手术机器人系统的电力管理体系结构的制作方法
手术机器人系统的电力管理体系结构
背景技术:
1.手术机器人系统当前正用于微创医疗程序。一些手术机器人系统包含:手术控制台,该手术控制台对手术机器人臂进行控制;和手术器械,该手术器械具有耦接到机器人臂并由机器人臂致动的末端执行器(例如,钳或抓握器械)。此类机器人系统由具有多个供电轨和备份单元的复杂电力供应装置系统供电。因此,需要用于手术机器人系统的流线型电力管理以用于控制复杂电力供应装置设备。
技术实现要素:
2.本公开提供了一种手术机器人系统,该手术机器人系统包括多个部件,即:控制塔、控制台和一个或更多个手术机器人臂,每个部件设置在可移动的推车上并且包括手术器械。控制塔包括电力供应装置系统,该电力供应装置系统将电力分配给每个可移动推车和附接到可移动推车上的机械臂。电力供应装置系统包括多个电力供应装置,每个电力供应装置为单独的可移动推车供电。电力供应装置系统包括控制器,该控制器被配置成基于可移动推车的连接状态和单独电力供应装置的状态来控制该单独电力供应装置。
3.根据本公开的一个实施方式,公开了一种手术机器人系统。该手术机器人系统包括至少一个可移动推车,该至少一个可移动推车包括具有手术器械的机器人臂。手术机器人系统还包括控制塔,该控制塔包括通过线缆耦接到至少一个可移动推车的电力供应装置系统。电力供应装置系统包括:电力供应装置,该电力供应装置被配置成输出为至少一个可移动推车供电的电压信号和至少一个状态信号;线缆状态检测电路,该线缆状态检测电路被配置成对指示线缆的连接状态的连接信号进行检测;以及控制器,该控制器耦接到线缆状态检测电路及电力供应装置,该控制器被配置成基于线缆的连接状态及至少一个状态信号来控制电力供应装置。
4.根据上述实施方式的一个方面,电力供应装置包括电力供应装置连接器和通信连接器,电力供应装置连接器和通信连接器中的每一者均耦接到控制器。电力供应装置系统还包括:耦接到电力供应装置连接器的电力供应装置隔离器;和耦接到通信连接器的通信隔离器。
5.根据上述实施方式的另一方面,电力供应装置系统还包括隔离阻障部,该隔离阻障部将电力供应装置与控制器电流隔离。
6.根据本公开的另一实施方式,公开了一种手术机器人系统。手术机器人系统包括多个可移动推车,每个可移动推车包括具有手术器械的机械臂;以及手术机器人系统包括控制塔,该控制塔包括电力供应装置系统,该电力供应装置系统包括:多个电力供应装置,每个电力供应装置通过线缆耦接到多个可移动推车中的一个可移动推车,并且每个电力供应装置被配置成输出为一个可移动推车供电的电压信号和至少一个状态信号;多个线缆状态检测电路,每个线缆状态检测电路被配置成对指示线缆的连接状态的连接信号进行检测;多个控制器,所述控制器耦接到多个线缆状态检测电路中的一个线缆状态检测电路和所述多个电力供应装置中的一个电力供应装置,所述控制器被配置成基于线缆的连接状态
和至少一个状态信号来控制一个电力供应装置;以及多个隔离阻障部,该多个隔离阻障部将每个电力供应装置彼此电流隔离并且将每个电力供应装置与每个控制器电流隔离。
7.根据上述实施方式的一个方面,每个电力供应装置包括电力供应装置连接器和通信连接器,电力供应装置连接器和通信连接器中的每一者均耦接到对应的控制器。隔离阻障部中的每个隔离阻障部包括:耦接到电力供应装置连接器的电力供应装置隔离器;和耦接到通信连接器的通信隔离器。
8.根据上述实施方式中的任一实施方式的一个方面,线缆状态检测电路包含去抖动器。
9.根据上述实施方式中的任一实施方式的另一方面,控制器还被配置成:响应于连接信号的终止,来终止电力供应装置的电压信号。控制器还被配置成:响应于至少一个状态信号在预定参数之外,来终止电力供应装置的电压信号。
10.根据本公开的又一实施方式,公开了一种用于对手术机器人系统进行控制的方法。该方法包括:从电力供应装置输出电压信号,以为可移动推车供电,该可移动推车包括具有手术器械的机械臂;以及发送指示将可移动推车连接到电力供应装置的线缆的连接状态的连接信号。该方法还包括:从电力供应装置发送至少一个状态信号;以及在控制器处基于线缆的连接状态和至少一个状态信号,来控制电力供应装置。
11.根据上述实施方式的一个方面,该方法还包括:通过电力供应装置连接器和通信连接器将电力供应装置耦接到控制器。该方法还包括:通过隔离阻障部将电力供应装置与控制器电流隔离。该方法还包括:将电力供应装置隔离器耦接到电力供应装置连接器;以及将通信隔离器耦接到通信连接器。
12.根据上述实施方式的另一方面,该方法还包括:通过去抖动器对连接信号进行去抖动处理。
13.根据上述实施方式的又一方面,该方法还包括:响应于连接信号的终止,来终止电力供应装置的电压信号。
14.根据上述实施方式的再一方面,该方法还包括:响应于至少一个状态信号在预定参数之外,来终止电力供应装置的电压信号。
附图说明
15.在本文中参考附图描述本公开的实施方式,其中:
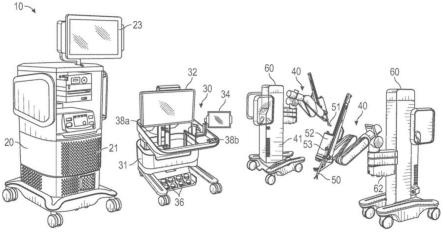
16.图1是根据本公开的包含控制塔、控制台和一个或更多个手术机器人臂的手术机器人系统的示意性说明;
17.图2是根据本公开的图1的手术机器人系统的手术机器人臂的透视图;
18.图3是根据本公开的具有图1的手术机器人系统的手术机器人臂的设置臂的透视图;
19.图4是根据本公开的图1的手术机器人系统的计算机体系结构的示意图;
20.图5是根据本公开的电力供应装置系统的示意性图;以及
21.图6是根据本公开的一个实施方式的图5的电力供应装置系统的塔式电力供应装置机架示意图;
22.图7是根据本公开的另一实施方式的图5的电力供应装置系统的塔式电力供应装
置机架的示意图;
23.图8是根据本公开的一个实施方式的图5的电力供应装置系统的用于对ac输入进行控制的控制电路的示意图;
24.图9是根据本公开的另一实施方式的图5的电力供应装置系统的用于对ac输入进行控制的控制电路的示意图;和
25.图10是根据本公开的又一实施方式的图5的电力供应装置系统的用于对ac输入进行控制的控制电路的示意图。
具体实施方式
26.参考附图详细描述本公开的手术机器人系统的实施方式,其中相似的附图标记指代若干视图的每个视图中的相同或对应的元件。如本文所使用,术语“远侧”是指手术机器人系统和/或耦接到手术机器人系统的手术器械的更接近患者的部分,而术语“近侧”是指更远离患者的部分。
27.术语“应用程序”可以包含被设计成执行功能、任务或活动以使用户受益的计算机程序。应用程序可以指例如作为独立程序或在网络浏览器中本地或远程运行的软件,或本领域的技术人员将其理解为应用程序的其它软件。应用程序可以在控制器上或在用户设备上运行,包括例如在移动设备、iot设备或服务器系统上运行。
28.如下文将详细描述的,本公开涉及一种手术机器人系统,其包含手术控制台、控制塔和一个或更多个可移动推车,所述可移动推车具有耦接到设置臂的手术机器人臂。手术控制台通过一个或更多个接口设备接收用户输入,该用户输入由控制塔解释为用于移动手术机器人臂的移动命令。手术机器人臂包括控制器,所述控制器被配置成处理移动命令并产生用于启动机器人臂的一个或更多个致动器的扭矩命令,所述一个或更多个致动器进而会响应于移动命令而使机器人臂移动。
29.参考图1,手术机器人系统10包含控制塔20,其连接到包含手术控制台30和一个或更多个机器人臂40的手术机器人系统10的所有部件。机器人臂40中的每个机器人臂包括以可拆卸方式耦接到该机器人臂的手术器械50。机器人臂40中的每个机器人臂还耦接到可移动推车60。
30.手术器械50被配置用于在微创手术程序期间使用。在实施方式中,手术器械50可被配置用于开放式手术程序。在实施方式中,手术器械50可以是被配置成为用户提供视频馈送的内窥镜。在进一步的实施方式中,外科器械50可以是电手术钳,该电手术钳被配置成通过夹爪构件之间的压缩组织并向其施加电手术电流来将组织进行密封。在又一些实施方式中,手术器械50可以是手术缝合器,该手术缝合器包括一对夹爪,该一对夹爪被配置成在部署多个组织紧固件(例如,缝合件)以及切割缝合的组织的同时抓住和夹住组织。
31.机器人臂40中的每个机器人臂可以包括被配置成捕捉手术部位的视频的相机51。相机51可以是立体相机并且可以与手术器械50一起放置在机器人臂40上。手术控制台30包括第一显示器32和第二显示器设备34,所述第一显示器显示由放置在机器人臂40上的手术器械50的相机51提供的手术部位的视频馈送,所述第二显示器设备显示用于对手术机器人系统10进行控制的用户界面。手术控制台30还包含多个用户接口设备,例如由用户使用以远程控制机器人臂40的脚踏板36和一对手柄控制器38a和38b。
32.控制塔20包括显示器23,该显示器可以是触摸屏,并在图形用户界面(gui)上进行输出。控制塔20还充当手术控制台30与一个或更多个机器人臂40之间的接口。特别地,控制塔20被配置成:基于来自手术控制台30的一组可编程指令和/或输入命令来对机器人臂40进行控制,例如使机器人臂40和对应的手术器械50移动,以此方式使得机器人臂40和手术器械50响应于来自脚踏板36和手柄控制器38a和38b的输入而执行所需的移动序列。
33.控制塔20、手术控制台30和机器人臂40中的每一者包含相应计算机21、31、41。计算机21、31、41使用基于有线或无线通信协议的任何合适的通信网络来彼此互连。如本文所使用的术语“网络”,无论是复数还是单数,都表示数据网络,包括但不限于因特网、内联网、广域网或局域网,且不限于如由本公开涵盖的通信网络定义的完整范围。合适的协议包括但不限于传输控制协议/因特网协议(transmission control protocol/internet protocol,tcp/ip)、数据报协议/因特网协议(datagram protocol/internet protocol,udp/ip)和/或数据报拥塞控制协议(datagram congestion control protocol,dccp)。可经由一个或更多个无线配置实现无线通信,例如射频、光学、wi-fi、蓝牙(开放式无线协议,其用于使用短长度无线电波来离固定设备和移动设备跨短距离交换数据,同时创建个人局域网(pan)、(用于基于用于无线个人局域网(wpan)的ieee 802.15.4-2003标准使用小型低功率数字无线电装置的一套高层通信协议的规范))。
34.计算机21、31、41可包括以可操作方式连接到存储器(未示出)的任何合适的处理器(未示出),所述存储器可包括下述一者或更多者:易失性、非易失性、磁性、光学或电介质,例如只读存储器(rom)、随机存取存储器(ram)、电可擦除可编程rom(eeprom)、非易失性ram(nvram)或快闪存储器。处理器可以是适于执行本公开中描述的操作、计算和/或指令集的任何合适的处理器(例如,控制电路),包含(但不限于)硬件处理器、现场可编程门阵列(fpga)、数字信号处理器(dsp)、中央处理单元(cpu)、微处理器和其组合。本领域技术人员将理解,可以通过使用适用于执行本文所述的算法、计算和/或指令集的任何逻辑处理器(例如,控制电路)来替代处理器。
35.参考图2,机器人臂40中的每个机器人臂可包含多个连杆42a、42b、42c,所述多个连杆分别在接头44a、44b、44c处互连。接头44a被配置成将机器人臂40紧固到可移动推车60并限定第一纵向轴线。参考图3,可移动推车60包含升降机61和设置臂62,所述设置臂提供用于安装机器人臂40的基座。升降机61允许设置臂62竖向地移动。可移动推车60还包括用于显示与机器人臂40有关的信息的显示器69。
36.设置臂62包括第一连杆62a、第二连杆62b和第三连杆62c,这些连杆实现机器人臂40的侧向可操作性。连杆62a、62b、62c在接头63a和63b处互连,每个接头可包含用于使连杆62b与62b相对于彼此和连杆62c旋转的致动器(未示出)。特别地,连杆62a、62b、62c在其彼此平行的对应侧向平面中是可移动的,由此允许机器人臂40相对于患者(例如,手术台)延伸。在实施方式中,机器人臂40可耦接到手术台(未示出)。设置臂62包括用于对连杆62a、62b、62c以及升降机61的移动进行调整的控制件65。
37.第三连杆62c包括具有两个自由度的可旋转基座64。特别地,可旋转底座64包含第一致动器64a和第二致动器64b。第一致动器64a围绕垂直于由第三连杆62c限定的平面的第一固定臂轴是可旋转的,以及第二致动器64b围绕横向于第一固定臂轴的第二固定臂轴是可旋转的。第一致动器64a和第二致动器64b允许机器人臂40的全三维定向。
38.机器人臂40还包括放置在器械驱动单元52和设置臂62上的多个手动超控按钮53,其可以在手动模式下使用。用户可以按下按钮53之一来移动与按钮53相关联的部件。
39.参考图2,机器人臂40还包括固持器46,该固持器限定第二纵向轴线且该固持器被配置成接纳手术器械50的器械驱动单元52(图1),所述器械驱动单元被配置成耦接到手术器械50的致动机构。器械驱动单元52将致动力从其致动器传递到手术器械50以致动手术器械50的部件(例如,末端执行器)。固持器46包括滑动机构46a,所述滑动机构被配置成沿着由固持器46限定的第二纵向轴线来移动器械驱动单元52。固持器46还包含接头46b,所述接头使固持器46相对于连杆42c旋转。
40.接头44a和44b包括致动器48a和48b,所述致动器被配置成通过一系列带45a和45b或其它机械连杆机构而相对于彼此来驱动接头44a、44b、44c,所述机械连杆机构例如是驱动杆、线缆或杠杆等。特别地,致动器48a被配置成使机器人臂40围绕由连杆42a限定的纵向轴线旋转。
41.接头44b的致动器48b通过带45a耦接到接头44c,且接头44c又通过带45b耦接到接头46c。接头44c可包含将带45a和45b耦接的分动箱,使得致动器48b被配置成使连杆42b、42c中的每一者与固持器46相对于彼此旋转。更具体地,连杆42b、42c和固持器46被动地耦接到致动器48b,所述致动器围绕枢轴点“p”实施旋转,所述枢轴点“p”位于由连杆42a限定的第一轴线与由固持器46限定的第二轴线的相交点处。因此,致动器48b控制第一轴线和第二轴线之间的角度θ,从而允许对手术器械50进行定向。由于连杆42a、42b、42c与固持器46通过带45a和45b互连,连杆42a、42b、42c与固持器46之间的角度也被调整以便实现期望的角度θ。在实施方式中,接头44a、44b、44c中的一些或全部可包含致动器以避免需要机械连杆机构。
42.参考图4,手术机器人系统10的计算机21、31、41中的每一者均可包括多个控制器,所述控制器可以硬件和/或软件方式实施。控制塔20的计算机21包括控制器21a和安全观察器21b。控制器21a从手术控制台30的计算机31接收关于手柄控制器38a和38b的当前位置和/或定向以及脚踏板36和其它按钮的状态的数据。控制器21a处理这些输入位置以确定机器人臂40的每个接头和/或器械驱动单元52所需的驱动命令,并将这些命令传达到机器人臂40的计算机41。控制器21a还接收回实际接头角度并使用此信息,以确定被传输回到手术控制台30的计算机31的力反馈命令,以通过手柄控制器38a和38b提供触觉反馈。安全观察器21b对进出控制器21a的数据进行有效性检查,并在检测到数据传输中存在错误的情况下通知系统故障处理器,以将计算机21和/或手术机器人系统10置于安全状态。
43.计算机41包含多个控制器,即:主推车控制器41a、设置臂控制器41b、机器人臂控制器41c和器械驱动单元(idu)控制器41d。主推车控制器41a接收并处理来自计算机21的控制器21a的接头命令,并将该接头命令传达给设置臂控制器41b、机器人臂控制器41c和idu控制器41d。主推车控制器41a还对器械交换以及可移动推车60、机器人臂40和器械驱动单元52的总体状态进行管理。主推车控制器41a还将实际接头角度传送回到控制器21a。
44.设置臂控制器41b对接头63a和63b中的每一者以及设置臂62的可旋转基座64进行控制,以及针对俯仰轴计算期望的电机移动命令(例如,电机扭矩)并对制动器进行控制。机器人臂控制器41c对机器人臂40的每个接头44a和44b进行控制,并计算机器人臂40的重力补偿、摩擦补偿和闭环位置控制所需的期望电机扭矩。机器人臂控制器41c基于计算出的扭
矩来计算移动命令。接着将计算出的电机命令传达到机器人臂40中的致动器48a和48b中的一者或更多者。接着通过致动器48a和48b将实际接头位置传输回到机器人臂控制器41c。
45.idu控制器41d接收手术器械50的期望接头角度,例如手腕和夹爪度,并计算用于器械驱动单元52中的电机的期望电流。idu控制器41d基于电机位置而计算实际角度并且将实际角度传输回到主推车控制器41a。
46.机器人臂40被进行如下控制。首先,对机器人臂40进行控制的手柄控制器(例如手柄控制器38a)的姿势通过控制器21a执行的手眼转换功能被转换成机器人臂40的期望姿势。手眼功能以及本文描述的其它功能体现在可由控制器21a或本文描述的任何其它合适的控制器执行的软件中。手柄控制器38a中的一个手柄控制器的姿势可体现为相对于坐标参考框架的坐标位置和滚转-俯仰-偏航(“rpy”)定向,所述坐标参考框架固定到手术控制台30。器械50的期望姿势与机器人臂40上的固定框架相关。然后,通过由控制器21a执行的缩放功能来缩放手柄控制器38a的姿势。在实施方式中,通过缩放功能将坐标位置缩小并将定向放大。另外,控制器21a还执行离合(clutching)功能,所述离合功能使手柄控制器38a与机器人臂40脱离。特别地,如果超出某些移动限制或其它阈值,那么控制器21a停止将移动命令从手柄控制器38a传输到机器人臂40,并且实质上起到虚拟离合器机构的作用,例如将对机械输出有影响的机械输入进行限制。
47.机器人臂40的期望姿势是基于手柄控制器38a的姿势,且该期望姿势接着由控制器21a执行的逆运动学函数传递。逆运动学函数计算机器人臂40的接头44a、44b、44c的角度,所述角度实现由手柄控制器38a输入的被缩放和调整的姿势。所计算的角度然后被传送到机器人臂控制器41c,其包括具有比例-微分(pd)控制器的接头轴线控制器、摩擦估计器模块、重力补偿器模块和双侧饱和块,双侧饱和块被配置成对接头44a、44b、44c的电机的命令扭矩进行限制。
48.参考图5,机器人系统10包括容置在控制塔20中的电力供应装置系统200。可移动推车60中的每个可移动推车通过具有连接器74的线缆72电耦接到电力供应装置系统200。电力供应装置系统200包括耦接到提供交流电的主电力供应装置的电力入口模块202和隔离变压器206。电力供应装置系统200还包括耦接到隔离变压器206的一个或更多个不中断电力供应装置(“ups”)208。ups 208提供备用电力并且耦接到塔式电力供应装置机架(“tpsc”)210。在实施方式中,tpsc 210包括多个电力供应装置212a-d,该多个电力供应装置212a-d被配置成向可移动推车60中的每个可移动推车提供经调节的dc输出。电力供应装置212a-d可以是ac/dc转换器。因此,tpsc 210包括多个电力供应装置212a-d,一个电力供应装置用于可移动推车60中的每个可移动推车,使得电力供应装置212a-d中的每个电力供应装置向单个可移动推车60供电。
49.参考图6,tpsc 210可以设置在印刷电路板组件(“pcba”)250上,该印刷电路板组件具有多个电力控制部件以将受控的dc输出传送到可移动推车60。电力供应装置212a-d中的每个电力供应装置包括电力供应装置控制连接器214和通信连接器215。为简单起见,仅示出了电力供应装置212a。电力供应装置控制连接器214对控制和状态信号进行传输,以启用主电力dc输出。状态信号可以包括:电力供应装置212a的电力状态、将电力供应装置212a进行冷却的风扇的风扇状态、以及电力供应装置212a的温度的过温状态。通信连接器215可以是与控制器21的任何合适的通信总线的一部分,例如pmbus接口、smbus接口、i2c接口等,
从而允许控制器21监测电力供应装置212a的输出电压、电流和温度。电力供应装置212a可以包括多个输出,例如用于为可移动推车60供电的主电力dc输出。输出可以是从大约24伏到大约48伏。电力供应装置212a还可以包括外围输出,该外围输出可以是大约12伏和300毫安,以为tpsc 210的各种电路部件供电。外围输出用于向包括数字隔离器216和通信总线隔离器218的隔离阻障部215供电,这些隔离器将电力供应装置212a电流隔离。隔离阻障部215确保来自每个电力供应装置212a的输出相对于彼此以及相对于保护性接地连接是浮动的。这允许隔离阻障部215限制单个故障条件的发生以免影响多于一个可移动推车60。
50.继续参考图6,隔离阻障部220被示出为虚线边框。电力供应装置212a的外围输出为隔离阻障部215提供电力,该电力通过电力供应装置控制连接器214供应。外围输出可以处于第一电压电平,例如大约12vdc,并且可以被调节到较低的电压,例如大约3.3vdc,以为数字隔离器216和通信总线隔离器218供电。tpsc 210包括tpsc控制器222,其与数字隔离器216和通信总线隔离器218通信。数字隔离器216使tpsc控制器222能够控制电力供应装置212a-d的输出。具体而言,tpsc控制器222基于来自电力供应装置212a的状态信号而输出“电力供应装置输出使能”(ps_en)信号。数字隔离器216使tpsc控制器222能够读取电力供应装置212a的输出电压、电流和温度。tpsc控制器222还包括线缆状态检测电路223,该线缆状态检测电路监测来自可移动推车60的线缆状态信号,以确定可移动推车60是否通过线缆72的连接器74连接到tpsc 210(图5)。当可移动手推车60连接到tpsc 210时,可移动手推车60周期性地输出线缆状态信号。线缆状态检测电路223包括去抖动器224,其产生清晰的数字信号,以限制由于连接器74的间歇性连接而产生的噪声。因此,tpsc控制器222基于线缆状态信号、状态信号和电力供应装置212a的输出来控制电力供应装置212a的输出。特别地,如果线缆状态信号被中断和/或状态信号或输出信号之一在预定参数之外,则tpsc控制器222终止电力供应装置212a的输出。
51.tpsc 210包括用于可移动推车60中的每个可移动推车的单独的隔离阻障部220。隔离阻障部220中的每个隔离阻障部彼此独立,并且独立于pcba250的其余部分,如果发生任何单个故障,达一个电力供应装置212a-d受到影响。如果pcba 250发生任何故障,例如pcba 250上的电力供应装置故障、断电或软件完全停止,则在故障之前存在的电力供应装置212a的输出状态将丢失。此外,断开将可移动推车50连接到tpsc 210的线缆72将切断电力供应装置212a的输出。
52.图7示出了pcba 350的另一实施方式,其基本上类似于pcba 250,因此描述了类似的部件,例如隔离阻障部320、通信总线隔离器318、tpsc控制器322、线缆状态检测电路323、去抖动器324、它们的功能以及通过它们传输的信号被省略。在pcba 350中,tpsc控制器322是完全隔离的,线缆状态信号包含在隔离阻障部320中。
53.隔离阻障部320包括输入/输出扩展器316,该输入/输出扩展器耦接到具有去抖动器324的线缆状态检测电路323,以用于从可移动推车60接收线缆状态信号。去抖动器324防止线缆状态信号的间歇性连接或噪声切断电力供应装置212a的输出。输入/输出扩展器316还以并联方式耦接到电力供应装置控制连接器314和通信连接器315。输入/输出扩展器316通过提供电流分离的通信总线隔离器318和光耦合器319耦接到tpsc控制器322。输入/输出扩展器316使tpsc控制器322能够读取电力供应装置212a的状态信号、输出电压、电流和温度,tpsc控制器322使用这些状态信号、输出电压、电流和温度来控制电力供应装置212a的
输出。特别地,tpsc控制器322通过输出开启ps_en信号来控制电力供应装置212a的输出。
54.电力供应装置212a的外围输出为隔离阻障部320提供电力,该电力通过电力供应装置控制连接器314a供应。外围输出可以处于第一电压电平,例如大约12vdc,并且可以被调节到较低电压,例如大约3.3vdc,以为输入/输出扩展器316和通信总线隔离器318供电。
55.当线缆状态信号指示可移动推车60附接到tpsc 210时,tpsc控制器322通过对由输入/输出扩展器316驱动的信号的输出状态进行控制来激活电力供应装置212a。因此,ps_en信号的状态取决于线缆状态信号和tpsc控制器322上运行的软件。如果可移动推车60和tspc 210之间的线缆断开连接,则电力供应装置212a的输出被自动关闭。即使tpsc控制器322停止操作,用于确定ps_en信号的状态的软件编程值保持不变,并且电力供应装置212a继续向附接的可移动推车60供电。
56.在实施方式中,输入/输出扩展器316可以包括中断输出,如果供应给输入/输出扩展器316的任何数字输入改变状态,则激活该中断输出。该配置可用于为tpsc控制器322提供轮询的替代方案,以用于监测电力供应装置212a的状态信号。在进一步的实施方式中,输入/输出扩展器316可以由微控制器代替。输入/输出扩展器316的功能可以由在微控制器上运行的软件复制,该软件也可以用于提供附加功能。
57.参考图8,电力入口模块202包含电力供应装置定序器400,该电力定序器耦接到三个ac线路输入204a、204b、204c。电力定序器400将ac线路输入204a、204b、204c错开到三个电力供应装置212a-c,以对到tpsc 210的浪涌电流进行限制。电力供应装置212d直接连接到tpsc 210的ac输入并且不连接到电力定序器400并且在图8中未示出。电力入口模块202还包括多个固态继电器(ssr)205a、205b、205c,每个固态继电器分别耦接到三个ac线路输入204a、204b、204c。ssr 205a-c可以由tpsc 210的板载电力供应装置207供应的12vdc信号来激活。电力定序器400将信号驱动到ssr 205a-c,ssr 205a-c将ac线路输入204a-c连接到电力供应装置212a-c的ac输入。信号的时序是这样的,当给每个电力供应装置212a-c加电时出现的高电流时段不重叠。
58.参考图9,示出了用于对ssr 205a-c进行控制的另一控制电路500。控制电路500的电力由板载电力供应装置207以及电力供应装置212d冗余地供应。冗余供应减轻了对ssr 205a-c进行控制的电力损失。此外,三个电力供应装置监控器(supervisor)502a、502b、502c,每个电力供应装置监控器具有逐渐变长的硬件配置时序,这些时序分别控制ssr 205a-c,打开电力供应装置212a-c。控制电路500还包括三个电压调节器501a、501b、501c,每个电压调节器耦接到电力供应装置监控器502a、502b、502c。电压调节器501a、501b、501c对供应给电力供应装置监控器502a、502b、502c的电力进行调节,这些电力供应装置监控器以比供应给控制电路500的12vdc低的电压工作。由于每个电力供应装置监控器502a-c独立于其他电力供应装置监控器,因此不存在潜在的单点故障。
59.参考图10,示出了用于对ssr 205a-c进行控制的另一控制电路600。控制电路600包括电力定序器603,该电力定序器循序地打开电力开关602a-c中的每个电力开关,其依次向隔离的dc/dc转换器604a-c供电。dc/dc转换器604a-c中的每个dc/dc转换器的隔离侧上的输出然后激活板外ssr205a-c。当每个ssr 205a-c被打开时,其对应的电力供应装置212a-c上电并通过对应的电力供应装置控制连接器614a-c激活其输出,电力供应装置控制连接器614a-c类似于上述电力供应装置控制连接器214。dc/dc转换器604a-c和对应电力供
应装置212a-c的输出被提供给二极管-or电路605a-c,从而将电压源彼此隔离。此后,来自dc/dc转换器604a-c中的每个dc/dc转换器的输出保持对应的ssr 205a-c打开,不存在潜在的单点故障。每个电力供应装置212a-c即使在任何隔离的dc/dc转换器604a-c的任何电力损失之后仍保持打开。
60.应理解的是,可以对本文公开的实施方式进行各种修改。在实施方式中,传感器可以设置在机器人臂的任何合适的部分上。因此,以上描述不应解释为限制性的,而仅仅是作为各种实施方式的例证。本领域的技术人员将设想出在随附权利要求书的范围和精神内的其它修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1