装设于无人飞行器的连续水质感测器的杀菌装置
1.本创作与户外养殖池的水质检测技术有关,尤指一种通过无人飞行器于多数养殖池上飞行,可连续检测不同养殖池的水质的连续水质感测器的而自动杀菌装置,借以降低各养殖池之间交叉污染。
背景技术:
2.随着食品健康意识之逐渐被重视,全球对水产食品的需求不断攀升;然而以捕捞方式所能提供的水产食品几乎已达极限,加上海洋及水质源污染问题日益严重,水产养殖对全球水产食品供应的比重相对与日俱增。
3.由于水产养殖产业是一个对于环境敏感度非常高的产业,被限制在养殖池内生长的养殖生物,会因为养殖池的水质条件优劣影响到养殖生物的生理,更直接影响到水产养殖业者的收益。
4.目前业界所采用之水产养殖方式主要分为室内及户外两种,其中户外水产养殖方式因为可得到较多的天然资源,因此可省去部分的养殖成本,但可能因为养殖池设置地点之地形、天候、距离等限制,必须利用大量人力随时携带检测工具在各养殖池之间来回监测,大幅增加水质检测的难度及成本。
5.为了克服人力监测之不便及成本,遂有相关研究报告指出,在每一养殖池内设置水质检测模块,并通过各水质检测模块随时将水质监测结果自动回传至控制中心,将能够有效克服人力监测的缺点。然而经估算,在每一养殖池内设置可传输检测结果之自动化水质监测系统,须要采购大量检测模块,并建置传输系统、监测系统等软硬件设备,其造价非常昂贵,再加上需要专业人士定期维护等开销,所增加的养殖成本往往令传统业者望之却步。
6.通过无人飞行器采集/盛装养殖池的水体携回降落地点进行水质检测的方式,不啻为解决在每一养殖池内建置自动检测装置之成本的方式之一,例如已知技术中国台湾专利第twm510456、twm530682号等。然而,该等无人飞行器虽然可以克服地形、天候、距离等限制,但若要检测不同养殖池的水质时,该无人飞行器必须频繁往返于不同养殖池与降落地点之间,相对耗费较多的飞行时间及成本,且增加无人飞行器可能在往返过程折损的风险。
7.此外,上述已知技术的无人飞行器采集到某一养殖池的水体后,必须将采集容器经过消毒杀菌程序才能进行下一养殖池的水体采集,以避免各养殖池交叉感染细菌;如此一来,整体水体采集检测作业仍然必须配合大量人力才能完成,缺乏效率。
8.再者,近年来水质监测之技术已有长足进步,各类水质传感元件也已能精确地在短时间内侦测水质,若由无人飞行器带着水质传感元件飞行至养殖池上方,并将水质传感元件潜入水体的方式完成该养殖池的水质检测,将可以克服上述已知技术采集/盛装水体在时间、装备及人力上的缺点。
9.上述利用水质传感元件的构想经本发明人实际规划时,发现在水质传感元件离开该养殖池的水体后,该水质传感元件可能因为附着该养殖池的微生物、细菌或病毒,而影响
后续养殖池的水质检测结果,甚至造成不同养殖池之间的水体交叉污染,以至于无法在不同养殖池之间连续进行水质检测,故实务上仍犹待进一步克服。
技术实现要素:
10.有鉴于上述种种问题,特别是为改善上述习知使用无人飞行器进行水质检测时,可能因为水质传感元件附着该养殖池的微生物、细菌或病毒而带来的风险,本创作之主要目的是在每完成一个养殖池的水质检测时,配合由杀菌灯对水质传感元件照射而自动杀菌,使该无人飞行器及水质传感元件行进到另一养殖池进行水质检测时,该水质传感元件经杀菌处理而得以有效避免在不同养殖池之间连续检测时造成各养殖池的水体交叉污染。
11.为达成上述目的,本创作提供一种装设于无人飞行器的连续水质感测器的杀菌装置,该无人飞行器能够通过旋翼模块于多数养殖池上飞行;
12.该连续水质感测器的杀菌装置包括一与该无人飞行器组装结合的机架、一移动设置在该该机架而能够潜入养殖池的水体测得水质后复位的水质传感元件、一个或多个设置在该机架对该复位的水质传感元件照射杀菌的杀菌灯、一设于该机架带动该水质传感元件移动潜入养殖池的水体或复位的驱动组件,以及一设于该机架控制该驱动组件及所述杀菌灯运作的控制模块,使该水质传感元件在不同养殖池之间连续检测时能够避免各养殖池的水体交叉污染。
13.通过上述构造,当无人飞行器移动到其中一养殖池上方时,由该驱动组件移动该水质传感元件潜入养殖池的水体测得该养殖池的水质状况后,令该水质传感元件复位接受杀菌灯照射杀菌,使该无人飞行器及该水质传感元件行进到另一养殖池进行水质检测时,该水质传感元件经杀菌处理而得以有效避免在不同养殖池之间连续检测时造成各养殖池的水体交叉污染。
14.以下进一步说明各元件之实施方式:
15.实施时,该机架呈筒状,下方设有一可供该水质传感元件进出的开口,由该驱动组件带动该水质传感元件通过该机架的开口,所述多个杀菌灯呈围绕该水质传感元件的型态设于该开口内侧。
16.实施时,该机架呈筒状,下方设有一可供该水质传感元件进出的开口,由该驱动组件带动该水质传感元件通过该机架的开口,所述多个杀菌灯呈围绕该水质传感元件的型态设于该开口内侧,该开口内侧且设有反光材。
17.实施时,该水质传感元件潜入养殖池的水体检测包括但不限于能感测水体的温度、酸碱值、溶氧量、亚硝酸、氨(ammonia,即阿摩尼亚)、氧化还原电位(redox potential),或其它有毒物质中的任一种或多种。
18.实施时,该水质传感元件进一步设置有一存储器,由该存储器储存该水质传感元件所测得的检测数值。
19.实施时,该水质传感元件进一步设置有一无线传输模块,由该无线传输模块将该水质传感元件所测得的检测数值上传至对应的无线接收器。
20.实施时,所述多个杀菌灯是uvc深紫外光二极管。
21.实施时,该驱动组件包括一设于该机架且与该控制模块电性连接的动力元件、一接受该动力元件带动位移的伸缩组件,该水质传感元件设置在该伸缩组件的末端。
22.实施时,该连续水质感测器的杀菌装置进一步在该机架上设有一液体喷洒组件,该液体喷洒组件包括一盛装液体的液体容器、一与该液体容器连接受该控制模块操控运作的加压泵、一与该加压泵连接的液体喷嘴,并且该液体喷嘴延伸至该水质传感元件移动行程周边处。
23.实施时,该连续水质感测器的杀菌装置进一步在该机架上设有一喷气除污组件,该喷气除污组件包括一盛装有压缩气体的气瓶或加压泵、一与该气瓶或加压泵连接受该控制模块操控运作的电磁阀、一与该电磁阀连接的空气喷嘴,并且该空气喷嘴延伸至该水质传感元件移动行程周边处。
24.相较于已知技术,本创作可安装于无人飞行器的底部,在操作人员之控制下迅速移动至欲检测水质的养殖池上方,通过传感元件潜入水体的方式完成该养殖池的水质检测,克服养殖池设置地点之地形、天候、距离等限制,在测得该养殖池的水质状况后,由杀菌灯对该水质传感元件照射而自动杀菌,使该水质传感元件经杀菌处理后进行下一养殖池水质感测,可有效避免造成各养殖池的水体交叉污染,尤适合应用在不同养殖池之间连续进行水质检测,进而降低飞行时间、成本,以及无人飞行器可能在往返过程折损的风险。
25.以下依据本创作之技术手段,列举出适于本创作之实施方式,并配合图式说明如后:
附图说明
26.图1:本创作在不同养殖池之间连续进行水质检测时之无人飞行器行进路径示意图。
27.图2:本创作安装于无人飞行器的外观结构图。
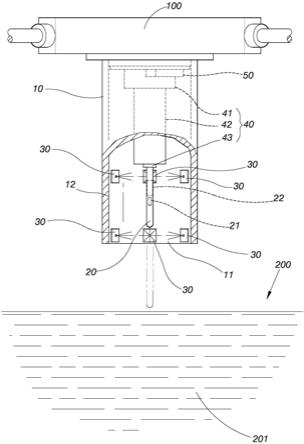
28.图3:本创作之局部结构剖视图。
29.图4:本创作当中之传感元件潜入水体检测水质之状态示意图。
30.图5:本创作当中之传感元件接受杀菌灯照射杀菌状态示意图。
31.图6:本创作当中的液体喷洒组件及喷气除污组件结构示意图。
32.附图标记列表:100
‑
无人飞行器;101
‑
旋翼模块;200
‑
养殖池;201
‑
水体;10
‑
机架;11
‑
开口;12
‑
反光材;20
‑
水质传感元件;21
‑
存储器;22
‑
无线传输模块;30
‑
杀菌灯;40
‑
驱动组件;41
‑
动力元件;42
‑
伸缩组件;43
‑
导螺套及导螺杆;50
‑
控制模块;60
‑
液体喷洒组件;61
‑
液体容器;62
‑
加压泵;63
‑
液体喷嘴;70
‑
喷气除污组件;71
‑
气瓶或加压泵;72
‑
电磁阀;73
‑
空气喷嘴。
具体实施方式
33.如图1至图3所示,本创作为一种装设于无人飞行器100之连续水质感测器的杀菌装置,该无人飞行器100可通过旋翼模块101于多数养殖池200上飞行,克服养殖池200设置地点之地形、天候、距离等限制,迅速于各养殖池200之间移动。
34.该连续水质感测器的杀菌装置包括一与该无人飞行器组装100结合的机架10、一设于该机架10的水质传感元件20、一个或多个设于该机架10的杀菌灯30、一设于该机架10带动该水质传感元件20移动的该驱动组件40,以及一设于该机架10控制该驱动组件40及所述杀菌灯30运作的控制模块50。
35.所述一个或多个杀菌灯30以uvc深紫外光二极管的结构型态呈现,利用uvc深紫外光二极管产生uvc波长在280nm以下的短波灭菌紫外线对该水质传感元件20照射杀菌,尤其uvc深紫外光二极管具有能量高、光输出稳定以及体积小等特性,尤适合安装于无人飞行器100做长时间的滞空飞行。
36.图示中,该机架10概呈筒状,下方设有一可供该水质传感元件20进出的开口11,由该驱动组件40带动该水质传感元件20通过该机架10的开口11,所述多个杀菌灯30则呈围绕该水质传感元件20的型态设于该开口11内侧周围,使该水质传感元件20得以全面接受照射杀菌,且可进一步在该开口11内侧设有反光材12,由该反光材12将所述多个杀菌灯30之光源朝向不同的角度反射,借以提升该对水质传感元件20照射杀菌效果。
37.该水质传感元件20可潜入养殖池201的水体201检测包括但不限于能感测水体的温度、酸碱值、溶氧量、亚硝酸、氨(ammonia,即阿摩尼亚)、氧化还原电位(redox potential),或其它有毒物质中的任一种或多种,该水质传感元件20且可设置有一存储器21,由该存储器21储存该水质传感元件20所测得的检测数值。
38.该驱动组件40包括一设于该机架10且与该控制模块50电性连接的动力元件41、一接受该动力元件41带动位移的伸缩组件42,该水质传感元件20设置在该伸缩组件42末端,借此可伸缩地潜入水体中检测水质或远离水面接受杀菌。
39.在一可行的实施方式中,该动力元件41为一电动机,该伸缩组件42为一导螺套及导螺杆43的组合,当电动机型态的动力元件41旋转时,通过该导螺套及导螺杆43型态的伸缩组件带动该水质传感元件20直线移动进入该机架10的开口11内侧或直线移动伸出该该机架10的开口11外侧。
40.当然,上述动力元件41及伸缩组件42实施时亦可以利用诸如气、液压原理、多连杆、或能够卷绕/释放的绳索、炼条等方式设计,只需通过该动力元件41及伸缩组件42让该水质传感元件20可伸缩或垂降位移地潜入水体中检测水质或远离水面接受杀菌即可。
41.通过上述构造,本创作可通过机架10安装于该无人飞行器100底部,在操作人员之控制下令该无人飞行器100连同该水质传感元件20连续在欲检测水质的不同养殖池200之间移动,克服养殖池200设置地点之地形、天候、距离等限制。
42.当该无人飞行器100连同该水质传感元件20移动至欲检测水质的养殖池200上方时,如图4所示,由该驱动组件40移动该水质传感元件20伸出该机架10的开口11外侧,再配合由该无人飞行器100下降或由该驱动组件40持续移动该水质传感元件20潜入养殖池200的水体201进行水质检测。
43.待该水质传感元件20取得所需检测数值后,如图5所示,同样可配合由该无人飞行器100上升或由该驱动组件40移动该水质传感元件20离开养殖池200的水体201,并且由该驱动组件40持续移动该水质传感元件20进入该机架10的开口11内侧接受所述多个杀菌灯30照射杀菌。
44.如此一来,可使该无人飞行器100及该水质传感元件20行进到另一养殖池进行水质检测时先进行自动杀菌消毒,使该水质传感元件20能够维持在接近无菌状态,避免造成各养殖池的水体交叉污染,尤适合应用在不同养殖池之间连续进行水质检测,所使用的无人飞行器不必频繁往返于养殖池与降落地点之间,进而降低飞行时间和人力成本,有效提高检测效率,并减少无人飞行器可能在往返过程折损的风险。
45.此外,当待该无人飞行器20连同该水质传感元件20回到降落地点后,操作人可自该水质传感元件20的存储器21采集检测数值,以便进一步进行各养殖池的水质监控或管理;以及
46.实施时,该水质传感元件20亦可进一步设置有一无线传输模块22,由该无线传输模块22将该水质传感元件所测得的检测数值上传至对应的无线接收器;实施时,该无线传输模块22可以为wifi或gsm、lte等移动通讯系统,该对应的无线接收器则可以为网络服务器、远程管理主机或智能手机、平板电脑等。
47.在该水质传感元件20取得所需检测数值后,操作人员得以通过其手边的无线接收器及时获得水质检测数值,以便针对养殖池的水质状态启动相关的水处理设备。
48.如图6所示,本创作实施时可进一步在该机架上设有一液体喷洒组件60,该液体喷洒组件60包括一盛装液体的液体容器61、一与该液体容器61连接受该控制模块50操控运作的加压泵(pump,帮浦)62、一与该加压泵62连接的液体喷嘴63,该液体喷嘴63延伸至该水质传感元件20移动行程周边处。
49.液体喷洒组件运60作时,在该液体容器61内装填清水、酒精、杀菌剂或清洁剂等液体,待该水质传感元件20取得所需检测数值且离开养殖池的水体时,由该加压泵62将该液体容器61所盛装的液体通过该液体喷嘴63朝该水质传感元件20喷洒,利用液体的冲击力及溶解作用去除附着在该水质传感元件20上的异物,维持该水质传感元件20之准确率,避免造成各养殖池的水体交叉污染。
50.除此之外,部分水质传感元件20具有须要保持湿润的电极膜,实施时,也可利用上述液体喷洒组件60喷洒清水,一方面达成清洗之目的,另一方面可兼具维持该水质传感元件20的电极膜湿润之功效。
51.在图6中,本创作实施时亦可进一步在该机架上设有一喷气除污组件70,该喷气除污组件70包括一盛装有压缩气体的气瓶或加压泵71、一与该气瓶或加压泵71连接受该控制模块50操控运作的电磁阀72、一与该电磁阀72连接的空气喷嘴73,该空气喷嘴73同样延伸至该水质传感元件20移动行程周边处。
52.该喷气除污组件70运作时,通过该电磁阀72之启闭控制该气瓶或加压泵71之压缩气体释出与否,待该水质传感元件20取得所需检测数值且离开养殖池的水体时,可配合开启该电磁阀72让该气瓶加压泵71之压缩气体通过该空气喷嘴73朝该水质传感元件20喷射去除附着在该水质传感元件20上的异物,同样达到维持该水质传感元件20之准确率,避免造成各养殖池的水体交叉污染之目的。
53.综上所述,本创作可安装于无人飞行器的底部,通过传感元件潜入水体的方式完成该养殖池的水质检测,克服养殖池设置地点之地形、天候、距离等限制,以及在测得该养殖池的水质状况后,由杀菌灯对该水质传感元件照射自动杀菌,使该水质传感元件经杀菌处理而得以有效避免造成各养殖池的水体交叉污染,尤适合应用在不同养殖池之间连续进行水质检测,进而降低飞行时间、成本,以及无人飞行器可能在往返过程折损的风险。
54.以上实施例说明及图式,仅举例说明本创作之较佳实施例,并非以此局限本创作之范围;举凡与本创作之目的、构造、装置、特征等近似或相雷同者,均应属本创作之专利范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1