带语音控制及生命体征监测的智能护理床电控系统的制作方法
1.本发明涉及带语音控制及生命体征监测的智能护理床电控系统。
背景技术:
2.目前,随着科学技术的高速发展和人们生活水平的不断提高,人们越来越注重生活环境的舒适、安全与便利,智能家居系统很好地顺应了人们的这种需求,家居智能化是经济社会发展的必然趋势。近年来,我国也逐渐进入老龄化社会,智能床需求在养老服务业日益扩大,智能电动床不仅可以为老人提供智能化的家居服务,还可以快捷地监测并记录老人的健康数据,有利于老人的智能健康管理。智能电动床采用高科技硬件技术与低能耗有效结合的研发与设计理念,具有调节床板曲线,生命体征监测、震动按摩、、床底灯、智能音箱控制、移动终端app控制等功能,节能环保、性能优越,具有很高的安全性和舒适性。
3.我国智能电动床行业起步较晚,发展潜力巨大,而人口老龄化也为养老服务业的发展带来巨大机遇。所以设计一款功能实用、安全稳定、体验优质的电动床系统,对国内家居及养老行业具有极大的意义。
技术实现要素:
4.本发明所要解决的技术问题总的来说是提供一种带语音控制及生命体征监测的智能护理床电控系统。
5.为解决上述问题,本发明所采取的技术方案是:
6.一种带语音控制及生命体征监测的智能护理床电控系统,其用于护理床,其包括若干马达、执行电路、搭载有控制模块的控制盒、显示屏及遥控器;
7.遥控器通过控制模块控制执行电路驱动马达动作;显示屏与控制模块电连接;
8.控制模块,采用stm32单片机为核心mcu,通过继电器和mos管对马达的伸缩、速度、位置的进行控制盒检测;核心mcu连接定时器及存储器;
9.遥控器,采用stc单片机为核心mcu,实现按键功能检测及屏幕的数据显示等;遥控器通过控制模块控制马达工作;
10.马达,内置有霍尔传感器;
11.执行电路,采用一个mos管控制两个继电器,当启动时,先打开继电器再开mos管,当停止时,先关闭mos管,再关闭继电器。
12.作为上述技术方案的进一步改进:
13.控制模块电连接有生命体征监测带;其包括
14.压电薄膜传感器,压电薄膜传感器通过感知使用者的振动,将振动信息变换成电信号,并传输到控制模块;控制模块,将电信号进行滤波、分析、运算,从中计算出生命体征的信息与数据,数据经由输出接口发送给外部设备;
15.尿湿检测垫,当检测到有排泄物时,控制模块控制便盆自动打开并报警提示。
16.采集呼吸声音的大小及频率,并传送到控制模块,控制模块将采集的呼吸信息数
据与预存的鼾声数据进行拟合,当采集数据与预存鼾声的匹配度达到90%时,控制模块自动调节背部电机驱动床身摆动到止鼾角度。
17.用于检测人体的心率和呼吸率;当人体的心率和呼吸率的检测参数超过阈值,则认定心率或者呼吸率异常;则立刻通过gprs模块向家人打电话报警。
18.用于检测用户离床时间超过设定阈值,判断用户的异常离床;
19.gprs模块,当用户被认为为异常,控制模块通过gprs模块向家人打电话报警。
20.马达采用线性推杆,分别用于护理床的背部摆动、护理床的腿部升降、及护理床的侧翻身动作;护理床的腿部使用两台独立的三节立柱;
21.背部摆动或者腿部升降时,翻身复位到床平位置;马达带有限位开关及霍尔信号,当背部摆动或者腿部升降时,控制模块先控制翻身马达到达床平位置,然后再运行背部摆动或者腿部升降;
22.控制盒内置电压开关电源,电压开关电源有急停开关,可实现紧急断电的功能,以给控制盒各模块供电。
23.显示器,采用彩屏,显示器采用ra8875作为液晶控制器,显示器,外置flash芯片,用于将显示的ui内容存储。
24.控制盒内部有备用蓄电池。
25.控制模块电连接有基于麦克的语音模组,麦克采集的电信号传送给mcu的adc,语音模组通过dac通道输出到功放芯tda2030a驱动有喇叭,以播放声音与外界进行交互;
26.mcu控制模块ic8通过2.4g射频转485模块连接与语音核心mcuu1电连接。
27.语音控制器电路包括语音核心mcuu1、5v-3v3供电模块、无线发射模块、rgb灯电路、无线充电模块接口、触摸按键模块及语音模块;语音模块电连接语音核心mcuu1;
28.5v-3v3供电模块给语音模块供电,语音模块通过无线发射模块收发信号,语音模块供电电连接有rgb灯电路及触摸按键模块;
29.语音核心mcuu1,其脚1接地,脚2接通道gio1,脚3接通道sdio,脚4接通道sck,脚5接通道scs,脚6、7分别通过电阻r8、r9接通道rxd及txd;脚8、9接led sig通道;脚10通过电阻r7接地,脚11、12分别通过电阻r4、r5接3.3v电源;脚12-16依次接scl、key、dscl、dsda及3.3v;脚1、16之间设置有隔离电容c9;
30.5v-3v3供电模块,直流5v电压通过电容c6接地,通过二极管d2、分别输出4.3v及稳压器ic3的输入端,稳压器ic3的输出3v3直流电压,并通过并联的隔离电容接地;
31.无线发射模块,其射频芯片j3,其脚2-5分别通过gio1、sdio、sck、scs通道接语音核心mcuu1;脚1接3v3电源,脚6接地,脚1、6通过电容c4隔离;
32.rgb灯电路,包括led驱动电路模块ic4、夜灯模块及rgb电路;
33.语音核心mcuu1通过led驱动电路模块ic4与rgb电路电连接;
34.rgb电路,直流5v通过若干rgb三色发光二极管与对应电阻接led驱动电路模块ic4的对应接口;
35.夜灯模块,直流5v通过对应的夜灯并联限流电阻后接对应的夜光灯二极管hl,接三极管q1的集电极,三极管q1的基极通过通道night light接led驱动电路模块ic4,发射极接地;led驱动电路模块ic4触发三极管q1,使得夜光灯二极管hl发光,进行夜间照明;
36.触摸按键模块,触摸按键芯片ic2,通过key接语音核心mcuu1,通过脚3接电容c2接
地,脚3通过限流电阻r1接touch key,接插头j2;脚5接电源;
37.语音模块包括语音芯片ic1,语音芯片ic1通过脚17、18通过skp接喇叭,脚15、16接语音mic;脚4、5接语音核心mcuu1的mcu rxd及mcu txd的串口通道。
38.控制模块,包括mcu控制模块;mcu控制模块ic8怎么与语音核心mcuu1电连接?
39.在mcu控制模块ic8中,脚1接入5v电压;脚2接d/r通道,脚4、5接地,脚6通过电容c80接地,脚7、8一路接5v一路通过电容c83接地;脚9-16分别接通道hl3-a、rxd2、txd2、key1、key3、key2、ctr1及int1;脚17通过通道beep接电阻r133接三极管q9基极,其发射极接地,基极通过电阻r158接地,集电极接蜂鸣器ha1;脚22接chg on/off通道,脚23、38、48、50-53、55、56、61分别接对应的hl通道,以接对应指示灯;脚24接通道chg current;脚26接通道mvcc,脚27-31接对应m1 ocp-m5 ocp通道;脚32、33接有电池电量保护电路;
40.电池电量保护电路包括三极管q10、q11;三极管q11基极一端通电阻r140接地,另一端通过电阻r137接脚33,发射极接地,集电极接电阻r135输出端;
41.三极管q10基极接电阻r135另一输入端,电阻r135另一输入端通过电阻r127接集电极,集电极还通过反接二极管d43接电源bat+;发射极接电阻r136输入端,电阻r136输出端一路接脚32,一路分别通过并联的电容c93、r138接地;
42.脚34-37分别接对应的通道m pwm;脚41-43分别接对应的通道k cp1、k pl1;脚44-47,分别接对应的通道l shcp、l stcp、l oe及l data;脚56、58、60、62、63、64分别接通道flchg、swim、m pwm5、txd1、rxd1、d/r-1;
43.电压转换芯片ic1、ic2、ic4;mcu控制模块ic8通过对应的mpwm接入对应的电压转换芯片ic,输出端脚5、7输出对应的通道pwm,脚6接12v电压;
44.在执行电路中,通道pwm1通过反接二极管d7、电阻r21、电容c1、电阻r1后输出给mos管q1的脚1,其脚3一路通过r29接地,一路输出电阻r27接通道m1 ocp,脚2分别继电器k1、k2的脚3,以触发继电器的电路;mos管q1的脚2通过电感l3、反接d1接mvcc电源;mvcc电源通过电容c109接地,mvcc分别继电器k1、k2的脚2;
45.继电器k1的脚4、5接k1+sig通道;继电器k2的脚4、5接k1-sig通道;继电器k1的脚1输出out m1+;继电器k2的脚1输出out m1-;
46.k1+sig通道通过电阻r6、r3接通道k1+,k1+sig通道通过电阻r18、r22接通道k1-;
47.k1m sig通过电阻r17、r20接通道k1m;
48.hl1 asig通过光耦e1接通道hl1 a;
49.二极管d7、电阻r21并联,电容c1、电阻r1输出端并联后串联。
50.传统的电动床系统只具有单一控制床板曲线的功能,而且遥控器按键操作单调,无实时查看反馈数据,属于开环系统。
51.传统的生命体征检测系统需要于集成在床垫里面,因此是与床垫“捆绑”,这样消费者要使用生命体征检测时需要更换已有的床垫,操作麻烦同时造成了资源的极大浪费。
52.针对以上问题,本专利注重功能合理整合、优化设计,并将两种系统结合在一起,实现更人性化的交互:
53.1.生命体征监测系统。体征监测带嵌入床垫下方(床垫与床板之间),安装方便、舒适、无接触。可实时检测心率、呼吸率、离床以及鼾声等信号。
54.2.设计语音控制盒,用户可使用语音对电动床控制,语音盒的加入有助于手部受
伤不方便操作遥控器的人控制。语音盒有自学习功能,可以识别不同的语言和方言。
55.3.设计带液晶显示屏遥控器。遥控器兼容传统按键控制的同时,当检测到按键按下时自动播报当前功能,有助于老人正确操作。
56.液晶显示屏可实时显示床板角度及生命体征等数据。
57.4.马达推杆设计,在传统推杆马达的结构基础上,增加离合器,在紧急情况下,可以使用拉线将齿轮与丝杆分离,实现背部快速放平的功能,有利于急救。
58.本发明设计合理、成本低廉、结实耐用、安全可靠、操作简单、省时省力、节约资金、结构紧凑且使用方便。图中字体重叠不影响保护范围。
附图说明
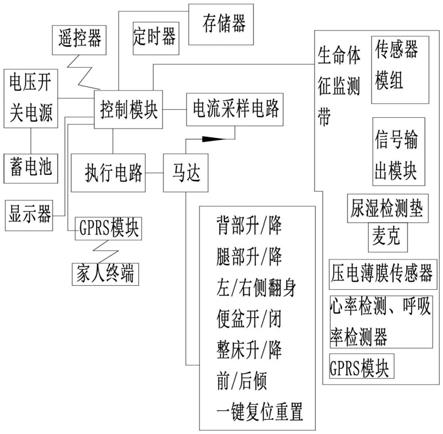
59.图1是本发明的框体图。
60.图2是本发明控制模块的电路示意图。
61.图3是本发明执行模块的电路示意图。
62.图4是本发明反馈电路的电路示意图。
63.图5是本发明继电器电压控制的电路示意图。
64.图6是本发明语音模块的电路示意图。
65.图7是本发明按键模块的电路示意图。
66.图8是本发明充电的电路示意图。
67.图9是本发明夜间指示灯的电路示意图。
68.图10是本发明电压变换的电路示意图。
69.图11是本发明无线模块的电路示意图。
70.图12是本发明led控制的电路示意图。
71.图13是本发明语音mcu的电路示意图。
72.图14是本发明led指示灯的电路示意图。
具体实施方式
73.如图1-14,本专利以智能电动床监护为模型,将床体电动控制、用户体征数据监测、人机交互相结合。本装置包括智能床结构及电控系统。
74.电控系统包括若干马达、生命体征监测带、控制盒及遥控器;马达部分:背部、腿部和翻身使用线性推杆,最大可支持8000n;整床升降使用两台三节立柱,最大可支持4000n,可以实现床体的高度变化以及前后倾斜功能。
75.搭载有控制模块的控制盒,其内置大功率宽电压开关电源,可适用于110v-230v的交流电作为输入,电压开关电源有急停开关,可实现紧急断电的功能,以给控制盒各模块供电。
76.控制模块,采用stm32单片机为核心mcu,通过继电器和mos管对马达的伸缩、速度、位置等进行控制盒检测。
77.遥控器,采用stc单片机为核心mcu,实现按键功能检测及屏幕的数据显示等;遥控器通过控制模块控制马达工作;
78.生命体征监测带,其包括传感器模组及信号输出模块;传感器模组包括压电薄膜
传感器,压电薄膜传感器通过感知微小振动,将振动信息变换成电信号,并传输到控制模块;控制模块,将电信号通过一系列的滤波、分析、运算,从中计算出生命体征的信息与数据,最后相应的数据经由输出接口发送给外部设备。
79.以上各个部分通过485接口建立起通信,各部分互相独立又相互协调,实现了系统的可扩展性和可维护性。
80.马达内部构造:电动推杆由驱动电机、减速齿轮、涡轮、蜗杆、导管、丝杆、圆管、滑块、开关、离合器等结构件组成。其中离合器与拉线通过弹簧结合在一起,可自动复位。而驱动电机内部集成霍尔传感器,通过齿轮、蜗杆、丝杆的参数将霍尔转换成对应的行程,进而再通过床架结构将行程转换为角度。此方案无需外部角度传感器,既节省硬件成本又节省了安装成本。
81.本系统采用立柱作为护理床高度的控制,运动稳定,伸缩性更强。立柱可控制床架将到50cm位置,更加有助于老年人下床。便盆马达使用快速推杆,速度可达18mm/s,在需要时可以快速响应。
82.控制模块,
83.在逻辑方面,因床架背部和腿部与翻身都有逻辑关系,既背部或者腿部升降时,翻身必须复位到床平位置,否则床架会由于结构干涉而变形。本系统中,马达带有限位开关及霍尔信号,可以实时检测马达的位置,因此当运行背部或者腿部时,控制模块先控制翻身马达到达床平位置,然后再运行背部或者腿部升降功能。翻身同理。
84.在电路方面,
85.控制马达伸出缩回要搭建h桥电路,第一种方案只采用两个继电器,第二种方案采用4个mos管,第三种方案采用两个继电器和一个mos管。由于电机是感性负载,因此启动瞬间电流很大,容易导致继电器触点黏连,且无法调速;第二种方案可以解决第一种方案继电器黏连问题,但是电机线无法短路,因此推杆自锁力降低;因此采用第三种,继电器黏连、自锁力、调速都可以兼容。采用第三种方案时,当启动时,先打开继电器再开mos管,当停止时,先关闭mos管,再关闭继电器。此方案也是本专利的一个特色。
86.电路给每路马达设计一个电流采样电路,电流会随着负载的增加而加大,当到达阈值时,可及时切断电机运行,从而保护床架及马达。
87.在软件功能,本专利产品的普通控制功能:
88.背部上升、背部下降、腿部上升、腿部下降、左侧翻身、右侧翻身、便盆开启、便盆关闭、整床上升、整床下降、前倾、后倾、一键复位等。背部可以实现0-80度调节、下曲腿可实现0-45度调节、抬腿可实现0-30度调节、翻身可实现0-30度调节、前后倾实现0-13度调节。
89.附加功能:
90.定时翻身功能:使用stm32定时器外设计时,控制在某个时间段内完成相关动作。平躺状态-》30分钟后左翻身-》做翻身保持5分钟-》恢复平躺状态-》30分钟后右翻身-》右翻身保持5分钟-》恢复平躺状态-》依次循环。
91.辅助下床功能:首先第一步按下遥控器下床键实现下床准备动作:起背到最大-》腿部放平-》整床降到最低。动作完成后,老人扶着护栏双腿着地。这时按下护栏上的下床按键(在护栏上加装此按键有利于老人操作),整床开始上升,辅助老人站立。
92.记忆位置功能:系统可通过遥控器按键(m1、m2、m3),自由设置三个固定位置,比如
tv位置,可先手动调节到一个舒适的位置,此时长按m1按键,便可记忆当前位置信息。当离开此位置时,点击m1按键,系统可自动运行到之前设置的tv位置。m2、m3同理。stm32将位置信息存入eeprom中,即使断电也不对丢失数据。
93.尿湿检测功能:在床垫臀部位置放置一块尿湿检测垫,当检测到有排泄物时,控制盒控制便盆自动打开并报警提示。
94.止鼾功能:通过麦克采集呼吸声音的大小及频率,经过单片机算法处理,将两个数据进行拟合,当数据与鼾声的匹配度达到90%时,自动调节背部电机到止鼾角度。
95.在体征监测部分,
96.生命体征监测带直接放置于现有床垫下使用,使用者感触不到监测垫的存在,其睡觉习气不受影响。伴随着生命活动,人体会发出各种各样的振动。这些振动包含了从像睡觉翻身这样大的动作,到心脏跳动,呼吸等微小的振动。压电薄膜传感器的原理则是在电阻丝的一端加特定的电压、同时在另一端采集电压,当电阻丝受到挤压或褶皱时,采集端的电压会出现变化从而产生了连续的变化曲线。本装置通过提取人体特定的振动信息,利用信号分析与数据处理技术,在完全无拘束的状态下,检测人体的心跳数,呼吸数,同时判断体动、是否在床、离床等身体动作。
97.心率检测、呼吸率检测器:通过检测人体的心率和呼吸率,组成睡眠质量报告,并且提出改善建议,指导健康睡眠。本系统自带深度学习功能,通过长期的数据采集,可以组成日报、周报、月报,准确预判睡眠走向,从而可以提前调整睡眠,科学改善睡眠。若检测到心率或者呼吸率异常,则立刻通过gprs模块向家人打电话报警。
98.离床检测:通过监视用户离床的时间点和长短来确定用户的异常离床情况并通过gprs模块向家人打电话报警。还可以检测离床次数,每次离床时间。
99.睡眠呼吸暂停检测:通过监视患者的呼吸率来判断呼吸暂停状况并通过gprs模块向家人打电话报警。
100.遥控器控制及数据显示部分:
101.采用4.3寸320*240分辨的彩屏作为显示器,使用ra8875作为液晶控制器,最大可支持800*480的分辨率。将要显示的ui内容提前存储到外置flash(w28q128)芯片中,通过ddram接口实现快速读取并显示。使用stc单片机作为mcu与之进行8080并口通信,用于控制显示屏显示的内容。内置pcf8563时钟芯片,可以实时时间。
102.显示内容,1.功能动作图片+每个部位床板角度;2.心率+呼吸率;3.离床状态指示;4.实时时间;5.电池电量;6.系统故障信息;五、语音控制模块。
103.语音识别系统采用麦克采集、信号放大、滤波等电路将电信号传送给mcu的adc,经过自主学习算法处理,可准确识别各种语言及方言。同时语音模组再由dac通道输出到功放芯tda2030a驱动喇叭播放声音,与外界进行交互。语音词条包括:背部上升、背部下降、腿部上升、腿部下降、左侧翻身、右侧翻身、整床上升、整床下降、前倾、后倾等基本功能,可根据需要定制化增减。
104.1.学习模式:进入学习模式后,语音模块自动播放语音词条,使用者跟着读三遍,然后语音模块播放第二条,使用者再次跟读三遍,依次类推,等全部词条学完后,语音模组自动提取每个指令的语音特点,进行高精度自主学习。学习完成后自动退出,并播报学习成功。
105.2.控制模式:若使用发出“背部上升”,识别成功后会播报“背部上升”,提示使用者当前要进行的动作,同时立刻通过蓝牙给控制盒发送控制指令。
106.六、低功耗控制模块:
107.本系统控制盒内部有备用蓄电池供电,当市电停电时,可用蓄电池供电操控智能床。硬件电路设计采集蓄电池放电电流检测电路及低功耗电路,当软件检测到放电电流低于下限值时,切换相关供电电路,进入低功耗模式。当再次检测到唤醒信号时,退出低功耗模式,进入正常工作状态。
108.控制盒电路主要包括dc-dc模块、作为控制系统的单片机模块、继电器模块、mos管控制模块、电压电流检测电路。单片机通过检测各种数据来控制马达运动过程,在pcb设计上增加大量保护电路,如二极管、tvs等,减少因外部故障导致的控制盒的损坏,单片机外围增加去耦电容,减少高频干扰,提高电路运行稳定性。
109.语音控制器电路包括语音核心mcuu1、5v-3v3供电模块、无线发射模块、rgb灯电路、无线充电模块接口、触摸按键模块及语音模块;
110.语音模块采用集成模组式设计,便于在不同应用的系统上直接使用。采用cortex-m4内核芯片,外围器件主要包括ci110x、spi nor flash、es8374和sgm4890等,支持单麦克风语音输入,经由ci110x识别等相关处理后,通过串口,io,iic等输出对应数据,同时传输语音信号到功放芯片驱动播音模块进行声音播放。
111.语音核心mcuu1,其脚1接地,脚2接通道gio1,脚3接通道sdio,脚4接通道sck,脚5接通道scs,脚6、7分别通过电阻r8、r9接通道rxd及txd;脚8、9接led sig通道;脚10通过电阻r7接地,脚11、12分别通过电阻r4、r5接3.3v电源;脚12-16依次接scl、key、dscl、dsda及3.3v;脚1、16之间设置有隔离电容c9;
112.使用a94b114ae为单片机,使用iic和led驱动芯片通信,使用spi与a7105无线模块通信。
113.5v-3v3供电模块,直流5v电压通过电容c6接地,通过二极管d2、分别输出4.3v及稳压器ic3的输入端,稳压器ic3的输出3v3直流电压,并通过并联的隔离电容接地;
114.采用5v外部dcdc直流供电。为保证电源质量,也可采用两级dcdc降压模块,先后降压至3.3v与1.2v,为本系统提供稳定可靠的电源。uart1-rx:模块兼容外部3.3v/5v通信电平。模块在5米远距离安静环境下识别率高达97%以上,10米超远距离语音识别也能正常工作。
115.无线发射模块,其射频芯片j3,其脚2-5分别通过gio1、sdio、sck、scs通道接语音核心mcuu1;脚1接3v3电源,脚6接地,脚1、6通过电容c4隔离;
116.采用模块式设计,自带天线。模块采用3.3v供电,io口电平为3.3v,空旷环境发射距离可到达40米。与控制器采用4线spi模式通信,待机低功耗可控制在2ua。
117.rgb灯电路,包括led驱动电路模块ic4、夜灯模块及rgb电路;
118.语音核心mcuu1通过led驱动电路模块ic4与rgb电路电连接;
119.led驱动电路模块ic4,使用is31fl3236a芯片,该芯片最多支持36个io口,与控制器采用iic通信,芯片采用5v供电,iic端口支持3.3v-5v电平信号。
120.rgb电路,直流5v通过若干rgb三色发光二极管与对应电阻接led驱动电路模块ic4的对应接口;
121.夜灯模块,直流5v通过对应的夜灯并联限流电阻后接对应的夜光灯二极管hl,接三极管q1的集电极,三极管q1的基极通过通道night light接led驱动电路模块ic4,发射极接地;led驱动电路模块ic4触发三极管q1,使得夜光灯二极管hl发光,进行夜间照明;
122.无线充电模块接口,接语音核心mcuu1的sig的信号及5v供电;
123.触摸按键模块,触摸按键芯片ic2,通过key接语音核心mcuu1,通过脚3接电容c2接地,脚3通过限流电阻r1接touch key,接插头j2;脚5接电源;
124.语音模块包括语音芯片ic1,语音芯片ic1通过脚17、18通过skp接喇叭,脚15、16接语音mic;脚4、5接语音核心mcuu1的mcu rxd及mcu txd的串口通道;
125.控制模块,包括mcu控制模块、
126.mcu控制模块ic8,以stm8s单片机为mcu作为整个系统的大脑。本系统使用了单片机的gpio、tim、adc、pwm、exti、uart等外设功能。由于单片机io数量有限,使用74hc595和74hc165为io扩展芯片,实现了多路控制以及多路检测的方案。
127.在mcu控制模块ic8中,脚1接入5v电压;脚2接d/r通道,脚4、5接地,脚6通过电容c80接地,脚7、8一路接5v一路通过电容c83接地;脚9-16分别接通道hl3-a、rxd2、txd2、key1、key3、key2、ctr1及int1;脚17通过通道beep接电阻r133接三极管q9基极,其发射极接地,基极通过电阻r158接地,集电极接蜂鸣器ha1;脚22接chg on/off通道,脚23、38、48、50-53、55、56、61分别接对应的hl通道,以接对应指示灯;脚24接通道chg current;脚26接通道mvcc,脚27-31接对应m1 ocp-m5 ocp通道;脚32、33接有电池电量保护电路;
128.电池电量保护电路包括三极管q10、q11;三极管q11基极一端通电阻r140接地,另一端通过电阻r137接脚33,发射极接地,集电极接电阻r135输出端;
129.三极管q10基极接电阻r135另一输入端,电阻r135另一输入端通过电阻r127接集电极,集电极还通过反接二极管d43接电源bat+;发射极接电阻r136输入端,电阻r136输出端一路接脚32,一路分别通过并联的电容c93、r138接地;
130.脚34-37分别接对应的通道m pwm;脚41-43分别接对应的通道k cp1、k pl1;脚44-47,分别接对应的通道l shcp、l stcp、l oe及l data;脚56、58、60、62、63、64分别接通道flchg、swim、m pwm5、txd1、rxd1、d/r-1;
131.电压转换芯片ic1、ic2、ic4;mcu控制模块ic8通过对应的mpwm接入对应的电压转换芯片ic,输出端脚5、7输出对应的通道pwm,脚6接12v电压;
132.其中,通道pwm1通过反接二极管d7、电阻r21、电容c1、电阻r1后输出给mos管q1的脚1,其脚3一路通过r29接地,一路输出电阻r27接通道m1 ocp,脚2分别继电器k1、k2的脚3,以触发继电器的电路;mos管q1的脚2通过电感l3、反接d1接mvcc电源;mvcc电源通过电容c109接地,mvcc分别继电器k1、k2的脚2;
133.继电器k1的脚4、5接k1+sig通道;继电器k2的脚4、5接k1-sig通道;继电器k1的脚1输出out m1+;继电器k2的脚1输出out m1-;
134.k1+sig通道通过电阻r6、r3接通道k1+,k1+sig通道通过电阻r18、r22接通道k1-;
135.k1m sig通过电阻r17、r20接通道k1m;
136.hl1 asig通过光耦e1接通道hl1 a;
137.二极管d7、电阻r21并联,电容c1、电阻r1输出端并联后串联;
138.本系统可控制5路马达,由于单片机端口电压为5v,继电器驱动电压是12v,无法直
接驱动继电器,因此使用uln2003电平转换芯片,将5v电平转换为12v来控制继电器开关,每一路马达使用两个继电器搭建h桥电路,可控制正反转;每一路马达使用一个mos管,可控制马达速度,mos管的开启压降是10v以上,因此单片机也无法直接驱动mos管,使用sgm48000作为pwm电平转换芯片,开关速度响应快,保证了高速控制波形不失真。每一路马达自带过流检测电路,使用0.1欧5w水泥电阻串联在电机回路中,通过检测电阻两端的电压可计算出出回路的电流,若电流过大,则断开继电器,使马达停止工作。马达位置采集使用霍尔检测方案,通过计算霍尔数可间接得出马达伸出的行程,马达自带两路霍尔,时序相位差是90度,因此可通过波形判断电机的正反转。由于霍尔信号是从马达内部传输出来,为了防止信号干扰单片机运行,使用el3h7b光耦芯片隔离信号,使用霍尔信号先经过光耦滤波隔离后,再传输到单片机io,保证了单片机的正常运行。系统带蜂鸣器,使用三极管作为驱动,单片机通过控制三极管的开关可间隔控制蜂鸣器的响与关。
139.本发明充分描述是为了更加清楚的公开,而对于现有技术就不再一一列举。
140.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;作为本领域技术人员对本发明的多个技术方案进行组合是显而易见的。而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1