702作二自由度运动。在连控件712、714、716均相对于基件702作独立位移的设置下,执行件708可 相对于基件702作三自由度运动。
[0133]
动力支承与传递装置700可以应用于机械操作系统,例如作为将 手术钳等手术器械连接于机械臂的连接关节。执行件708及安装于其 上的手术钳相对于基件702实现三自由度运动,使得手术钳到达预设 部位,进行手术操作。
[0134]
图50是根据本发明的动力支承与传递装置应用于例如机械臂等 系统的操控装置示意图。该操控装置800包括基座802,以串联方式依 次连接于基座802的一个或多个动力支承与传递装置805a、805b、 805c、
…
、805n等,以及连接于最前端动力支承与传递装置812的操 作工具或手术器械890。其中,操作工具或手术器械890通过一个或多 个动力支承与传递装置805a、805b、805c、
…
、805n等支承于基座802, 并通过一个或多个动力支承与传递装置805a、805b、805c、
…
、805n 等的传动进行一自由度运动、二自由度运动或多自由度运动。操作工 具或手术器械可以是取样针、手术剪刀、手术夹钳、手术电刀等。动 力支承与传递装置的数量可以是一个也可以是多个,动力支承与传递 装置的组成可以是上述的实施例结合附图所描述的一种或多种动力支 承与传递装置的组合。该执行组件可以用作可操纵转向的取样针,柔 性手术操作臂,手术机器人末端执行器等。
[0135]
可以理解的是,本文结合附图提供的实施例仅是本发明的示例性 技术方案,并不旨在以任何方式限制本发明的范围、适用性、操作或 配置。相反,前面的详细描述将为本领域技术人员提供用于实现本发 明的示例性实施例的便利的路线图,还可以理解的是,本领域技术人 员可以对示例性实施例中描述的元件的功能和布置以及操作方法进行 各种修改、变化及/或替代。而这些修改、变化及/或替代应被理解为属 于如所附权利要求书中阐述定义的本发明的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1