用于设计正畸矫正器的方法和系统与流程
用于设计正畸矫正器的方法和系统
1.本技术是分案申请,其原案申请是申请号为pct/us2009/032335、申请日为2009年01月29日的pct申请并且于2010年09月20日进入中国国家阶段,申请号为200980109983.x,名称为“用于优化牙科矫正器几何形状的方法和系统”。
技术领域
2.本发明是关于计算机正畸术及牙医术。
背景技术:
3.在正畸术治疗中,使用各种器具来将患者牙齿自初始位置移动至最终位置。器具对牙齿施加力,藉此移动一颗或多颗牙齿或将其保持在治疗阶段的适合位置。
4.正畸术移动因牙齿位置与器具之间的一对一关系而造成,其机理是:将牙齿「挤」成新外形并保持就位,由此允许牙齿有足够的时间适应新位置,之后,再次重复此过程,在治疗计划的不同治疗阶段牙齿会逐渐地移动。
5.在当前治疗状态与后续目标或n+1治疗阶段之间的一对一关系中,牙科器具的适应可包括塑胶与牙齿几何形状之间的交互作用,该交互作用对于实现n+1牙齿位置并非最佳且通常不将该交互作用纳入该一对一关系的考量中。对于较大的牙齿移动距离而言,尤其如此,在较大牙齿移动距离的情形下,器具的变形量可导致器具中的拉伸和应力,因此,矫正器的一些区域与牙齿的关键区域和/或合意的区域并非密切地接触。因此,无法将牙齿移动至合意的目标位置。此外,还存在相反的效果,牙齿可能接触对于到达合意或目标位置产生反作用的区域。
6.另外,牙科附件主要用于改变牙冠的几何形状,以确保更好地固持牙具,如沿合意移动的方向的矫正器。一般而言,该等附件用以在牙齿的垂直表面上提供「凸起」或「倒凹」,否则牙具难以固持牙齿。
7.实现牙齿的合意移动的现有方法包括:在治疗阶段的当前位置或n位置期间,根据计划的下一个位置或n+1位置来制造牙具并将其置于牙齿上。通常而言,我们假设,牙具或其若干部分的变形所产生的力和转矩(其是因用于牙具制作的牙齿位置与牙具所定位的牙齿的位置之间的差别而造成的)会致使牙齿移动到治疗阶段中的下一个计划位置中。
8.然而,在实践中,无论在治疗中是否使用牙科附件,所产生的力和转矩的取向皆可能并非沿着既定牙齿移动的方向。此外,可仅针对牙冠而不考量牙根或其他解剖学结构来程序化或配置当前的牙齿移动。牙根或其他解剖学结构可阻碍牙冠移动,并使得阻力中心向下处于牙骨槽内。一般而言,因作用于牙冠的力而形成的对阻力中心的非有利转矩可能无法轻易地平衡。此外,随着治疗过程期间的牙齿移动,牙具的变形逐渐减小,使得所施加的力亦随的减弱。
技术实现要素:
9.在一实施例中,所提供的方法和装置包括:确立牙齿的初始位置;确定牙齿在治疗
计划中的目标位置;计算与自初始位置至目标位置的牙齿移动相关联的移动向量;确定对应于移动向量相关联的多个分量;以及确定一个或多个相应附连器件相对于牙齿表平面的一个或多个对应位置,以使该一个或多个附连器件与牙具相啮合。
10.本文中使用的附件可为可附连至牙齿的任何形式的材料,其或使用模板而预形成,或以无定形形式而预形成,附连至牙齿的表面。可使用粘结材料将该附件设置于牙齿表面上,或可将粘结材料自身作为附件设置于牙齿表面上。
11.在参阅本发明实施方式和附图之后,便可理解本发明的此等及其他特征和优势。
附图说明
12.图1a显示一例示性牙科数据挖掘系统;
13.图1b显示一个或多个牙具的性能分析;
14.图1c显示一个数据挖掘系统实施例中使用的各种移动型数据;
15.图1d显示一个或多个牙具的性能分析;
16.图1e-1f显示用以产生治疗计划的集群器的各个实施例;
17.图2a是根据本发明的载明治疗过程的流程图,其包括用于计算矫正器形状的子过程;
18.图2b是用于计算矫正器形状的流程图;
19.图3是用于建立有限元模型的子过程的流程图;
20.图4是用于计算矫正器变化的子过程的流程图;
21.图5a是用于计算矫正器形状变化的子过程的流程图;
22.图5b是用于计算矫正器形状变化的子过程的流程图;
23.图5c是用于计算矫正器形状变化的子过程的流程图;
24.图5d是图解图5b子过程的作业的示意图;
25.图6是计算若干组矫正器的形状的流程的流程图;
26.图7是统计根模型的例示性图表;
27.图8显示根模型建立的例示性图表;
28.图9显示牙齿的ct扫描的例示性图表;
29.图10显示了显示牙齿的例示性使用者介面;
30.图11a-11b分别图解带有定位后的牙具的初始牙齿位置以及所获得的非合意力向量;
31.图11c-11d分别图解给牙具添加离隙以对牙齿周围的非合意力向量形成反作用、以及所获得的牙具对牙齿施加的合意预定力;
32.图12图解修改后的牙具几何形状,其中包括附加的形状修改以去除牙具与牙齿之间之间隙;
33.图13图解基于牙齿治疗计划的扫描几何形状来构造牙具的几何外形;
34.图14a-14b图解用于使牙齿转动的牙科附件定位;
35.图15图解用于使牙齿倾斜的牙科附件定位;
36.图16图解用于使牙齿形成角度的牙科附件定位;
37.图17a-17b分别图解用于颊面平移和舌面平移的牙科附件定位;
38.图18a-18b分别图解用于近中平移和远中平移的牙科附件定位;
39.图19a-19b分别图解用于突出和下压的牙科附件定位;
40.图20图解牙具及附件的互补啮合;
41.图21是图解优化牙具几何外形的流程图;
42.图22是图解牙科附件定位的流程图;
43.图23是图解基于对有效牙齿表面进行计算而使牙齿沿预定方向移动预定距离的方法的流程图;
44.图24是图解确定是否需要附件由此获得牙齿充足有效表面积的方法的流程图;
45.图25是计算牙具形状的过程的流程图;
46.图26显示牙冠点自第一阶段至第二阶段的轨迹;
47.图27显示牙齿的有效表面和阻力表面;
48.图28演示藉由添加附件使得牙齿的有效面积增大;且
49.图29显示带有附件及矫正器(其带有匹配于附件的脊状部分)的牙齿的剖面。
具体实施方式
50.现在,三维正畸治疗计划工具(除其他以外,如aligntechnology,inc.的软件或可自emodels和orthocad处购得的其他软件)使得数位治疗计划成为可能。此等技术允许临床医师使用实际的患者齿系作为自订治疗计划的起始点。相比于2003年8月21日提出的美国专利申请案序号10/640,439及2002年8月22日提出的美国专利申请案序号10/225,889中所论述的原始数位治疗计划,自align technology公司购得的软件技术是使用针对患者的数位模型来制定治疗计划,然后扫描所实现的治疗结果或实际的治疗结果来评估结果的「治疗成功程度」。数位治疗计划和结果评估所存在的问题是数据冗余,并且缺乏以个体患者水平评估治疗成功度的标准和有效的方法。使用牙科数据挖掘系统来分析信息。
51.图1a显示一个例示性牙科数据挖掘系统。在该系统中,牙科治疗数据集及结果数据集1存储在数据库或信息库2中。数据挖掘软件3提取数据,由此产生结果4。数据挖掘软件可询问在数据库2中捕获和/或更新的信息,并且可产生与患者牙病以及牙具解决方案相关的输出数据流。请注意,最为有利地是,可将数据挖掘软件的输出作为后续输入以自反射方式馈送至至少数据库及数据挖掘相关性算法。
52.图1a的数据挖掘系统的结果是用于定义器具构形或定义器具构形的改变,以逐步地移动牙齿。牙齿移动通常是与正畸治疗相关联的移动,包括全部三个正交方向的平移、牙齿中心线沿两个正交方向的转动(其中转动轴垂直于垂直中心线)(「根成角」和「转矩」)、以及牙齿中心线沿正畸方向的转动(其中轴线平行于垂直中心线)(「纯转动」)。
53.在一个实施例中,数据挖掘系统捕获3-d治疗计划的移动、起始位置及最终实现的牙位置。该系统将结果与计划相比较,且可使用任何治疗方法来实现该结果,该等治疗方法包括:可移除式器具及固定式器具(如正畸托架和钢丝)、或甚至其他牙科治疗(如将实现结果与计划相比较以便进行正畸手术、牙周病治疗及恢复性治疗)。
54.在一实施例中,牙齿重迭工具是用以匹配每一牙齿牙弓扫描的治疗档案。精化扫描(后续进展)重叠在初始扫描上,以基于牙齿解剖结构和齿座标系统达成匹配。在两个牙弓中的牙齿匹配之后,重叠工具需要参照以便将上牙弓与下牙弓联系起来。当选择选项「统
计过滤」时,重迭工具藉由如下方式量测每一牙齿的移动量:先作为参照去掉移动量大于标准偏差而高于或低于全部牙齿移动平均量的牙齿移动(由当前阶段与前一阶段之间的位置差确定)。然后,选择其余牙齿作为参照而量测每一牙齿的移动。
55.图1b显示一个或多个牙具的性能分析。在散布图中,相对于「目标」移动绘制出所「实现」的移动,并产生趋势线。图中显示「散布」图以演示「散布」数据点的位置,并产生趋势线以显示牙具的性能。在一实施例中,趋势线选择为线性趋势线(其可为曲线);如此,趋势线是所有「散布」数据的最佳拟合直线。矫正器的性能表示为趋势线的斜率。y轴截距是模拟当佩戴矫正器时所发生的偶然移动。可预测性是由r2进行量测,r2是由「实现」数据和「目标」数据的回归计算而获得。
56.图1c显示一个数据挖掘系统实施例中使用的各种移动型数据。例示性数据集覆盖:扩张/收缩(+/-x平移)、近中/远中(+/-y平移)、下压(-z平移)、突出(+z平移)、倾倒/成角(x转动)、转矩/倾斜(y转动)及纯转动(z转动)。
57.图1d显示一个或多个牙具的性能分析。对于图1d中所示的运动类型,所实现的运动是该特定数据集的目标运动的约85%。
58.如图1d中显著的显示,在诸多阶段处,实际的牙齿移动一般都会滞后于目标牙齿移动。在藉由串接的聚合物器具进行治疗的情形下,该种滞后在治疗设计中起到重要作用,此乃因牙齿移动及负面结果(患者的不适)两者肯定会随差异程度的不同而不同。
59.在一实施例中,藉由考量目标牙齿位置与实际牙齿位置的统计偏差,如步骤170(图2a)和步骤232(图2b)中的临床参数便更加准确。例如,由于当前的目标移动未充分实现的计算概率很大,因此可减少后续的移动目标,因而导致后续移动阶段需完成为先前阶段既定的工作量。类似地,目标移动可能尤其在先前阶段中超越合意位置,使得预期的实际移动得到更佳的控制。该实施例牺牲最小化来回移动时间的目标,以换取实现目标末尾阶段结果的较高概率。该方法是针对若干类似患者案例的群组在治疗计划内达成。
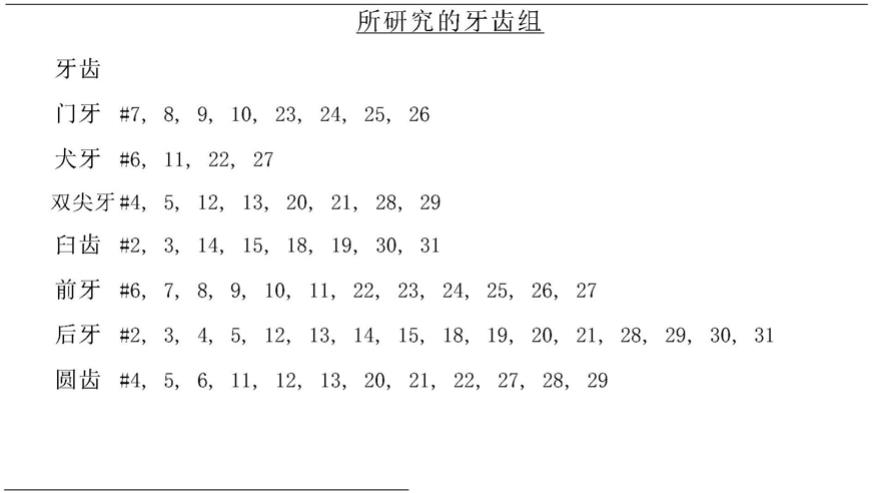
60.表1显示一实施例中的牙齿分组。表2中指示牙齿移动的符号约定。表3中演示所选60个牙弓的不同牙齿移动,其中性能以降序分类。器具性能可分为4个单独的组:高(79-85%)、平均(60-68%)、低于平均(52-55%)以及不足(24-47%)。表4显示移动可预测性的排名。可预测性分为3组:高预测性(0.76-0.82)、可预测性(0.43-0.63)及不可预测性(0.10-0.30)。对于特定的数据集,例如,研究结果如下:
61.门牙下压和前牙下压性能为高性能。门牙下压的范围约为1.7mm,且前牙下压的范围约1.7mm。这些移动可预测性高。
62.犬牙下压、门牙转矩、门牙转动及前牙转矩性能为平均性能。犬牙下压的范围约为1.3mm,门牙转矩的范围约为34度,门牙转动的范围约为69度,且前牙转矩的范围约为34度。该等移动或为可预测,或为高预测性。
63.双尖牙倾倒、双尖牙近中、臼齿转动及后牙扩张性能低于平均。双尖牙近中的范围约为1毫米,双尖牙倾倒的范围约为19度,臼齿转动的范围约为27度,且后牙扩张的范围约为2.8毫米。双尖牙倾倒和双尖牙近中为不可预测移动,而其余为可预测移动。
64.前牙和门牙突出、圆齿和双尖牙转动、犬牙倾倒、臼齿远中以及后牙转矩性能为不足性能。前牙突出的范围约为1.7毫米,门牙突出的范围约为1.5mm,圆齿转动的范围约为67度,双尖牙转动的范围约为63度,犬牙倾倒的范围约为26度,臼齿远中的范围约为2毫米,且
后牙转矩的范围约为43度。除双尖牙转动为可预测移动(但其产生的性能较低)的外,所有该等移动皆为不可预测移动。
65.表1
[0066][0067]
表2
[0068][0069]
表3
[0070][0071]
表4
[0072][0073]
在一实施例中,可运用数据驱动分析器。该等数据驱动分析器可包含多种模型,如参数统计模型、非参数统计模型、集群模型、最邻近模型、回归方法以及工程设计(人工)神经网络。在作业的前,使用一个或多个训练对话来建立数据驱动分析器或模型。用以在该等回话中建立分析器或模型的数据通常被称为训练数据。由于是藉由仅检查训练实例的方式来开发数据驱动分析器,因而训练数据的选择会显著地影响数据驱动分析器的准确性及学习速度。一种以前使用的方式会产生称为用于训练目的的测试集的单独数据集。该测试集用以避免模型或分析与训练数据的过度拟合。过度拟合是指分析器过度存储训练数据,以致于其无法拟合或分类不可见数据。通常而言,在分析器或模型的构造期间,利用测试集对分析器的性能进行测试。重复地实施分析器或模型参数的选择,直至分析器在对测试集进行归类方面的性能到达最佳点为止。此时,训练过程完成。作为使用独立训练及测试集的替代方案是使用称为交叉验证的方法。交叉验证可用以为参数分析器确定参数值,或为非参数分析器确定模型。在交叉验证中,选择一个训练数据集。接下来,藉由在重复过程中向分析器提交作为测试集的训练数据的不同部分,由此建立多个不同的分析器或模型。然后,基于所有模型或分析器的组合性能,确定参数或模型结构。根据交叉验证方法,通常地,使用确定的最佳模型结构,用数据再次对分析器或模型进行训练。
[0074]
在一实施例中,数据挖掘软件3(图1a)可为在数据库2(图1a)上抓取用于索引的数据的「蜘蛛」或「爬虫」。在一实施例中,实施集群作业以探测数据中的模式。在另一实施例中,使用神经网络来辨识每一模式,此乃因神经网络在辨识牙科治疗模式方面具有很强的健硕性。一旦治疗特征得到表征,则神经网络将输入的牙科信息与神经网络辨识器所知的治疗词汇表的存储模板进行对比。除其他以外,辨识模型可包括:隐藏式马可夫模型(hidden markov model,hmm)、动态程序化模型、神经网络、模糊逻辑、或模板匹配器。该等模型可单独使用或可组合使用。
[0075]
动态程序化考量了经由n个点的m个「帧」(frame)的所有可能路径,为达成自任一给定帧k的任一点i至下一帧k+1的任一点j的过渡,需付出指定的代价。由于当前点至下一点的最佳路径独立于该点以外所发生的事件,因而经由i(k)结束于j(k+l)的路径的最小总体代价[i(k),j(k+l)]是其自身过渡的代价加上通往i(k)的最短路径的代价。优选地,可将前趋路径值保存在m
×
n阵列中,且可将累计代价保存在2
×
n阵列中以便包含前一个可能的相邻列和当前列的累计代价。然而,该方法需要相当的计算资源。
[0076]
动态程序化要求巨大的计算量。为使辨识器找到帧序列与节点模型序列之间的最佳时间对准,其必须参照多个节点模型对大多数帧进行比对。降低动态程序化所需的计算量的一种方法是使用修剪。若该比对的局部概率值低于给定阈值,修剪则会终止参照给定治疗模型对牙科治疗信息的给定部分进行动态程序化。此将大大地降低计算。
[0077]
隐藏式马可夫模型被视为是动态程序化的一般性概括,在优选实施例中,使用隐藏式马可夫模型来评价观测序列o(1)、o(2)、
…
、o(t)、
…
、o(t)的发生概率,其中每一观测o(t)可为根据vq方法的离散符号或可为连续向量。可将观测序列的模型建立为下部马可夫链(其带有非直接观测到的状态过渡)的概率函数。
[0078]
在该优选实施例中,使用马可夫模型,以建立治疗观测序列的概率的模型。状态间的过渡由过渡矩阵a=[a(i,j)]来表示。过渡矩阵的每一项a(i,j)是在该模型处于状态i的情形下实现到状态j的过渡的概率。该模型的输出符号概率由函数集b=[b(j)]表示,其中输出符号矩阵的项b(j)是在模型处于状态j的情形下以指定值o(t)评价时返回输出观测o(t)的概率的函数。该第一状态始终被约束为马可夫链的第一时间帧的初始状态,仅由左至右的状态过渡的规定集为可行。预定的最终状态的定义是无法发生至其他状态的过渡。
[0079]
在一实施例中,过渡限制为重新输入状态或条目至下两个状态中的一个。该等过渡在模型中定义为过渡概率。例如,当前具有处于状态2中的特征信号帧的治疗模式重新输入状态2的概率为a(2,2),输入状态3的概率为a(2,3),且输入状态4的概率为a(2,4)=l-a(2,2)-a(2,3)。输入状态1的概率a(2,l)或输入状态5的概率a(2,5)为0,且概率a(2,l)至a(2,5)的和为1。尽管优选实施例将流程图限制于当前状态或限制于下两个状态,熟悉此项技术者仍可藉由更加灵活的过渡限制来建立hmm模型,但自任何状态发生的过渡的全部概率的和仍为1。
[0080]
在模型的每一状态j中,可藉由预定义输出符号集中的一个来识别当前特征帧,或以概率的方式对其进行标记。在该情形下,输出符号概率b(j)(o(t))对应于特征帧符号为o(t)的模型所指派的概率。模型的排列是过渡概率的矩阵a=[a(i,j)]以及计算b=[b(j)(o(t))]的技术。
[0081]
在一实施例中,马可夫模型由多个训练模式序列形成用于参照的模式,且输出符号概率是多元高斯函数概率密度。牙科治疗信息传递穿过特征提取器。在学习期间,所获得的特征向量串列由参数估计器处理,该参数估计器的输出提供至隐藏式马可夫模型。隐藏式马可夫模型用以参照模式模板集,每一模板代表参照治疗模式的词汇集当中的一个识别模式。接下来,利用马可夫模型参照模板,以基于由每一马可夫模型参照模式模板产生观测的概率,将观测序列归类到参照模式中的一个内。在辨识期间,则可将未知的模式识别为在可能性计算器中概率最高的参照模式。
[0082]
hmm模板具有多个状态,每一状态皆具有一个离散值。然而,由于治疗模式特征可
具有对比于单个值的动态模式,因而在一实施例中,于hmm的前端处添加神经网络可能够以动态值表示各状态。神经网络的输入层包括输入神经元。输入层的输出分配至中间层内的所有神经元。类似地,中间层的输出分配至所有输出神经元,该等输出神经元与hmm的内部状态一一对应。然而,每一输出皆具有相对于其自身或相对于其他输出的概率,因此形成修改的hmm。由此形成的hmm的每一状态皆能回应于特定的动态信号,因而得到更为健硕的hmm。作为另一选择,神经网络可单独使用,而无需求助于hmm架构的过渡概率。
[0083]
图1a的输出流或结果4用作反馈,由此改善牙具的设计及/或医师对牙具的使用。例如,数据挖掘结果可用以基于阶段性方法来评价性能,用以基于治疗方法对器具性能指数进行对比,并用以评价性能由此对比牙齿上的不同附件形状和位置。
[0084]
由于能针对庞大的治疗结果群组研究对于牙齿的具体功效及产品性能,因而能在两个或更多个案例群体之间作出统计显著的对比。倘若所研究的两个群组在治疗方法、器具设计或制造协定方面存在差异,则数据输出所呈现的在产品性能方面的差异可归因于方法、设计或制造协定。该最终结果是一种反馈机制,其使得临床医师或制造商能够基于样本尺寸相当庞大的性能数据、使用客观的可量测数据来优化产品设计以及使用。
[0085]
正畸治疗理论并未达成统一的认识,且实际治疗及结果受到附加不确定因素的限制,该等不确定因素为患者变数的量测、与未量测的患者变数的关系、以及患者遵循程度不同。因此,不同的临床医师可能针对一个患者优选不同的治疗计划。因此,一个治疗计划可能并未为所有临床医师所接受,此乃因没有为所有人统一接受的「正确」治疗计划。
[0086]
藉由针对临床医师的偏好定制治疗参数,接下来的几个实施例可达成临床医师及患者的更佳满意度。该系统藉由以统计方式观测临床医师的治疗历史,由此探测治疗偏好方面的差异。例如,在牙齿相对拥挤的情形下,临床医师会实施双尖牙拔除的可能性会不同。即使当不具备关于给定临床医师的过往治疗的充分记录时,仍可对其他预测变量(如地理位置、与训练相关的变量或行医经验和性质)实施集群,以统计观测治疗参数的显著差异。
[0087]
数据挖掘可发现不同临床医师针对可比对患者实现的不同治疗结果的统计显著模式。例如,集群在一起的患者案例可相对于不使用集群技术的临床医师系统地减少并发症。数据挖掘工具所探测的该种差异可用作反馈给更多行医经验不足的临床医师的标记,并且还可用作向行医经验丰富的临床医师恳求其使用的治疗差异的标记。
[0088]
在一实施例中,集群技术与先前完成的案例配合使用,以对治疗并发症及结果进行分类。然后,在每一群组内建立风险概率模型。然后,基于治疗前变量的相似性,将新案例分配至相同的群组。然后,将治疗完成后的每一患者群组内的风险与新案例配合使用,以预测治疗结果及并发症的风险。然后,对高风险患者加以标记以引起特别注意,可能地包括治疗计划中的附加步骤或附加的临床干扰。
[0089]
在另一实施例中,按照观测的临床治疗偏好将行医者集群分组,且在每一组中调节治疗参数以更加密切地符合所观测到的治疗偏好。然后,基于与已知治疗历史的群组的已知变量相似性,将没有观测历史的行医者指派成若干组。
[0090]
图1e显示用于集群实践的例示性过程。首先,该过程基于临床医师治疗的历史对治疗实践(如治疗偏好、结果及人口统计变量和实践变量)进行集群(20)。接下来,该系统建立关于每一群组内的优选临床约束的模型(22)。接下来,该系统基于人口统计变量及实践
变量将没有治疗历史的临床医师指派至20中的群组(24)。在一实施例中,该系统使用针对群组的临床约束(26)在每一群组内单独实施过程100(参见图2a)。另外,该系统会随到达的新治疗数据和结果数据而更新群组和群组指派(28)。
[0091]
图1f显示数据挖掘系统产生建议治疗的另一实施例。首先,该系统基于详细跟踪数据、诊断、治疗参数和结果以及人口统计变量,识别/集群具有详细跟踪(如多个高解析度扫描)的患者历史(40)。在每一群组内,该系统建立关于既定位置与由跟踪数据获得的实际位置间差异的模型(42)。此外,在每一群组内,该系统建立关于特殊非合意结果的风险模型(44)。在集群的第二层处,基于可获得的变量,集群带有较少详细跟踪数据的患者历史。第二层的集群具有足够的局部性,因而可将较多数量的第二层群组中的每一个指派至在40中计算的群组或将其视为新的群组(46)。该系统藉由来自步骤46的群组的附加记录对步骤42的模型进行精化(48)。其亦可藉由来自步骤48的群组的附加记录对步骤44的模型进行精化(50)。在集群的第三层处,然后,该系统基于诊断、人口统计及初始身体检查将新患者指派至步骤46的群组(52)。在每一步骤52的群组内,该系统建立关于既定位置与实际位置之间预期差异的模型(54)。自步骤54起,该系统在相关处(包括图2b的232和250)使用经修正的预期位置信息(67)。另外,在每一步骤52的群组内,该系统建立关于非合意结果风险模型(56)。自步骤56起,该系统亦对需要特别注意和临床约束的案例(如在图2b和2a的204和160中)加以标记(69)。然后,该过程自订针对每一步骤52的群组的治疗计划(58)。接下来,该系统重复地收集数据(61),并将数据循环回至识别/集群患者历史(40)。另外,可对群组进行修正及重新指派(63)。该系统亦连续地识别不具有良好图像的群组,以便进行附加跟踪分析(65)。
[0092]
在临床治疗环境中,在牙齿移动可能的每一阶段都获取或处理高解析度的数据并非成本有效的做法。例如:
[0093]
·
患者在各次临床就诊期间可能使用若干个器具。
[0094]
·
某个给定患者可能仅提供一组牙齿印模。
[0095]
·
辐射的问题可能限制使用ct或x射线扫描的次数。
[0096]
·
临床医师一般没有时间报告关于每次就诊时每颗牙齿的详细空间信息。
[0097]
由于此等和其他限制,必需基于局部信息来设计治疗计划。
[0098]
在一实施例中,藉由使患者与收集具备详细跟踪信息的代表性样本之间的预测特征相匹配,由此大致地近似表达丢失的信息。在该情形下,基于预计不良的治疗结果,对患者加以标记以请求跟踪信息,如收集和分析附加的牙齿印模组。然后,使用获得的信息以精化患者群组以及随后指派至群组的患者治疗。
[0099]
一般而言,使用上述数据挖掘系统,扫描患者数据并对数据进行分析。该系统提出关于治疗计划的建议,供牙科行医者批准。牙科行医者可接受治疗计划或请求对治疗计划进行修改。一旦治疗计划得到批准,便可开始制造器具。
[0100]
图2a图解例示性过程100的概括性流程,过程100用以定义并产生复位器具,以对患者进行正畸治疗。过程100包括即将描述的方法,并且过程100适合于本发明的装置。有利地,该过程的计算步骤是构建为在一个或多个习用数位电脑上执行的电脑程序模块。
[0101]
作为初始步骤,先获取患者牙齿或口组织的模子或扫描(110)。该步骤一般涉及对患者牙齿和牙龈进行取模,且另外或作为另一选择,可涉及蜡咬、直接接触式扫描、x射线成
像、层析成像、超声成像以及用于获得关于牙齿、颚、牙龈和其他正畸相关组织的位置及机构信息的其他技术。由以此获得的数据推导出数位数据集,该数位数据集代表患者牙齿和其他组织的初始排列(即,治疗前的排列)。
[0102]
对该初始数位数据集进行处理以对各组织构成进行彼此分段(步骤120),该初始数位数据集可包括来自扫描作业的原始数据以及由该原始数据导出的表面模型的数据两者。具体而言,在该步骤中,制作数位表示各牙冠的数据结构。有利地是制作整付牙齿的数位模型,其中包括量测的或推测的隐藏表面和根结构、以及周围骨胳及软组织。
[0103]
牙齿的合意最终位置(即,正畸治疗合意及既定的最终结果)可由临床医师处以处方的形式接收到,可由基本正畸原则计算而得,或可由临床处方以计算方式推测(步骤130)。藉由关于牙齿的合意最终位置及牙齿自身的数位图像的规范,可指定每一牙齿的最终位置和表面几何形状(步骤140),从而在治疗的合意末端(end)处形成完整牙齿模型。一般而言,在该步骤中指定每颗牙齿的位置。该步骤的结果是数位数据结构集,该数位数据结构集表示经建模的牙齿相对于假设稳定组织的正畸正确复位。该牙齿和组织两者皆表示为数位数据。
[0104]
具备每颗牙齿的起始位置和最终位置之后,接下来,该过程将定义每颗牙齿运动的牙齿路径。在一实施例中,对牙齿路径进行总体优化,以使牙齿以最快且来回移动量最小的方式移动,以便将牙齿自其初始位置带到其合意最终位置。(来回移动是牙齿沿着朝向合意最终位置以外的任何方向的任何移动。有时,必需藉由来回移动方可允许牙齿彼此地移动。)对牙齿路径进行分段。对该等区段进行计算,以使区段内的每一牙齿运动皆保持在线性平移和转动平移的阈值极限范围内。以此方式,每一路径区段的端点皆可构成临床上可行的复位,且区段端点的总和构成临床上可行的牙齿位置序列,由此使得自序列中的一个点至下一个点的移动不会导致牙齿的碰撞。
[0105]
在一个实施方案中,藉由基于待使用器具的性质的预设值,对线性和转动平移的阈值极限进行初始化。可使用针对患者的数据计算更为特别定制的极限值。亦可基于器具计算的结果更新极限值(步骤170,稍后描述),该器具计算可确定:在沿着一个或多个牙齿路径的一个或多个点处,器具所能产生于牙齿和组织之后有构形上的力无法实现一个或多个牙齿路径区段所代表的复位。藉由该信息,定义分段路径(步骤150)的子过程可重新计算路径或受到影响的子路径。
[0106]
在该过程的各阶段,且更具体而言在定义分段路径之后,该过程可以与且一般会与负责患者治疗的临床医师交互作用(步骤160)。可使用经程序化以接收牙齿位置及模型的客户端进程以及来自伺服电脑或伺服进程(其中构建了过程100的其他步骤)的路径信息来构建临床医师的交互作用。有利地,客户端进程程序化为允许临床医师显示位置及路径的动画,并允许临床医师重设一个或多个牙齿的最终位置并指定即将施加于分段路径的约束。若临床医师做出任何此等改变,则会再次实施定义分段路径的子过程(步骤150)。
[0107]
分段牙齿路径以及相关联的牙齿位置数据是用以计算临床上接受的器具构形(或器具构形的接连变化),该器具构形将在路径区段所指定的步骤中沿着定义的治疗路径移动牙齿(步骤170)。每一器具构形代表沿着患者治疗路径的一个步骤。对该等步骤进行定义及计算,以使每一离散位置可在前一个离散步骤实现的牙齿位置的基础上继而实现直线牙齿移动或简单转动,且以使每一步骤所需的复位量涉及作用于患者牙系上的正畸最佳力
量。如同路径定义步骤一样,该器具计算步骤亦可包括交互作用且甚至包括与临床医师进行的重复交互作用(步骤160)。下文将更加完整地描述构建该步骤的过程步骤200的作业。
[0108]
器具定义经计算之后,过程100可进行至制造步骤(步骤180),其中制造该过程所定义的器具,或产生可由手动过程或自动过程使用的电子信息或列印信息,以定义器具构形或定义器具构形的改变。
[0109]
图2b图解过程200,过程200构建上文提及的美国专利第5,975,893号中所述的该种聚合物壳体矫正器的器具计算步骤(图2a的步骤170)。该过程的输入包括:初始矫正器形状202、各种控制参数204以及当前治疗路径区段206末端处的牙齿合意末端构形。其他输入包括:就位于颚内的牙齿的数位模型、颚组织模型以及关于初始矫正器形状和矫正器材料的规范。使用该输入数据,该过程建立关于矫正器、牙齿和组织(其中矫正器就位于牙齿的上)的有限元模型(步骤210)。接下来,该过程对矫正器、牙齿和组织的复合有限元模型应用有限元分析(步骤220)。该分析会一直运行直至到达退出条件,到达退出条件时,该过程会评价牙齿是否到达当前路径区段的合意末端位置,或其位置是否充分靠近合意末端位置(步骤230)。若牙齿并未到达可接受的末端位置,则该过程会计算新的候选矫正器形状(步骤240)。若到达可接受的末端位置,则对该有限元分析所计算的牙齿运动进行评价以确定其在正畸术上是否可接受(步骤232)。若未到达可接受的末端位置,则该过程仍继续进行以计算新的候选矫正器形状(步骤240)。若该等运动在正畸术上可接受且牙齿已到达可接受位置,则对当前矫正器形状与先前计算的矫正器形状进行对比。若当前形状是目前为止的最佳解决方案(决定步骤250),则将该形状储存为目前为止的最佳候选(步骤260)。若并非如此,则将其储存在可选步骤中作为可能的中间结果(步骤252)。若当前矫正器形状是目前为止的最佳候选,则该过程确定其是否足够好到可接受的程度(决定步骤270)。若可接受,则退出该过程。否则,该过程继续,并计算另一候选形状(步骤240)以供分析。
[0110]
可使用可自众多供应商处购得的电脑程序应用软件来建立有限元模型。为建立实体几何模型,可使用电脑辅助工程分析(cae)或电脑辅助设计(cad)程序,如可自加利福利亚州圣拉菲尔的autodesk公司购得的软件产品。为建立有限元模型并对其进行分析,可使用众多供应商的程序产品,其中包括:可自依阿华州科尔维尔的cadsi处购得的polyfem产品、可自美国麻州waltham的parametric technology corporation公司处购得的pro/mechanica仿真软件、可自俄亥俄州辛辛那提的structural dynamics research corporation(sdrc)公司处购得的i-deas设计软件产品、以及可自加利福尼亚州洛杉矶的macneal-schwendler corporation公司处购得的msc/nastran产品。
[0111]
图3显示过程300,过程300是建立可用以实施过程200(图2)的步骤210的有限元模型。模型建立过程300的输入包括描述牙齿和组织的输入数据302及描述矫正器的输入数据304。描述牙齿302的输入数据包括:牙齿的数位模型;刚性组织结构的数位模型(若存在);高粘度流体形状和粘度的规范,其建立关于牙齿所嵌入的以及牙齿所连接的基质组织的模型;以及指定模型元件的非移动边界的边界条件。在一个实施方案中,该等模型元素仅包括:牙齿的模型、高粘度嵌入基质流体的模型以及实际上定义建模流体所盛装的刚性容器的边界条件。请注意,流体特性可随患者群组不同而不同,如随着年纪不同而不同。
[0112]
建立牙齿及组织的初始构形的有限元模型(步骤310),并且将该有限元模型高速缓存起来,以便在该过程稍后的重复中再次使用(步骤320)。当牙齿和组织初始构形的有限
元模型建立完成时,建立聚合物壳体矫正器的有限元模型(步骤330)。该模型的输入数据包括指定矫正器的制作材料以及矫正器形状的数据(数据输入304)。
[0113]
然后,对模型矫正器进行计算操控,以便将其放置于模型颚中的建模牙齿上,以建立就位矫正器的复合模型(步骤340)。可选地,对用以使矫正器(包括任何附连至牙齿的任何硬体)变形从而配合在牙齿上所需的力进行计算并将其用作量测特定矫正器构形的可接受性的质素因数。可选地,根据基于治疗前的步骤以及其他患者信息的概率模型,对所使用的牙齿位置进行估计。然而,在一较为简单的替代方案中,藉由如下方式建立关于矫正器变形的模型:对矫正器内部施加足够大的力以使矫正器大到足以配合在牙齿上;将模型矫正器放置于复合模型中的模型牙齿上;将模型牙齿和组织的条件设为无限刚性;以及允许模型矫正器松弛地进入到固定牙齿上的位置内。建立关于矫正器和牙齿表面的模型,以使该阶段处的交互作用没有摩擦,由此使得矫正器模型实现模型牙齿上的正确初始构形,之后开始有限元分析以找到关于复合模型的解决方案并且计算牙齿在受到变形矫正器影响下的移动。
[0114]
图4显示过程400,过程400是用于计算可在过程200(图2b)的步骤240的矫正器计算中使用的下一矫正器形状。使用各种输入来计算下一候选矫正器形状。该等输入包括:由复合模型的有限元分析解决方案所产生的数据输入402以及当前牙齿路径所定义的数据404。由该有限元分析导出的数据402包括:发生牙齿仿真复位所用的实耗时间量;该分析所计算的实际末端牙齿位置;施加至每一牙齿的最大线性力和扭转力;每一牙齿的最大线速度和角速度。来自输入路径信息的输入数据404包括:当前路径区段的初始牙齿位置;当前路径区段末端处的合意牙齿位置;每一牙齿的最大允许移位速度;以及每一牙齿的最大允许的每种力。
[0115]
若先前评价的矫正器经发现违反一个或多个约束,则过程400可选地使用附加的输入数据406。该数据406可包括用以识别先前评价的矫正器违反约束以及任何识别的次佳性能的信息。另外,过程400可使用与先前牙科器件所违反的约束以及其次佳性能有关的输入数据408。
[0116]
接收到初始输入数据之后(步骤420),该过程会关于模型中的可移动牙齿进行重复作业。(一些牙齿可能被识别并约束为不可移动。)若由先前所选的矫正器选择的当前牙齿运动的末端位置和动力学为可接受的(决定步骤440的「肯定性」支路),则该过程会继续选择考量下一牙齿(步骤430),直至所有牙齿得到考量(自步骤430至步骤470的「完成」支路)。否则(自步骤440起的「否定性」支路),计算矫正器在当前所选牙齿区域中的改变(步骤450)。如图所述,该过程然后往回移动以选择下一当前牙齿(步骤430)。当所有牙齿皆经过考量时,参照先前定义的约束(其实例上文已提述)来评价对矫正器作出的整体改变(步骤470)。可参考各种另外的考量(如可制造性)来定义约束。例如,可将约束定义为设定矫正器材料的最大或最小厚度,或设定矫正器在牙冠上的最大或最小覆盖度。若满足矫正器约束,则应用改变以定义新的矫正器形状(步骤490)。否则,修订矫正器的改变以便满足约束(步骤480),并且应用修订的改变来定义新的矫正器形状(步骤490)。
[0117]
图5a图解计算当前牙齿区域中的矫正器改变的步骤的一个实施方案(步骤450)。在该实施方案中,使用基于规则的推断引擎456以处理先前描述的输入数据(输入454)以及规则库452中的一组规则452a-452n。推断引擎456及规则452定义产生系统,该产生系统当
应用于真实输入数据时会产生一组输出结论,该组输出结论会指定对矫正器在当前牙齿区域中的改变(输出458)。
[0118]
规则452a...452n具有传统的两部分形式:一个定义条件的条件部分;以及一个在条件满足的情形下定义所断言的结论或动作的结论部分。条件可为简单的条件,或者可为多个断言的复杂逻辑合取或逻辑析取。定义对矫正器做出的改变的例示性规则组包括如下:若牙齿运动过快,则反向于运动的合意方向,给矫正器添加驱动材料;若牙齿运动过慢,则添加驱动材料以对牙齿位置进行过校正;若牙齿离合意末端位置过远,则添加进行过校正的材料;若牙齿移动超出合意末端位置过远,则添加在牙齿与矫正器相遇处使矫正器硬化的材料;若添加的驱动材料量到达最大量,则添加用以过校正牙齿复位的材料而不添加驱动材料;若牙齿的运动是沿着合意方向以外的方向,则去除并添加用以使牙齿重新定向的材料。
[0119]
在图5b和5c中所示的一个替代实施例中,是计算矫正器的绝对构形,而并非计算增量差异。如图5b中所示,过程460计算矫正器在当前牙齿区域中的绝对构形。使用上文所述的输入数据,该过程是计算合意末端位置与当前牙齿所实现的末端位置之间的差异(462)。使用牙齿中心线与牙龈组织水平面的交叉点作为参考点,该过程计算所有6个运动自由度上(即,三个平移度及三个转动度)的差异补充量(步骤464)。接下来,如图5b中所示,模型牙齿自其合意末端位置移位达补充差异的量(步骤466)。
[0120]
图5d显示说明性模型矫正器60在说明性模型牙齿62上的平面视图。该牙齿位于其合意末端位置,且矫正器形状由该末端位置中的牙齿定义。图中显示,有限元分析所计算的牙齿实际运动是将牙齿放置于位置64中,而非放置于合意位置62中。对计算末端位置的补充显示为位置66。在该过程的重复期间,过程460(图5b)的下一步骤按照前个步骤(466)中计算的移位模型牙齿(步骤468)的位置来定义当前牙齿区域中的矫正器。图5d中将当前牙齿区域中计算的矫正器构形显示为由位置66中的复位模型牙齿定义的形状68。
[0121]
过程460中亦可构建成规则452(图5a)的另一步骤显示于图5c中。为使当前牙齿沿其中心轴线的方向移动,则要将定义矫正器区域的模型牙齿尺寸、或牙齿矫正器中允许的空间量制作得较小,在该过程决定自其移动牙齿的区域(步骤465)。
[0122]
如图6中所示,为治疗路径中一个步骤计算矫正器形状的过程200(图2b)在过程600中是一个计算一系列矫正器形状的步骤。该过程600始于初始化步骤602,其中获得了初始数据、控制值和约束值。
[0123]
当找出每一步骤或治疗路径中每一区段的矫正器构形(步骤604)时,过程600确定所有矫正器是否为可接受矫正器(步骤606)。若为肯定性结果,则该过程完成。否则,该过程可选地会采取一组步骤610,试图计算一组可接受的矫正器。首先,放松对矫正器的一个或多个约束(步骤612)。然后,对于带有不可接受矫正器的每一路径区段,透过新的约束来实施确定矫正器形状的过程200(图2b)(步骤614)。若所有矫正器都变为可接受,则退出过程600(步骤616)。
[0124]
矫正器可因各种原因而成为不可接受矫正器,其中一些原因由该过程处理。例如,若要求任何不可行的移动(决定步骤620),即,若要求形状计算过程200(图2b)实现某个没有任何可用规则或可用调节的运动,则过程600会进而执行一个模块,该模块会计算受体牙齿的硬体附件构形,由此力可施加至该受体牙齿以实现所要求的运动(步骤640)。由于添加
硬体可具有更为局部的效果,因此当将硬体添加至模型时,再次执行过程600的外部循环(步骤642)。
[0125]
若并未要求任何不可行移动(步骤620的「否定性」支路),则过程将控制转移到路径定义过程(如图2a的步骤150),以重新定义治疗路径中具有不可接受矫正器的彼等部分(步骤630)。该步骤可包括:改变牙齿运动的增量(即,改变治疗路径上的分段)、改变治疗路径中一个或多个牙齿所遵循的路径或该两者。在治疗路径经重新定义之后,再次执行该过程的外部循环(步骤632)。有利地,该重新计算局限于仅重新计算治疗路径的重新定义部分上的矫正器。若所有矫正器皆变为可接受矫正器,则退出该过程(步骤634)。若仍存在不可接受的矫正器,则可重复该过程,直至找到一组可接受矫正器或超过重复的极限(步骤650)。在该点处以及在该等过程中描述于该规范中的其他点处(如在计算附加硬体(步骤640)处),该过程可与操作人员(如临床医师或技术员)交互作用以请求帮助(步骤652)。操作者可提供的帮助可包括:定义或选择附连至牙齿或骨骼的适合附件;定义附加的塑形元件,以为治疗路径的一个或多个区段提供所需的力;建议更改治疗路径,或更改牙齿的运动路径或更改治疗路径的分段;及批准操作约束的某一偏差或放松操作约束。
[0126]
如上所提及,过程600由各输入数据项来定义和参数化(步骤602)。在一个实施方案中,该初始化和定义数据包括如下各项:总体过程的外部循环的重复极限;关于质素因数的规范,质素因数经计算以确定矫正器是否足够好(参见图2b,步骤270);关于矫正器材料的规范;关于矫正器形状或构形必须满足为可接受的约束规范;关于力和定位运动及速度要在正畸术上为可接受的规范;初始治疗路径,其包括每一牙齿的运动路径及将治疗路径分为若干区段的分段方式,其中每一区段由一个矫正器来达成;关于任何安装在牙齿上或其他物体上的锚定件的形状或位置的规范;以及关于牙齿所处的颚骨和其他组织的模型规范(在该所述实施方案中,该模型由牙齿所嵌入的粘性基质流体模型构成,且该粘性基质流体具有实质上定义流体容器的边界条件)。
[0127]
图7是统计根模型的例示性图表。如图中所示,使用上述扫描过程,识别牙齿的扫描上部部分701。然后,给扫描上部(包括牙冠)增补上建模的3d牙根。可以统计方式建立关于牙根的3d模型。牙根702的3d模型及上部700的3d模型一同形成牙齿的完整3d模型。
[0128]
图8显示使用附加牙科信息而得到增强的牙根建模的例示性图表。在图8中,附加的牙科信息是x射线信息。对牙齿的x射线影像710进行扫描,以提供完整牙齿形状的2d视图。在x射线影像中识别目标牙齿的轮廓。根据附加信息,修改图7中形成的模型712。在一实施例中,图7的牙齿模型经形态转换,从而形成与x射线数据相符的新模型714。
[0129]
图9显示牙齿ct扫描的例示性图表。在该实施例中,直接由患者的高解析度cbct扫描导出牙根。然后,可将扫描的牙根应用到由印模导出的牙冠,或可将扫描的牙根与自锥束电脑断层扫描(cbct)数据提取的现有牙冠一同使用。cbct单次扫描会给出3d数据以及多种形式的类x射线数据。避免了pvs印模。
[0130]
在一实施例中,锥束x射线源及2d区域探测器藉由各种方法中的任一种对患者牙科解剖结构进行扫描(优选地,是在360度角范围上及其整个长度上进行扫描),在该各种方法中,区域位置探测器相对于x射线源是固定的,且扫描是由x射线源与物体之间的相对转动和平移移动来提供(辐射源对物体进行照射)。由于锥束源相对于多个沿着扫描路径的源位置(即,「视角」)的移动,探测器会获得对应的多个锥束投影顺序数据集(本文中亦称之为
锥束数据或投影数据),每一锥束数据集代表由物体在其中一个相应源位置处造成的x射线衰减。
[0131]
图10显示例示性使用者介面,该使用者介面显示在另一实施例中可以牙根信息显示的萌生牙齿。可使用适合的手柄对每一牙齿进行单独调节。在图10的实施例中,手柄允许操作者让牙齿在三个维度上以六个自由度进行移动。
[0132]
部分地,使用基于牙根的排序系统对牙齿移动进行导向。在一实施例中,移动是由表面积约束来约束,而在另一实施例中,移动是由体积约束来约束。
[0133]
在一实施例中,该系统确定每一牙齿模型的表面积。然后,该系统对待移动的全部牙齿模型的全部表面积进行求和。接下来,该系统对牙弓上的全部牙齿模型的全部表面积进行求和。对于牙齿移动的每一阶段,该系统会检查在移动牙齿模型时预定的面积比或约束得到满足。在一实施方案中,该约束可为:移动牙齿的表面积要小于支撑移动中的牙齿的牙弓上的牙齿总表面积。若该比例大于特定数值(如50%),则该系统向操作者指示错误信号,以指示应较慢地移动该牙齿。
[0134]
在另一实施例中,该系统确定每一牙齿模型的体积。然后,该系统对移动中的全部牙齿模型的体积进行求和。接下来,该系统确定牙弓上全部牙齿模型的总体积进行求和。对于牙齿移动的每一阶段,该系统会检查当牙齿模型移动时预定体积比或约束得到满足。在一实施方案中,该约束可为:移动牙齿的体积要小于支撑移动中牙齿的牙弓上的全部牙齿的体积。若该比例大于特定数值(如50%),则该系统向操作者指示错误信号,以指示应较慢地移动该牙齿。
[0135]
可选地,可将其他特征添加至牙齿模型数据集以产生矫正器中的合意特征。例如,合意的情形可能是添加数位蜡贴来定义腔室或凹陷,以保持矫正器与牙齿或颚的特定区域之间的空间。合意的情形亦可是添加数位蜡贴来定义皱褶的或其他的结构形式,以建立具有特定硬度或其他结构特性的区域。在依赖于产生正模型以生产复位器具的制造过程中,添加蜡贴至数位模型将制作具有相同添加蜡贴几何形状的正模。这可通用于定义矫正器的基础形状或用于计算特定矫正器的形状。可添加的一个特征是牙龈线周围的镶边,可藉由在数位模型牙齿(矫正器根据该数位模型牙齿进行制造)的牙龈线处添加数位模型钢丝来制作该镶边。当藉由将聚合物材料压力配合于数位牙齿的正物理模型上来制造矫正器时,沿着牙龈线的钢丝使得矫正器在其周围具有镶边,从而沿牙龈线提供额外的硬度。
[0136]
在另一可选制造技术中,将两片或更多片材料压力配合于正牙齿模型上,其中一片材料是沿矫正器的拱顶进行剪裁,且其余的材料覆盖于顶部。这沿牙齿的垂直壁至少提供双倍厚度的矫正器材料。
[0137]
可对矫正器设计作出的改变受到制作矫正器所使用的制造技术的约束。例如,若藉由将聚合物片压力配合于正模型来制作矫正器,则矫正器的厚度由片厚度来确定。因此,一般而言,该系统将藉由改变模型牙齿的取向、模型牙齿若干部分的尺寸、附件位置和选择、以及添加材料或去除材料(例如,添加钢丝或形成陷窝)以改变矫正器结构的方式来调节矫正器的性能。可选地,该系统可藉由指定一个或多个矫正器由非标准厚度材料片制成以对牙齿提供更大或更小的力的方式来调节矫正器。另一方面,若藉由快速成型工艺(例如,立体微影工艺或光微影工艺)来制作矫正器,则矫正器的厚度可局部地变化,且可添加如镶边、陷窝及褶皱等结构特征,而无需修改牙齿的数位模型。
[0138]
该系统亦可用以建立关于更多习用器具(如牙架和矫正器)效果的模型,且因此可用以产生用于特定患者的最佳设计及治疗方案。
[0139]
图11a-11b分别图解带有定位牙具的初始牙齿位置,以及所获得的非合意力向量。参照图示,在其中牙齿显示为沿面方向(沿x方向)移动的实例中,在牙具(如,聚合物壳体矫正器)定位在牙齿上之后,矫正器的几何外形构造为对牙齿施加预定力,以根据特定治疗阶段的治疗计划对牙齿进行复位。例如,如图11b所示,牙具构造为与牙齿啮合以如所示沿x方向复位牙齿,然而如箭头所示和所图解,却导致沿+x/-z方向施加的预定力。
[0140]
因此,在一个方面中,可优化矫正器几何外形以补偿非合意的但已形成的力向量以对该力形成反作用,并进一步沿基考量中的治疗阶段的治疗计划的方向施加既定的力。即,图11c-11d分别图解给牙具添加离隙以对牙齿周围的非合意力向量形成反作用、以及所获得的牙具对牙齿施加的合意预定力。在一方面中,为对非合意力(例如,如图11b箭头所示)进行补偿,可提供预定的离隙(例如,但不限于,0.1至0.3mm)以避免于矫正器与牙齿之间造成非合意力向量的接触,但仍保留(例如)沿上述x轴的合意力。
[0141]
参照图11c,所示箭头是图解矫正器上的预定离隙,由此藉由修改矫正器的几何形状而去除了矫正器与牙齿之间造成非合意力位置处的啮合。以此方式,在一方面中,且如图11d所示,藉由(例如)修改矫正器的几何外形而实现了沿x方向施加于牙齿的既定且合意的力。
[0142]
图12图解修改的牙具几何外形,其中包括用以去除牙具与牙齿之间间隙的附加形状修改。参照图12,请注意,尽管对矫正器几何外形的修改(如上文结合图11c-11d所论述)会导致由牙科治疗所计划的合意预定力施加于牙齿,但例如,如图12中所示,牙齿与矫正器之间、于牙龈区域附近可能会形成间隙或腔。在一方面中,鉴于所产生之间隙或腔,可对矫正器几何外形进一步修改或优化,以(例如)当矫正器处于有效(拉伸)状态时在朝向牙齿的方向上具有更加的适应性。
[0143]
参照图12,在一实施例中,箭头(箭头的方向是可对矫正器形状进行修改的方向)是图解优化矫正器几何外形,以解决所形成之间隙或腔。此外,应注意,针对间隙而进行的矫正器形状优化可能潜在地影响矫正器对牙齿施加力的方向,且因此可能需要进一步进行附加的修改或优化。
[0144]
在一方面中,以一个或多个离隙区域来修改牙科矫正器外形,且分别为较松适应或较紧适应进行轮廓修整以实现合意力向量,而同时避免摩擦和其他非合意力向量,由此为所述牙科条件的治疗提供改进和自订的矫正器形状。
[0145]
在牙具制造中,在一方面中,可在建立过程期间调节快速成型所形成的模子,以呈现基于(例如)在模子的预定义位置或相关位置中数位添加及/或减去离隙及/或突出部分的合意几何形状。
[0146]
图13图解基于牙齿治疗计划的扫描几何形状来构造牙具几何外形。参照图13,在一方面中,由于牙科矫正器与牙齿之间的摩擦可对治疗形成限制,因而在一方面中,可藉由去除当前位置(当前治疗阶段)与下一位置(n+1治疗阶段)之间的所有干扰来优化矫正器的几何形状。即,可产生当前位置与下一位置之间的扫描几何形状。图13中所示的扫描几何形状是当前位置与朝向下一位置(n+1治疗阶段)的下一无限小增量之间的联合几何形状。藉由累加该等无限小增量,所获得的几何形状便确立了扫描几何外形。
[0147]
再次参照图13,在确定矫正器扫描几何形状以最小化或去除牙齿与牙科矫正器之间的摩擦之后,可给矫正器形状添加一个或多个变形或离隙,以提供合意的移动向量,以沿针对治疗计划的特定治疗阶段所确定的方向施加既定的力。
[0148]
在另一方面中,可探测何时因所产生的力不充分而无法导致牙齿的移动。即,垂直于合意移动线(或垂直于移动向量的方向)的表面积量可能不足以让矫正器达成必需的力。例如,在突出方向上(如图12中所示,沿+z轴),所存在的根切力可能不足以能沿该方向推动牙齿。因此,可在牙齿上添加或提供牙科附件,以改善垂直于牙齿移动的合意方向的表面积量。
[0149]
在一方面中,基于由材料性质以及垂直于复合向量(其由特定治疗阶段的移动向量造成)的表面积量所确定的力行为,可藉由采用特别适合于合意移动的牙科附件,给牙齿增加额外的表面积。以此方式,在一方面中,可确定某一特定牙齿的表面积的剖面,且牙科附件可定位在牙齿上,以增大或改善必要的表面积以与牙具相协作或啮合,以实现沿治疗阶段的准确方向的作用于牙齿的合意移动向量或预定水平的力。
[0150]
以此方式,在一方面中,可使用电脑辅助设计工具或系统来制造或仿真牙科矫正器,其中首先建立关于待移动牙齿图像的模型。此后,藉由所定义的几何外形性质来建立关于定义牙齿目标位置的矫正器。此后,例如,使用fea建模或其他适合的计算及/或建模技术来确定或建立关于使牙齿自初始位置复位至目标位置所必需的力的模型。在一方面中,可使用连接至力量测感测器的牙齿的物理模型来定义该力,以便可使用自物理模型获得的读数来确定最佳力,因此,至少部分地基于来自物理力仪表的反馈来更改附件和矫正器构形的形状。
[0151]
因此,确立所施加力方向的移动向量、以及对于自初始位置复位至目标位置必要的力水平和其性质得到定义。基于移动向量及建模的矫正器形状,对矫正器进一步修改或重新构形以将所确定的移动向量纳入考量。即,在定义移动向量(该向量识别对于牙齿复位必要的力性质)之后,基于所确定的移动向量来更改或优化牙具形状。另外,可进一步优化器具形状以对基于定义的移动向量而可能导致的非合意力或分力进行反作用。
[0152]
此后,可经由快速成型或其他适合的技术来制造经修改的或优化的牙具,以达成合意的牙齿移动。此外,可重复该过程以针对治疗计划的每一治疗阶段优化牙具,以使矫正器性能以及治疗计划结果得到改善。
[0153]
另外,在一方面中,提供交互作用的分析过程,其中将轻微或微小局部改变引入矫正器几何外形中,且其中所获得力分布的效果在(例如)治疗计划的每一治疗阶段中与合意力相比较,且若该结果接近目标分布则重复该过程,且若结果离开或偏离目标分布则忽略该过程。针对治疗计划的每一治疗阶段重复该过程,以使该系列牙具或矫正器的相应几何外形各自得到优化,以改善治疗结果。
[0154]
在另一方面中,在一实施例中,牙具构形可基于上文论述的扫描几何形状,以最小化牙具与相应牙齿之间的摩擦,此外,可修改牙具以建立一个或多个个别的接触点或表面(例如,使用接合至牙齿的附件的陷窝或接触),以产生合意的力。可使用(例如)电脑辅助设计或建模工具来建立关于所获得的牙具几何形状(包括当前和后续(n+1阶段)的扫描路径几何形状)以及力产生移动(如上文所述的移动向量)的模型。
[0155]
此外,在再一方面中,可基于垂直于牙齿移动的合意方向的最大量可用表面积的
位置来确定牙科附件的布局。此外,若在治疗计划中作用于任何给定牙齿的力处于或低于预定义水平,则可将附件添加至牙齿以增补合意的表面积或增大牙齿的摩擦系数,由此改善矫正器在牙齿上的力分布。
[0156]
在一方面中,可经由(例如)加法、局部或总体减法、均匀或非均匀比例缩放、布林或非布林演算法或几何作业或其一个或多个组合有意地更改与牙齿、牙龈及/或其他口腔组织或结构相关联的数据集,以便可针对合意或既定的治疗目标优化牙具的构形、建模及/或制造。
[0157]
此外,参照上文关于附件的论述,可提供附件的成角或附连以及表面构形,以改善移动向量,以优化移动向量对于合意牙齿的施加,而同时最小化可反作用于移动向量的非合意或有害力向量的量。另外,在一方面中,可提供一系列毗连附件以更改力方向或产生输送达某一预定时期的移动向量,以使该系列毗连附件可构造为起到慢动作凸轮的功能,而牙具则起到从动轮的功能。
[0158]
在再一方面中,可添加点追踪以处理及/或追寻治疗阶段的牙齿点,以便可确定合意或适当的凸轮/从动轮关系,以达成目标位置或治疗目标。在一方面中,牙具内表面上的一个或多个突出部分可构造为从动轮,且可由虚拟压力点形成。有意地建立或设计在参考模子或模型中的空隙的一个实施例中包括虚拟压力点,当矫正器形成于参考模子上时,参考模子或模型与矫正器中既定于对牙齿施加额外压力的对应部分相关联。
[0159]
图14a-14b图解用于使牙齿转动的牙科附件定位。参照图14a-14b,如图所示,一对附件定位于牙齿的颊面表面和舌面表面上,其中心相对于牙齿定位在垂直于z轴的平面中。参照该等图示,该两个附件以图示中的相应箭头所示的相反方向在上述的平面中移位或偏置,以产生对应于净力为0的转矩的力偶,从而造成牙齿的转动移动。
[0160]
图15图解用于使牙齿倾斜的牙科附件定位。参照图15,可将一个附件定位于颊面表面上,而将另一附件定位于舌面表面上,该等附件的相对高度存在差异,且其中心或轴相对于牙齿定位于垂直于y轴的平面内。力沿箭头所示的方向施加于附件,从而造成相对于牙齿位置沿y轴的转矩,且所获得的净力为0。在另一方面中,附件可定位相对于牙齿垂直于y轴的平面中。以此方式,施加于附件以使一个附件朝牙合面平移的力以及同一平面内沿相反方向的另一力会导致牙齿的倾斜。该方法可使用于(例如)正畸术的牙根扭转(舌面牙根倾斜)中,而牙齿的转动中心位于牙冠中,因此牙根将会发生倾倒或倾斜。
[0161]
图16图解用于使牙齿成角的牙科附件定位。如所示,该对附件定位于牙齿上,而相应的力如相应箭头所示施加于牙齿上。该效果会造成牙齿的成角(例如,沿图16中所示实施例中的顺时针方向)。
[0162]
图17a-17b图解分别用于颊面平移和舌面平移的牙科附件定位。参照该等图示,如图所示的该对附件可在相对于牙齿的x-y平面中定位于颊侧和舌侧上。由于两个附件定位在相对于牙齿转动中心的不同高度处,因此靠近转动中心定位的附件被推入牙冠的程度大于相对于远离转动中心的附件。因此,作用于牙齿的总力将是正值,但可将倾倒转矩调为0,因为可将来自两个附件中每一附件的作用于转动中心的力杠杆分量调节为相等、方向相反。该方法可实现牙根平移。
[0163]
图18a-18b分别图解用于近中平移和远中平移的牙科附件定位。参照该等图示,藉由如图所示地定位该对附件并对其施加适合的预定力,可获得牙齿的近中平移和远中平
移。
[0164]
图19a-19b分别图解用于突出和下压的牙科附件定位。参照该等图示,该情形下的该对附件与包含z轴的平面中心一同定位于牙齿的舌侧和颊侧。图中所示的两个附件构造为沿z轴向上移动以实现突出,或沿z轴向下移动以实现下压。产生于该两个附件或施加于该两个附件的力在量值上不同(例如,此乃因相对于牙冠的不同局部附件移动而造成)。当来自附件的力对转动中心造成大小相等、反向相反的力臂时,倾倒转矩可被抵消,且所获得的力可包括牙齿的突出或下压平移。
[0165]
此外,导致上述突出或下压的附件移动可与作用于牙冠上的平移移动一同使用以获得反向平衡转矩。例如,藉由将附件构造为相对于牙冠使其朝向颊面表面上的咬合平面移动,可反向地平衡由颊面移动造成的倾倒转矩。
[0166]
另外,造成突出或下压平移的附件移动可与局部膨胀的矫正器一同使用,局部膨胀的矫正器包括于一些牙冠上鼓起的矫正器表面,以使矫正器表面不与处于被动状态的牙冠相接触。当膨胀矫正器与附件移动一同使用于转动时,可获得最大的转动转矩和最小的有害力,此乃因矫正器仅对附件进行干扰,以产生(例如)总力为0的转动力偶。
[0167]
在再一实施例中,可使用预先制作的附件来减少或消除因不适当附件成形而引起的失效。
[0168]
因此,在一方面中,首先确定n+1或后续/目标牙齿位置。此后,确定自初始牙齿位置到达目标牙齿位置的移动方向。在确定移动方向之后,确定用以使牙齿自初始位置复位至目标位置的力以及转矩的量或量值及方向。此后,确定沿所计划的牙齿移动的方向提供最适合固持的附件的轮廓(如,几何形状),并且确定附件相对于牙齿表面的最佳位置。
[0169]
确定附件相关轮廓之后,确定达成自初始位置至目标位置的附件移位。在将附件定位于牙齿上之后,后续治疗阶段的牙具经由定位的附件与牙具相啮合并接触。
[0170]
以此方式,牙具所产生的力/转矩沿合意的方向准确定向,且亦配置为具有足以使牙齿移动进入下一计划位置的量值。例如,在一实施例中,将附件接合至患者牙齿。如上文所述,确定附件的初始位置。移位或复位的附件可产生与牙具上的附件形状相一致的腔室新位置。由于附件在初始阶段位于牙冠上且在后续目标治疗阶段发生移位,因此目标治疗阶段的牙具可干扰初始治疗阶段牙齿上的附件。该干扰本身亦配置为产生形成合意牙齿路径的力/转矩。
[0171]
在一方面中,可修改或优化力/转矩的方向和量值,以产生反向平衡力/转矩,以藉由调节(例如)相对于牙冠表面的附件移位量来消除或最小化有害倾倒转矩,以达成牙根移动或类似的移动。相对于牙冠的附件移动量亦可与牙齿移动相关联,以基于附件的移动产生治疗计划。
[0172]
图20图解牙具及附件的互补啮合。参照图20,在一方面中,牙具(如图20中标记为(a)的牙具)上提供有突出部分或按钮,在一实施例中,该突出部分或按钮构造为与附件(图20中标记为(b)的附件)上的对应凹槽或陷窝相啮合,且定位于牙齿表面上。以此方式,藉由牙具上的按钮或突出部分以及附件上用以接纳突出部分的腔室,可构造突出部分的相对位置以对附件器件施加点力或面区域力。
[0173]
因此,可对牙具或矫正器上的突出部分以及接纳附件器件上的腔室进行构造,以形成可在该处施加点力的结合或啮合。此外,在(例如,基于上述的一个或多个移动平移)对
牙具上突出部分的相对位置以及附件上的腔室进行局部修改的情形下,可将点力或面区域力定向成导致对应的牙齿移动。
[0174]
此外,在本发明一个方面中,构造成提供面向牙齿的更改点力的表面区域可包括朝向牙齿内部的脊状部分突出部分或扁平突出部分。另外,该力在n+1阶段亦可包括「加强」表面区域,其中在一方面中,可藉由一个或多个脊状部分或折痕来构建皱褶,以使面向牙齿的内表面与牙齿保持全接触(而非点接触或脊状部分的接触)且使得该内表面在局部支撑区域中得到加强,以使力不如在未得到支撑的区域中一样容易分散。
[0175]
图21是图解优化牙具几何外形的流程图。参照图21,在步骤2110处,确定牙齿的初始位置。此后,在步骤2120处,确定基于治疗计划的牙齿目标位置。在一方面中,该目标位置可包括下一或n+1治疗阶段的牙齿位置。再次参照图21,在基于治疗计划确定牙齿目标位置之后,在步骤2130处,计算或确定与自初始位置至目标位置的牙齿移动相关联的移动向量。即,确定力分布或属性,例如,包括(例如)与自初始位置至目标位置的牙齿移动相关联的力量值及力方向。
[0176]
再次参照图21,在确定与自初始位置至目标位置的牙齿移动相关联的移动向量之后,在步骤2140处,确定与移动向量相关联的分量。例如,如上所述,确定与使牙齿自初始位置复位至目标位置的移动向量相关联的力量值。另外,确定牙齿移动的力方向以及解决有害或非既定力的反向力。此后,基于与移动向量(其与自初始位置至目标位置的牙齿移动相关联)相关联的确定分量,对牙具的腔室几何形状进行修改。
[0177]
图22是图解牙科附件定位的流程图。参照图22,在步骤2210处,确定第一治疗阶段处的牙齿位置。在步骤2220处,确定第二治疗阶段或n+1治疗阶段的牙齿位置。此后,在步骤2230处,确定与自第一治疗阶段至第二治疗阶段的牙齿移动相关联的移动向量。在确定与牙齿移动相关联的移动向量之后,在步骤2240处,确定与移动向量相关联的一个或多个牙科附件轮廓。即,确定(例如)牙科附件的位置、牙科附件的成角、垂直于来自牙具力方向的表面积。此后,在步骤2250处,在第一治疗阶段期间,将一个或多个牙科附件定位在对应的牙齿上。
[0178]
以此方式,在一实施例中,来自牙具的力/转矩准确地施加至牙齿,以使牙齿自初始位置复位至目标位置或第二治疗阶段位置。
[0179]
参照图23,在步骤2310处,对于步骤序列中使牙齿自初始位置移动至目标最终位置的阶段,计算每一牙齿表面上每一点的轨迹以实现给定的预定阶段移动。根据轨迹,确定牙齿的有效表面2320。有效表面是计算为满足如下条件的牙齿表面上所有的点p:牙齿表面的法相力n(p)在点p处到对应于合意移动轨迹γp的切向向量上的投影大于预定义正阈值。一旦有效表面经确定,针对患者的每一牙齿计算有效表面与牙根阻力表面之间的比例2330。若该比例大于预定阈值,则牙齿具有所需牙齿移动的充分有效牙齿表面2340。
[0180]
仍参照图23,若有效表面与牙根阻力表面之间的比例不大于预定义阈值,则可对现有牙齿表面进行最小改动2350。除其他以外,对现有牙齿表面的改动可包括自订的附件或器具,用以增大牙齿有效表面数量或将材料添加至牙齿表面。对现有牙齿表面的最小改动应满足如下约束:经修改的表面为所需移动提供有效表面,而该比例大于有效表面与阻力表面之间的阈值;经修改的表面是对当前位置的牙齿可触及表面的改动;以及经修改的表面必须满足制造要求。一旦现有牙齿表面经修改,则重复针对修改后牙齿表面的步骤
2310-2330,由此透过对应的矫正器对新表面进行核查,以确保与修改后的牙齿表面存在足够的接触面积。
[0181]
图24是图解确定附件对于获得充分牙齿有效表面积是否合意的方法的流程图。参照图24,在步骤2410处,针对治疗计划的阶段序列中使牙齿自初始位置移动至目标位置的给定治疗阶段,可确定牙齿的刚体变换a。在一方面中,刚体变换a可包括使牙齿自阶段n的位置移动至阶段n+1的位置的刚体变换。
[0182]
参照图24,根据刚体变换a,确定刚体变换空间内的测地曲线a(t),该刚体变换与对应于0移动i的刚体变换以及刚体变换a的刚体变换有关(2420)。例如,在一方面中,对应于0移动i的刚体变换与保持相同、没发生任何移动或移位的所有点相关。对于牙齿表面上的每一顶点v,计算曲线a(t)v在t=0处的单元切向向量与牙齿表面在v处的内法向单元向量n的点积s(v)2430。
[0183]
此后,确定牙齿的有效表面,牙齿的有效表面是具有至少一个顶点v且其中s(v)大于预定义sc的所有牙冠表面的集合(2440)。即,在一方面中,当牙冠点移动的方向与该点处表面内法向之间的角度大于预定义临限sc时,便可将该牙冠点视为有效牙冠表面。再次参照图24,确定牙齿的阻力表面,牙齿的阻力表面是具有至少一个顶点v且其中s(v)小于预定义sr的所有牙根表面的集合(2450)。在另一方面中,若牙根点移动的方向与该点处的表面内法向之间的角度大于预定义sr,则可将该牙根点视为位于阻力牙根表面上。
[0184]
再次参照图24,可将比例g确定为有效表面与阻力表面的面积比例(2460)。若比例g大于预定义有效-阻力阈值ar,则可无需任何附件(2470)。例如,在一方面中,若牙冠有效表面积与牙根阻力表面积的比例大于预定义有效-阻力阈值ar,则可将该移动视为可行。另一方面,若比例g不大于ar,则使用对牙冠表面的最小度添加,以使重新计算的比例g满足g》ar的条件(2480)。可将该添加制作成附件(除其他以外,如脊状部分、突出部分或陷窝),且可使该附件与牙冠啮合。
[0185]
根据一实施例,使用非重复性过程以根据治疗计划为合意的移动确定矫正器的近最佳形状。图25是非重复性过程800的流程图。针对基本的形状特征(例如,陷窝),在步骤810处,计算该特征所形成力的量值,该量值是该特征于矫正器表面上的位置以及特征凸起程度的函数。可藉由将特征位置的几何特性(例如,至边界的距离、至曲折脊状部分的距离、曲率等)与该特征所产生力的量值相联系,以统计的方式导出该函数。针对自阶段n至阶段n+1的给定牙齿移动,在步骤820处,计算对应于给定移动的经由阻力中心的旋转轴及平移向量。接下来,在步骤830处,识别牙齿表面上将对其施加力的点,且计算该等力的量值,以使若该等量值的力沿其自阶段n至阶段n+1的移动轨迹的方向施加于识别点,则下列条件已得到满足:
[0186]
a.经由阻力中心的总转矩轴要靠近所要求的转动轴方向
[0187]
b.总转矩量值要足以使牙齿转动
[0188]
c.总力方向要靠近平移向量的方向
[0189]
d.总力量值要足以使牙齿平移。
[0190]
然后,于步骤840处,在满足上述条件的点集合当中识别满足下列约束的点集合:
[0191]
a.点数量尽可能少
[0192]
b.各点尽可能地分开
[0193]
c.各点要尽可能靠近牙齿的有效表面。
[0194]
针对步骤840中识别的点集合,在步骤850处,计算将点位置转变为有效表面所需的附件表面(如有),以实现所需的牙齿移动。然后,在步骤860处,选择带有不超过一个附件的点集合,该附件位于牙齿的颊侧,其中步骤830的条件尽可能地得到满足。然后,在步骤870处,在所识别的点集合处形成其凸起程度对应于合意力量值的形状特征(例如,陷窝)。在可选步骤880处,若各点的位置彼此靠近,则可将对应的陷窝合并以形成脊状部分。熟悉此项技术者应理解,所获得的陷窝和脊状部分是牙齿的合意移动所需的矫正器形状特征。
[0195]
图26在一方面中显示牙冠点自治疗计划的第一治疗阶段至第二治疗阶段的轨迹。参照图26,牙冠2501在治疗计划中的一个治疗阶段的初始位置中具有点2511和2521。在治疗计划的合意治疗阶段处,牙齿2501的牙冠的等效点可移位至目标位置2512和2522。可基于牙冠的初始位置及目标位置确定和映射轨迹2513和2523。
[0196]
图27在一方面中显示牙齿的有效表面和阻力表面。参照图27,牙冠2501具有有效表面2530,或具有可对其施加力以使牙齿沿合意轨迹2513和2523移动的表面。抵触此等有效表面可包含力施加于牙根2502上的阻力表面2540。当有效表面与阻力表面的比例大于预定义阈值时,如成形的矫正器可施加适当的力以使牙齿沿合意轨迹2513和2523移动。
[0197]
图28演示藉由添加附件来增大牙齿的有效表面。参照图28,在有效表面与阻力表面的比起初并不大于预定义阈值的情形下,可使添加物(如包括脊状部分、陷窝或突出部分在内的附件2550)与牙齿相啮合来增大牙齿的有效表面2530。使用附件来增大有效表面2530的量,由此有效表面与阻力表面之间的比例可大于预定义阈值,因而允许施加力以实现牙齿沿合意轨迹2513的正确移动。
[0198]
图29显示带有附件的牙齿以及带有匹配于附件的脊状部分的矫正器的剖面。参照图29,为实现合意的牙齿移动,有时可使用附件2550来增大牙冠表面2501的有效表面积。为使附件有效,必须对附件2550施加正确的力以使牙齿沿合意的轨迹路径移动。脊状部分2561或任何等效物在配合于附件2550的成形矫正器2560中形成该等力。以此方式,矫正器2560对牙齿表面以及附件2550直接施加正确的力,以使牙齿沿合意轨迹自初始位置移动至合意目标位置。
[0199]
以该所述的方式,在一方面中,可至少部分地基于患者初始位置的初始牙系以及合意的治疗结果(包括例如治疗结束时牙齿的位置和取向)产生正技术治疗计划。在一方面中,可使用电脑软件构建的方法来分析每一牙齿自其初始位置至最终位置的路径。可分析三维空间内的所有移动。例如,可将路径描述为一系列增量的移动,其中每一增量可包括线性移位和转动的组合。可至少部分地基于(例如)可在通往最终目标位置的路径上引发下一移动增量,或可引发囊括自初始位置至最终目标位置的总体移动的一个移动的负载,确定达成合意移动所需的负载—力和力矩。
[0200]
在一方面中,可分析牙齿的表面并将其定义为若干离散较小表面的汇集。可识别其取向合意于所需方向或负载的表面。若该种表面不存在,或其对于所需的负载施加并非最佳,或无法经由口腔内部接近该表面,则可藉由添加材料来改善或更改牙齿表面的轮廓/取向。以此方式,在一方面中,本文所述的方法可确定一种或多种可能的解决方案来提供对合意力系的纠正,且可确定一种或多种临床上可行的解决方案。
[0201]
在另一方面中,可能需要作用于一个以上表面的一个以上的力,以给规定的移动
赋予正确的力系。应理解,牙具构造为对牙齿施加一个力系,且力系包括力、力矩以及力偶矩中的至少一个。因此,可对矫正器几何形状作出改动,使得可将所指派的力系递送于由(例如)一个或多个确定的可行解决方案所识别的表面上。矫正器几何形状参数的改动可导致矫正器与牙齿接触点的改动,且可控制施加至特定牙齿的力系。可对该等改动进行校准以控制力系并开始牙齿的移动。此外,亦可包括具体的特征(如但不限于脊状部分)来达成对表面上接触点的控制并提供必要的负载。
[0202]
在再一方面中,矫正器几何形状可提供有离隙区域或空隙,以允许牙齿不受阻碍地移动进入该区域或位置。由矫正器施加于牙齿的力系可使牙齿在矫正器所囊括的开放空间内顺利地移动。
[0203]
在再一方面中,矫正器特征可设计并制作成限制牙齿的移动。例如,可将矫正器设计为使牙齿无法移动越过的物理边界,从而提供安全性,防止危害患者健康的有害移动。此外,在另一方面中,矫正器可构造为起到牙齿移动的导向表面的功能。更具体而言,矫正器可构造为对牙齿施加力系,且可在矫正器导向作用的辅助下使牙齿导向进入具体的位置和取向。
[0204]
以此方式,将一个或多个特征并入矫正器几何形状或构形可导致矫正器几何形状之后续改变,该等改动导致牙齿和矫正器接触表面位置的改变。可藉由识别新表面和负载来确定并补偿该等改变以及该等几何形状改变的效果,以达成合意的移动。可在该重复设计过程中改善矫正器几何形状,此乃因可对每一次重复进行配置以考量每一特征及其对矫正器几何形状、接触表面以及所产生的力系的效果,之后再定义最终的矫正器设计并亦定义包括各治疗阶段的总治疗计划。
[0205]
以所述方式,在一方面中,正畸治疗方法可包括:定义每一牙齿的移动路径;达成该移动所需的力系;确定拟施加于该等表面以赋予所定义力系的表面以及力;以及满足该治疗标准的矫正器几何形状设计。
[0206]
一实施例中的由电脑构建的方法包括:确立牙齿的初始位置;确定牙齿在治疗计划中的目标位置;计算与自初始位置至目标位置的牙齿移动相关联的移动向量;确定对应于移动向量的多个分量;以及确定一个或多个相应附连器件相对于牙齿表平面的一个或多个对应位置,以使该一个或多个附连器件与牙具相啮合。
[0207]
该一个或多个附连器件可构造为大致在牙齿表平面处对牙具施加预定的力。
[0208]
在一方面中,多个分量可提供如下的一个或多个:牙齿的转动移位、牙齿的角移位、牙齿的线性移位或其一个或多个组合。
[0209]
牙具可包括聚合物壳体。
[0210]
此外,该多个分量中的一个或多个可对应于由牙具施加于相应附连器件的一个或多个相应的力或力矩,其中该多个分量中的一个或多个可对应于由相应附连器件施加于牙具的一个或多个相应的力或力矩。
[0211]
该一个或多个附连器件可包括提供于牙齿上相对于彼此处于毗连位置的多个牙科附连器件,其中牙具可构造为依序地并单独地物理接触多个毗连牙科附连器件中的每一个达某一预定的时期。
[0212]
在另一实施例中,一种用于建立关于牙具的模型的装置包括:数据存储单元以及处理单元,该处理单元联接至数据存储单元并配置为:确定牙齿的初始位置;确定牙齿在治
疗计划中的目标位置;计算与自初始位置至目标位置的牙齿移动相关联的移动向量;确定对应于移动向量的多个分量;以及确定一个或多个相应附连器件相对于牙齿表平面的一个或多个对应位置,以使该一个或多个附连器件与牙具相啮合。
[0213]
在一方面中,该一个或多个附连器件可构造为大致在牙齿表平面处对牙具施加预定的力。
[0214]
在一方面中,多个分量可提供如下的一个或多个:牙齿的转动移位、牙齿的角移位、牙齿的线性移位或其一个或多个组合。
[0215]
此外,牙具亦可包括聚合物壳体。
[0216]
该多个分量中的一个或多个可包括由牙具施加于相应附连器件的一个或多个相应的力或力矩,其中该多个分量中的一个或多个可对应于由相应附连器件施加于牙具的一个或多个相应的力或力矩。
[0217]
在一方面中,该一个或多个附连器件可包括提供于牙齿上、彼此处于毗连位置的多个牙科附连器件,其中牙具可构造为依序地并单独地物理接触多个毗连牙科附连器件中的每一个达某一预定的时期。
[0218]
根据另一实施例,一种由电脑构建的方法包括:确立牙齿的初始位置;确定牙齿在治疗计划中的目标位置;计算与自初始位置至目标位置的牙齿移动相关联的移动向量;确定对应于移动向量的多个分量;以及基于该多个分量,修改用于牙齿的牙具的腔室几何形状。
[0219]
可基于fea建模来确定移动向量。该移动向量亦可基于物理力建模。
[0220]
此外,该多个分量中的一个或多个可包括与自初始位置至目标位置的牙齿移动相关联的一个或多个力向量,其中可将该一个或多个力向量设计到牙具的腔室几何形状中,以对牙齿施加与该一个或多个相应的力向量相关联的一个或多个对应的力。
[0221]
该方法亦可包括:更新牙齿的聚合物壳体的腔室形状,以对牙齿施加对应于移动向量的多个经确定的分量,以使牙齿自初始位置复位至目标位置。
[0222]
另外,该方法亦可包括:确定与移动向量相关联的力水平,其中确定力水平可包括:于牙齿表面上确定一个或多个施加移动向量的位置;及构造用于牙齿的聚合物壳体的腔室几何形状,以在牙齿表面上的一个或多个确定位置处施加移动向量。
[0223]
根据再一实施例,一种制造牙具的方法包括:为治疗计划的每一阶段,确定符合患者正畸术条件的治疗计划;定义牙齿的初始位置;确定牙齿的目标位置;计算与自初始位置至目标位置的牙齿移动相关联的移动向量;确定对应于移动向量的多个分量;以及基于该多个分量,修改用于牙齿的牙具的腔室几何形状。
[0224]
该方法在一方面中可包括产生关于修改的腔室几何形状的虚拟图像。
[0225]
根据再一实施例,一种由电脑构建的方法可包括:确立牙齿的初始位置;确定牙齿在治疗计划中的目标位置;确定确定初始位置与目标位置之间的扫描几何路径以及用于使牙齿自初始位置复位至目标位置的相关移动向量;以及基于所确定的扫描几何路径,修改用于牙齿的聚合物壳体的腔室几何形状,其中修改腔室几何形状可包括在用于牙齿的聚合物壳体内表面上定义一个或多个接触牙齿一个或多个对应预定表面的接触点。
[0226]
此外,在再一方面中,修改腔室几何形状可包括:在用于牙齿的聚合物壳体内表面上定义一个或多个突出部分,其中该一个或多个突出部分与移动向量相关联。
[0227]
该一个或多个突出部分可包括陷窝。
[0228]
此外,可修改腔室几何形状以最小化聚合物壳体内表面与牙齿之间的摩擦。
[0229]
根据再一实施例中,一种由电脑构建的方法可包括:确立牙齿的初始位置;确定牙齿在治疗计划中的目标位置;计算与自初始位置至目标位置的牙齿移动相关联的移动向量;确定对应于移动向量的多个分量;以及基于对应于移动向量的多个确定分量中的每一分量的相应表面积确定,确定一个或多个对应牙科附连器件的一个或多个布局位置。
[0230]
在一方面中,与治疗计划相关联的聚合物壳体内表面可构造为施加对应于多个分量中一个相应分量的一个或多个相应的力。
[0231]
该方法在一方面中可包括:确定大致垂直于与自初始位置至目标位置的牙齿移动相关联的移动向量方向的表面积。
[0232]
本发明的数据处理方面可构建在数位电子电路或电脑硬件、固件、软件或其组合中。本发明的数据处理装置可构建在电脑程序产品中,该电脑程序产品以有形方式实施于机器可读存储器件中以由可程序化处理器执行;且本发明的数据处理方法步骤可由可程序化处理器来实施,该可程序化处理器执行指令程序以藉由对输入数据进行操作并产生输出的方式来实施本发明的功能。有利地,本发明的数据处理方面可构建在一个或多个电脑程序中,可在可程序化系统上执行该一个或多个电脑程序,该可程序化系统包括:至少一个可程序化处理器,其经联接以自数据存储系统接收数据和指令并将数据和指令传输至数据存储系统;至少一个输入器件;以及至少一个输出器件。可采用高级程序型程序语言或物件导向程序语言,或可采用汇编语言或机器语言(若合意的话)来构建每一电脑程序。且在任何情形下,该语言皆可为编译式语言或直译式语言。适合的处理器包括(以举例的方式)通用微处理器和专用微处理器两种。一般而言,处理器将自只读记忆体及/或随机存取记忆体接收指令和数据。适于以有形方式实施电脑程序指令和数据的存储器件包括所有形式的非挥发记忆体,包括(以举例的方式)半导体记忆体器件,如eprom、eeprom及闪存记忆器件;以及磁碟,如内置硬碟及可移除式碟;磁光碟;以及cd-rom碟。上述任何器件可由asic(应用专用积体电路)进行补充或并入asic中。
[0233]
为提供与使用者的交互作用,可使用电脑系统来构建本发明,该电脑系统具有用于向使用者显示信息的显示器件(如监视器或lcd(液晶显示)屏)以及让使用者可对电脑系统进行输入的输入器件(如键盘、二维指针器件(如滑鼠或轨迹球)或三维指针器件(如数据手套或回转型滑鼠))。可程序化该电脑系统以提供让电脑程序与使用者交互作用的图形使用者介面。可程序化该电脑系统以提供虚拟现实、三维显示界面。
[0234]
对于熟悉此项技术者而言,本发明结构及操作方法方面的各种其他修改型式以及改动将一目了然,而此并不违背本发明的范围和主旨。尽管上文结合具体优选实施例描述了本发明,但应了解,所主张的发明不应当仅局限于此等具体实施例。本发明的范围意欲由如下权利要求书来限定,且该等请求项以及其等效形式范围内的结构和方法亦意欲由权利要求书涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1