一种多区位操作的外科手术机器人
1.本发明涉及一种医疗设备技术领域,尤其涉及一种多区位操作的外科手术机器人。
背景技术:
2.微创手术器械操控系统被设计为在内窥镜下,由医生在手术室内操作,控制手术器械做手术的设备系统。医生坐在医生操作台前,通过观看3d影像显示器,操作医生机械臂,医生可如同平常手术般,利用患者机械臂精准的控制手术器械执行各种手术动作。
3.参考专利申请号为:cn202010421613.8的专利,公开了一种多区位操作的外科手术机器人,包括:复数个滑动组件,与滑动组件配合连接的导向件;复数个所述滑动组件并列设置,所述滑动组件包括第一滑动件与第二滑动件,所述第一滑动件与所述第二滑动件均为弧形结构;所述滑动组件的内侧设置有导轨,所述导轨上配合连接有病床,所述病床能够沿所述导轨滑动,所述导轨上沿长度方向间隔设置有若干个第一传感器,所述病床底部设置有滚轮,所述滚轮上设置有至少一个第二传感器,所述第一传感器与所述第二传感器能够实现信号传输;所述导向件与所述滑动组件一一对应,复数个所述导向件不相交,所述导向件内侧设置有至少一个机械手,复数个机械手配合能够形成交叠区。上述专利中患者躺在病床上手术时,由于病床只能水平移动无法上下调节,手术时的局限性较大,而且病床底部设置的滚轮虽然能够方便病床移动,但是在手术时病床容易移动,导致患者与手术器具之间的位置发生位移,手术风险较大,并且无法快速切换手术器具,影响工作效率。
技术实现要素:
4.(1)要解决的技术问题
5.本发明为了克服患者躺在病床上手术时,由于病床只能水平移动无法上下调节,手术时的局限性较大,而且手术风险较大,无法快速切换手术器具,影响工作效率的缺点,本发明要解决的技术问题是提供一种能够多角度调节手术角度、手术风险小、能够快速切换手术器具、提高工作效率的多区位操作的外科手术机器人。
6.(2)技术方案
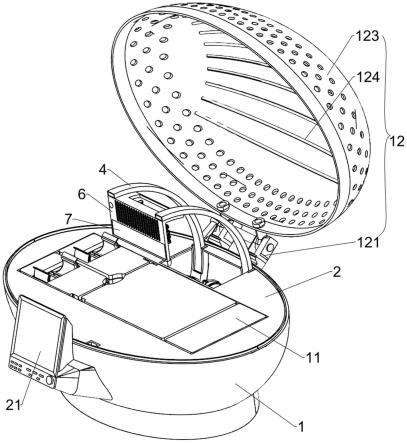
7.为了解决上述技术问题,本发明提供了这样一种多区位操作的外科手术机器人,包括有操作台、台面、控制面板、弧形导轨、弧形导杆、调节螺栓、安装板、透明板、移动机构和操作机构,操作台顶部连接有台面,操作台前端面上部连接有控制面板,操作台内底部左右两侧均连接有弧形导轨,左右两侧的弧形导轨上均滑动式地连接有弧形导杆,弧形导轨的后侧螺纹连接有调节螺栓,调节螺栓贯穿操作台后端面,两根弧形导杆的尾端之间连接有安装板,台面顶部后侧开有通孔,通孔用于收纳安装板,安装板下部连接有透明板,安装板的后侧面安装有调整手术位置的移动机构,移动机构上连接有代替人工手术的操作机构。
8.优选地,移动机构包括有横导轨、导向架、齿条、马达、驱动齿轮、第一皮带轮、平皮
带和电动滑轨,安装板后端面中部水平连接有横导轨,横导轨上滑动式地连接有导向架,导向架顶部连接有齿条,安装板后端面左侧安装有马达,安装板后端面右侧与马达的输出轴上均连接有驱动齿轮,右侧的驱动齿轮与安装板转动式连接,两个驱动齿轮均与齿条啮合,两个驱动齿轮的后端均连接有第一皮带轮,两个第一皮带轮之间绕接有平皮带,导向架中部安装有电动滑轨,操作机构安装在电动滑轨上,马达和电动滑轨均与控制面板电性连接。
9.优选地,操作机构包括有电动转盘、电动推杆、机械手、三爪卡盘、手术器具和摄像头,电动滑轨上安装有电动转盘,电动转盘上均匀间隔地连接有电动推杆,电动推杆的伸缩杆上连接有机械手,机械手上连接有三爪卡盘,三爪卡盘上卡接有手术器具,三爪卡盘上安装有摄像头,电动转盘、电动推杆、机械手和摄像头均与控制面板电性连接。
10.优选地,还包括有用于驱动弧形导杆移动的驱动机构,驱动机构包括有轴承座、转轴、驱动轮、减速电机、第二皮带轮和传动带,操作台内后侧壁上安装有轴承座,轴承座上转动式地连接有转轴,转轴的左右两端均连接有驱动轮,驱动轮与弧形导杆内侧面接触,操作台内底部后侧安装有减速电机,减速电机的输出轴上与转轴中部均连接有第二皮带轮,两个第二皮带轮之间绕接有传动带。
11.优选地,还包括有调节手术患者位置的升降机构,升降机构包括有液压升降器、床架、头拖架、气缸和软垫,操作台内底部中间安装有液压升降器,液压升降器的升降杆上连接有床架,台面中部开有用于床架活动的方形孔,床架的右侧铰接连接有头拖架,头拖架底部与床架底部右侧之间铰接安装有气缸,床架和头拖架的顶部均连接有软垫。
12.优选地,还包括有防止手术患者被外界干扰的防干扰机构,防干扰机构包括有支撑座、转杆、单向透视盖和灯带,操作台的后端面上部连接有支撑座,支撑座上转动式地连接有转杆,转杆上固接有完全罩住台面的单向透视盖,单向透视盖内侧顶部均匀间隔地连接有对手术时提供照明的灯带。
13.优选地,还包括有固定手术患者腿部的固定机构,固定机构包括有连接杆、第一缸体、n形活塞杆、横板、固定杆、弧形夹板、连杆、第二缸体、导液管、l形活塞杆、复位弹簧和拨杆,床架底部左侧连接有连接杆,连接杆上连接有第一缸体,第一缸体内滑动式地连接有n形活塞杆,n形活塞杆的尾端连接有横板,床架左侧连接有两根固定杆,两根固定杆前后对称设置,两根固定杆上均转动式地连接有两块弧形夹板,弧形夹板的底部均转动式地连接有连杆,前侧的两根连杆与横板的前端铰接连接,后侧的两根连杆与横板的后端铰接连接,床架的后端面左部连接有第二缸体,第二缸体后侧与第一缸体底部之间连接有导液管,第二缸体上滑动式地连接有l形活塞杆,l形活塞杆与第二缸体内后壁之间连接有复位弹簧,转杆的左端连接有驱动l形活塞杆移动的拨杆。
14.优选地,单向透视盖的下部周向均匀间隔地开有透气孔。
15.(3)有益效果
16.1、本发明设置的移动机构能够方便手术时调节手术器具的左右位置,升降机构能够方便调节患者与手术器具之间的上下位置,而且可以根据手术需要对患者的头部进行垫高,实现多角度调节,降低手术难度,提高工作效率。
17.2、设置的操作机构可便于切换手术器具进一步提高了工作效率,通过防干扰机构使得患者无法透过单向透视盖看到外部环境,避免患者受到外界干扰,医生可将透过单向透视盖看到内部环境,并与观察手术情况。
18.3、通过固定机构固定手术时患者的腿部,避免插管全麻手术时患者无意识的运动,从而降低手术时因病人运动带来的风险。
附图说明
19.图1为本发明的第一种立体结构示意图。
20.图2为本发明的第二种立体结构示意图。
21.图3为本发明的第一种剖视图。
22.图4为本发明移动机构和操作机构的立体结构示意图。
23.图5为本发明移动机构的立体结构示意图。
24.图6为本发明操作机构的立体结构示意图。
25.图7为本发明操作机构的局部立体结构示意图。
26.图8为本发明操作机构的工作状态图。
27.图9为本发明第二种剖视图。
28.图10为本发明升降机构和固定机构的第一种立体结构示意图。
29.图11为本发明升降机构和固定机构的第二种立体结构示意图。
30.图12为本发明固定机构的局部立体结构示意图。
31.图13为本发明单向透视盖关闭状态的立体结构示意图。
32.图14为图13删除单向透视盖的立体结构示意图。
33.附图中的标记为:1-操作台,2-台面,21-控制面板,3-弧形导轨,4-弧形导杆,5-调节螺栓,6-安装板,7-透明板,8-移动机构,81-横导轨,82-导向架,83-齿条,84-马达,85-驱动齿轮,86-第一皮带轮,87-平皮带,88-电动滑轨,9-操作机构,91-电动转盘,92-电动推杆,93-机械手,94-三爪卡盘,95-手术器具,96-摄像头,10-驱动机构,101-轴承座,102-转轴,103-驱动轮,104-减速电机,105-第二皮带轮,106-传动带,11-升降机构,111-液压升降器,112-床架,113-头拖架,114-气缸,115-软垫,12-防干扰机构,121-支撑座,122-转杆,123-单向透视盖,124-灯带,13-固定机构,131-连接杆,132-第一缸体,133-n形活塞杆,134-横板,135-固定杆,136-弧形夹板,137-连杆,138-第二缸体,139-导液管,1310-l形活塞杆,1311-复位弹簧,1312-拨杆。
具体实施方式
34.下面结合附图和实施例对本发明作进一步的说明。
35.实施例1
36.一种多区位操作的外科手术机器人,如图1-8所示,包括有操作台1、台面2、控制面板21、弧形导轨3、弧形导杆4、调节螺栓5、安装板6、透明板7、移动机构8和操作机构9,操作台1顶部通过螺栓连接的方式连接有台面2,操作台1前端面上部通过螺栓连接的方式连接有控制面板21,操作台1内底部左右两侧均通过焊接连接的方式连接有弧形导轨3,弧形导轨3内部中空设置,左右两侧的弧形导轨3内部均滑动式地连接有弧形导杆4,弧形导杆4内部中空,弧形导杆4中空部分用于线路走线,弧形导轨3的后侧螺纹连接有调节螺栓5,调节螺栓5贯穿操作台1后端面,调节螺栓5后端固接有梅花旋钮,两根弧形导杆4的尾端之间焊接连接有安装板6,台面2顶部后侧开有通孔,通孔用于收纳安装板6,安装板6下部连接有玻
璃板,安装板6的后侧面安装有调整手术位置的移动机构8,移动机构8上连接有代替人工手术的操作机构9;移动机构8包括有横导轨81、导向架82、齿条83、马达84、驱动齿轮85、第一皮带轮86、平皮带87和电动滑轨88,安装板6后端面中部水平连接有燕尾形横导轨81,横导轨81上滑动式地连接有导向架82,导向架82顶部通过螺栓连接的方式连接有齿条83,齿条83呈水平设置,安装板6后端面左侧安装有马达84,安装板6后端面右侧与马达84的输出轴上均连接有驱动齿轮85,右侧的驱动齿轮85与安装板6通过轴杆转动式连接,两个驱动齿轮85均与齿条83啮合,两个驱动齿轮85的后端均连接有第一皮带轮86,两个第一皮带轮86之间绕接有平皮带87,导向架82中部安装有电动滑轨88,操作机构9安装在电动滑轨88上,马达84和电动滑轨88均与控制面板21电性连接;操作机构9包括有电动转盘91、电动推杆92、机械手93、三爪卡盘94、手术器具95和摄像头96,电动滑轨88上安装有电动转盘91,电动转盘91上均匀间隔地连接有三个电动推杆92,三个电动推杆92的伸缩杆上均通过螺栓连接的方式连接有机械手93,机械手93上连接有三爪卡盘94,三爪卡盘94上卡接有手术器具95,三爪卡盘94上通过螺钉连接的方式安装有摄像头96,电动转盘91、电动推杆92、机械手93和摄像头96均与控制面板21电性连接。
37.起初,弧形导杆4缩回弧形导轨3内,安装板6堵住台面2上的通孔,患者手术时,患者躺在台面2上,然后人工手动拉动弧形导杆4向上移动,安装板6从通孔内脱离,再把需要使用的手术器具95固定在三爪卡盘94上,操纵控制面板21操作马达84工作,马达84带动其上连接的驱动齿轮85转动,通过第一皮带轮86和平皮带87带动另一个驱动齿轮85转动,两个驱动齿轮85转动通过齿条83带动横导轨81水平移动,操作机构9随之移动,当操作机构9移动至合适位置后,通过控制面板21关闭马达84。通过控制面板21启动电动转盘91转动,将需要使用的手术器具95转动至电动转盘91的下部,人们通过玻璃板能够方便观察电动转盘91旋转的位置,然后通过控制面板21操作机械手93展开,通过控制面板21启动电动推杆92伸长,使得手术器具95往患者手术部位靠近,通过操作控制面板21操作机械手93进行手术,通过控制面板21开启摄像头96,摄像头96将画面传输至控制面板21上,便于医生操作本机器人,可当手术时需要向左或向右微调手术器具95时,通过控制面板21操作电动滑轨88移动,电动转盘91随之移动,即可实现对手术器具95的位置进行微调,需要调整手术器具95的前后位置时,拧松调节螺栓5,拉动弧形导杆4在弧形导轨3上移动,安装板6、移动机构8和操作机构9随之移动,调整好位置后,拧紧调节螺栓5将弧形导杆4固定即可,需要切换手术器具95时,通过控制面板21启动电动转盘91转动,使得需要使用的手术器具95朝下,然后通过控制面板21关闭电动转盘91。手术完毕后,将手术器具95从三爪卡盘94上拆卸,通过控制面板21控制机械手93、电动推杆92和电动滑轨88复位,然后通过控制面板21启动马达84带动横导轨81复位。再拧松调节螺栓5,将弧形导杆4缩回至弧形导轨3内,安装板6收纳至通孔内。将患者从台面2上移走即可。
38.实施例2
39.在实施例1的基础之上,如图3和图9所示,还包括有用于驱动弧形导杆4移动的驱动机构10,驱动机构10包括有轴承座101、转轴102、驱动轮103、减速电机104、第二皮带轮105和传动带106,操作台1内后侧壁上通过螺栓连接的方式安装有两个轴承座101,两个轴承座101呈左右对称设置,两个轴承座101之间转动式地连接有转轴102,转轴102的左右两端均通过键连接的方式连接有驱动轮103,驱动轮103外侧套设有橡胶环,橡胶环与弧形导
杆4内侧面接触,操作台1内底部后侧安装有减速电机104,减速电机104的输出轴上与转轴102中部均通过过盈连接的方式连接有第二皮带轮105,两个第二皮带轮105之间绕接有传动带106。
40.当弧形导杆4需要从弧形导轨3上升起时,启动减速电机104逆时针转动,通过第二皮带轮105和传动带106打动转轴102转动,驱动轮103随之转动,驱动轮103转动时通过摩擦力带动弧形导杆4向上移动,当弧形导轨3移动至合适位置后,关闭减速电机104。弧形导杆4需要缩回弧形导轨3内时,启动减速电机104顺时针转动,驱动轮103随之顺时针转动带动弧形导杆4向下移动缩回弧形导轨3内,然后关闭减速电机104。
41.如图3和图10和图11所示,还包括有调节手术患者位置的升降机构11,升降机构11包括有液压升降器111、床架112、头拖架113、气缸114和软垫115,操作台1内底部中间通过螺栓连接的方式安装有液压升降器111,液压升降器111的升降杆上通过连接架连接有床架112,台面2中部开有用于床架112活动的方形孔,床架112的右侧通过铰链连接的方式铰接连接有头拖架113,头拖架113底部与床架112底部右侧之间铰接安装有气缸114,床架112和头拖架113的顶部均通过粘接连接的方式连接有软垫115。
42.患者躺在软垫115上,通过床架112对人体进行支撑,头拖架113对人体头部进行支撑,根据手术需要可启动气缸114伸长能带动头拖架113向上倾斜,将人们头部垫高,启动气缸114缩短能够带动头拖架113下降。需要调整患者手术的高低位置时,启动液压升降器111带动床架112上升或下移,即可实现对手术患者的高低位置进行调节,当位置调节好后,关闭液压升降器111。
43.实施例3
44.在实施例2的基础之上,如图1、图2和图13所示,还包括有防止手术患者被外界干扰的防干扰机构12,防干扰机构12包括有支撑座121、转杆122、单向透视盖123和灯带124,操作台1的后端面上部焊接连接有支撑座121,支撑座121上转动式地连接有转杆122,转杆122的左右两侧均设有阻尼套,阻尼套位于支撑座121内侧,阻尼套用于提高支撑座121与转杆122之间的摩擦力,转杆122上固接有完全罩住台面2且只能从外侧透视内侧的单向透视盖123,单向透视盖123的下部周向均匀间隔地开有圆形透气孔,单向透视盖123内侧顶部均匀间隔地连接有对手术时提供照明的灯带124。
45.患者躺在软垫115上后,下拉单向透视盖123以转杆122为轴心逆时针旋转,可将单向透视盖123盖在操作台1顶部,此时患者无法透过单向透视盖123看到外部环境,避免患者受到外界干扰,医生可将透过单向透视盖123看到内部环境,然后将灯带124通电,灯带124发出光能够进行照明,透气孔可保证单向透视盖123内部与外界气体流通。手术结束后,关闭灯带124,将单向透视盖123打开,转杆122顺时针转动,当单向透视盖123旋转至90度时,松开单向透视盖123即可。
46.如图2、图3、图9、图10、图11、图12和图14所示,还包括有固定手术患者腿部的固定机构13,固定机构13包括有连接杆131、第一缸体132、n形活塞杆133、横板134、固定杆135、弧形夹板136、连杆137、第二缸体138、导液管139、l形活塞杆1310、复位弹簧1311和拨杆1312,床架112底部左侧竖直连接有连接杆131,连接杆131下端焊接连接有托板,托板顶部通过螺栓连接的方式连接有第一缸体132,第一缸体132内滑动式地连接有n形活塞杆133,n形活塞杆133的尾端通过焊接连接的方式连接有横板134,床架112左侧连接有两根固定杆
135,两根固定杆135前后对称设置,两根固定杆135上均转动式地连接有两块弧形夹板136,弧形夹板136内侧设有棉垫,弧形夹板136的底部均通过铆接连接的方式转动式地连接有连杆137,前侧的两根连杆137与横板134的前端铰接连接,后侧的两根连杆137与横板134的后端铰接连接,后侧的两根连杆137,床架112的后端面左部通过螺栓连接的方式连接有第二缸体138,第二缸体138后侧与第一缸体132底部之间通过卡箍连接的方式连接有软质导液管139,导液管139为波纹管,第二缸体138内侧滑动式地连接有l形活塞杆1310,l形活塞杆1310与第二缸体138内后壁之间连接有复位弹簧1311,转杆122的左端连接有驱动l形活塞杆1310移动的拨杆1312。
47.起初,第二缸体138和导液管139内充满液体,患者躺在软垫115上后,将双腿分别放置在前后两侧的弧形夹板136内侧,当下拉单向透视盖123以转杆122为轴心逆时针旋转时,拨杆1312随之转动,拨杆1312转动带动l形活塞杆1310向后移动,复位弹簧1311压缩,l形活塞杆1310向后移动将第二缸体138内的液体挤出,挤出的液体通过导液管139输送至第一缸体132内,第一缸体132内液体推动n形活塞杆133向上移动,横板134随之向上移动,通过连杆137带动同一侧的两块弧形夹板136逐渐相互靠拢,当单向透视盖123与操作台1闭合时,同一侧的两块弧形夹板136完全闭合,如此可将患者的腿部进行固定。打开单向透视盖123时,转杆122和拨杆1312顺时针转动,在复位弹簧1311的作用下带动l形活塞杆1310向前复位,第一缸体132内的液体被吸入第二缸体138内,n形活塞杆133、横板134和连杆137向下移动,同侧的两块弧形夹板136打开,松开患者腿部。
48.以上所述实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1