一种四自由度穿刺手术机器人的制作方法
1.本发明涉及穿刺手术机器人技术领域,具体是指一种四自由度穿刺手术机器人。
背景技术:
2.传统穿刺活检或者穿刺消融等手术中,医生直接通过影像引导及皮肤上预先设置的标记点确定进针路径,其存在以下问题:1.经验依赖性:要求医师进行大量的练习和实际操练,年轻医师往往需要经历较长的培训阶段方可具备成熟稳定的穿刺操作技术;2.精准性不足:徒手操作的精准性往往取决于操作医师的技术熟练度和稳定性;3.操作损伤及辐射增加:反复调整操作及影像扫描过程增加操作相关损伤以及医患双方的辐射;4.操作疲劳:长时间手术引起操作者疲劳,带来手术效率及稳定性的下降。因此,亟需研发一种以更精准、更稳定、更便捷等优点,与慢性疼痛微创介入手术的需求相契合的穿刺机器人。
技术实现要素:
3.本发明要解决的技术问题是克服上述技术的缺陷,提供一种四自由度穿刺手术机器人。
4.一种四自由度穿刺手术机器人,包括能够实现两个直线平动自由度的第一直线平移装置和第二直线平移装置,及实现两个转动自由度的第一转动装置和第二转动装置,所述第二直线平移装置在第一直线平移装置上直线移动,所述第一转动装置连接于第二直线平移装置,并且在第二直线平移装置直线移动,所述第一转动装置在第二直线平移装置上的直线移动方向与第二直线平移装置在第一直线平移装置上的直线移动方向垂直,所述第二转动装置连接于第一转动装置,所述第一转动装置控制第二转动装置的转动,所述第二转动装置连接有用穿刺工作的末端执行器。
5.进一步地,所述第一直线平移装置和第二直线平移装置均采用螺杆移动机构,包括安装板和设在安装板上的驱动电机,所述驱动电机的输出端传动连接有螺杆,所述螺杆上螺接有螺母,所述螺母连接有连接座,所述螺母通过滑动组件连接于安装座,所述第二直线平移装置的安装板连接于第一直线平移装置的连接座,所述第一转动装置连接于第二直线平移装置的连接座。
6.进一步地,所述第一转动装置包括第一电机,所述第一电机的固定端通过连接板连接于第二直线平移装置的连接座,所述第一电机的输出轴端连接于第二转动装置。
7.进一步地,所述第二转动装置包括外壳和安装在外壳内的第二电机,所述第二电机通过电机安装板连接于第一电机的输出轴端,所述第二电机的输出轴端连接有连杆,所述连杆的一端连接于末端执行器,所述末端执行器设在外壳远离第一转动装置的一端,所述第二电机的输出轴转动通过连杆带动末端执行器围绕末端执行器与外壳的连接处转动。
8.进一步地,所述第一电机的输出轴端和第二电机的输出轴端均设有光电开关装置分别控制电机安装板和连杆的转动位置的变化,所述光电开关装置包括光电开关安装板、设在光电开关安装板上的若干光电开关和光耦挡片;
9.所述第一电机的输出轴端的光电开关装置中,若干光电开关围绕第一电机的输出轴轴线呈圆周分布,光电开关安装板不随第一电机的输出轴转动,光耦挡片一端固定于电机安装板,另一端与光电开关位置对应设置;
10.所述第二电机的输出轴端的光电开关装置中,若干光电开关围绕第二电机的输出轴轴线呈圆周分布,光电开关安装板与电机安装板相对固定,不随第二电机的输出轴转动,光耦挡片一端固定于第二电机的输出轴端,与连杆同步转动,另一端与光电开关位置对应设置。
11.进一步地,螺杆移动机构的驱动电机与螺杆之间通过齿轮实现传动。
12.进一步地,所述滑动组件包括设在螺母两端的滑槽和设在安装板上的与滑槽匹配的滑杆。
13.进一步地,所述末端执行器呈l型,弯折处通过转轴连接于外壳,所述末端执行器上设有让位腔,所述连杆一端伸入让位腔转动连接于末端执行器。
14.进一步地,所述第一电机和第二电机均配置有减速机。
15.本发明优点:本发明设计新颖,结构合理,更精准、更稳定、更便捷,能够有效完成穿刺手术,能够与慢性疼痛微创介入手术的需求相契合的穿刺机器人;通过一个四自由度机器人实现穿刺路径中穿刺位置及穿刺角度的自动定位;四个自由度的机器人包括两个直线平动自由度及两个转动自由度;两个直线平动自由度采用螺杆移动机构,可以实现高精度的位置定位;两个转动自由度采用电机减速机组直接驱动,可以最大限度减小角度定位误差,避免多个连杆铰点导致的角度定位精度较低的问题。
附图说明
16.图1是本发明一种四自由度穿刺手术机器人的立体示意图;
17.图2是本发明一种四自由度穿刺手术机器人的螺杆移动机构示意图;
18.图3是本发明图2中a处放大示意图;
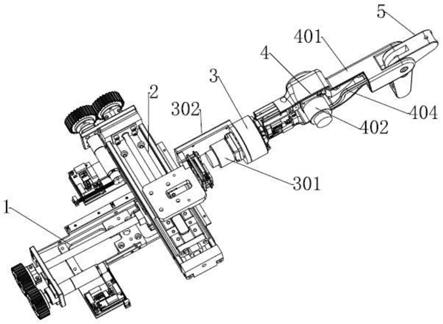
19.图4是本发明一种四自由度穿刺手术机器人的第一转动装置和第二转动装置示意图;
20.图5是本发明图4中b处放大示意图;
21.图6是本发明图4中c处放大示意图;
22.图7是本发明一种四自由度穿刺手术机器人的末端执行机构示意图。
23.如图所示:1、第一直线平移装置;2、第二直线平移装置;3、第一转动装置;4、第二转动装置;5、末端执行器;6、滑动组件;7、光电开关装置;101、安装板;102、驱动电机;103、螺杆;104、螺母;105、连接座;301、第一电机;302、连接板;401、外壳;402、第二电机;403、电机安装板;404、连杆;501、转轴;502、让位腔;601、滑槽;602、滑杆;701、光电开关安装板;702、光电开关;703、光耦挡片。
具体实施方式
24.下面结合附图对本发明做进一步的详细说明。
25.如图1所示,一种四自由度穿刺手术机器人,包括能够实现两个直线平动自由度的第一直线平移装置1和第二直线平移装置2,及实现两个转动自由度的第一转动装置3和第
二转动装置4,所述第二直线平移装置2在第一直线平移装置1上直线移动,所述第一转动装置3连接于第二直线平移装置2,并且在第二直线平移装置2直线移动,所述第一转动装置3在第二直线平移装置2上的直线移动方向与第二直线平移装置2在第一直线平移装置1上的直线移动方向垂直,所述第二转动装置4连接于第一转动装置3,所述第一转动装置3控制第二转动装置4的转动,所述第二转动装置4连接有用穿刺工作的末端执行器5。
26.如图2和图3所示,实现两个转动自由度的第一直线平移装置1和第二直线平移装置2均采用螺杆移动机构,包括安装板101和设在安装板101上的驱动电机102,所述驱动电机102的输出端传动连接有螺杆103,所述螺杆103上螺接有螺母104,所述螺母104连接有连接座105,所述螺母104通过滑动组件6连接于安装座101,所述第二直线平移装置2的安装板101连接于第一直线平移装置1的连接座105,所述第一转动装置3连接于第二直线平移装置2的连接座105,所述滑动组件6包括设在螺母104两端的滑槽601和设在安装板101上的与滑槽601匹配的滑杆602,螺杆移动机构的驱动电机102与螺杆103之间通过齿轮实现传动,两个直线平动自由度采用螺杆移动机构,可以实现高精度的位置定位。
27.如图4、图5和图6所示,所述第一转动装置3包括第一电机301,所述第一电机301的固定端通过连接板302连接于第二直线平移装置2的连接座105,所述第一电机301的输出轴端连接于第二转动装置4,所述第二转动装置4包括外壳401和安装在外壳401内的第二电机402,所述第二电机402通过电机安装板403连接于第一电机301的输出轴,所述第二电机402的输出轴端连接有连杆404,所述连杆404的一端连接于末端执行器5,所述末端执行器5设在外壳401远离第一转动装置3的一端,所述第二电机402的输出轴转动通过连杆404带动末端执行器5围绕末端执行器5与外壳401的连接处转动,所述第一电机301和第二电机402均配置有减速机;
28.所述第一电机301的输出轴端和第二电机402的输出轴端均设有光电开关装置7分别控制电机安装板403、连杆404的转动,所述光电开关装置7包括光电开关安装板701、设在光电开关安装板701上的若干光电开关702和光耦挡片703;
29.所述第一电机301的输出轴端的光电开关装置7中,若干光电开关702围绕第一电机301的输出轴轴线呈圆周分布,光电开关安装板701不随第一电机301的输出轴转动,光耦挡片703一端固定于电机安装板403,另一端与光电开关702位置对应设置;
30.所述第二电机402的输出轴端的光电开关装置7中,若干光电开关702围绕第二电机402的输出轴轴线呈圆周分布,光电开关安装板701与电机安装板403相对固定,不随第二电机402的输出轴转动,光耦挡片703一端固定于第二电机402的输出轴端,与连杆404同步转动,另一端与光电开关702位置对应设置。
31.如图7所示,所述末端执行器5呈l型,弯折处通过转轴501连接于外壳401,所述末端执行器5上设有让位腔502,所述连杆404一端伸入让位腔502转动连接于末端执行器5,末端执行器用于安装穿刺用工具。
32.本发明其学习曲线短:机器人可以自动定位医生通过三维影像规划的进针路径,操作便捷,对医生经验依赖性小;精准性高:机器人定位精度高,较医生徒手操作优势明显;减少医患双方承受辐射量:机器人定位精度高,减少反复调整操作及影像扫描过程,减少操作相关损伤以及医患双方的辐射;操作稳定:机器人操作稳定性高,规避医生长时间手术产生的疲劳导致的操作稳定性下降。
33.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1