一种发型采集方法及其采集装置与流程
1.本发明涉及一种理发发型的数据采集,尤其是一种发型数据采集方法及其采集装置。
背景技术:
2.随着科技进步,自动化设备已经应用在工业及社会的方方面面,为人民生产生活带来了极大的方便。自动理发技术也进入了人们的研究领域,目前公开的自动理发技术中,多是采用3d扫描技术采集头皮轮廓数据,再通过软件处理数据,形成驱动理发机械臂的驱动数据,实现自动理发。这种技术虽然成熟,但实用性并不强,3d扫描获得的头皮轮廓数据是包含头发的轮廓数据,需要对数据进行二次处理,去掉头发保留头型,进而生成头型数据,然后根据头型生成形成驱动理发推子的数据。其中,要保证头型数据的准确,且要保证在头部的任何位置,刀头与头发始终处于正确的角度,还要保证所有的头发部位都要理到,相关软件的开发复杂、成本高;并且头型存在较大的差异,需要大量的基础数据,而对于头型不规则的情况,无法预知,数据通用性较差。另外3d扫描设备价格昂贵、使用和维护成本高,操作复杂。
技术实现要素:
3.为解决上述问题,本发明提供一种成本低、数据采集简单、易实现的一种发型采集方法,具体技术方案为:
4.一种发型数据采集方法,包括以下步骤:
5.s1、定位头部;
6.s2、建立三维坐标系,以颈椎为z轴,采用栅格覆盖头皮轮廓和/或头发轮廓,栅格交叉点为数据采样点;
7.s3、人工带动安装在机械臂上的电动推子沿头皮轮廓和/或头发轮廓的栅格线移动,在栅格线的交叉点采集头皮轮廓数据和/或头发轮廓数据,或通过机械臂自动带电动推子沿头皮轮廓和/或头发轮廓的栅格线移动,在栅格线的交叉点采集头皮轮廓数据和/或头发轮廓数据;
8.s4、计算头皮轮廓或头发轮廓的近似轮廓数据。
9.优选的,所述步骤s3中,所述机械臂的自由端装有触碰传感器和视觉传感器,先将触碰传感器移动到坐标原点,保存机械臂原点数据,然后根据视觉传感器控制机械臂的移动位置。
10.优选的,所述步骤s3中,从原点移动传感器至头皮或头发的任一位置并紧贴头皮或头发,保存机械臂的移动轨迹数据;
11.沿头发轮廓或头皮轮廓移动若干位置,并保存机械臂的移动轨迹数据。
12.优选的,所述步骤s4中,计算头皮轮廓或头发轮廓的近似轮廓数据包括以下方法:
13.沿格栅选相邻三点,将两两相邻点连成直线,与两直线中心点的垂直线的交叉点
即为圆心,以该圆心至三点的任一点为半径划弧连接三点,该弧为头皮轮廓或头发轮廓的近似轮廓。
14.进一步的,所述步骤s4中还包括精细化近似轮廓数据,所述精细化近似轮廓数据包括以下方法:
15.建立三维坐标系,以颈椎为z轴,与z轴垂直的平面为x、y平面,头皮轮廓或头发轮廓以栅格方式覆盖,栅格交叉点为数据采样点;
16.沿z轴取任意相邻三个栅格点a、b、c,与b相邻的最近两个点为f、g,五个点的坐标为已知,而a、b、c为相邻点,因此将连接这三点的头皮轮廓线用连接这三点的圆弧来近似,求出弧ab的中心点e的坐标数据。
17.其中,将a、e、b做为圆弧的已知三个坐标点,用上述方法得到弧ae中心点的坐标数据,依此类推可以得到更细粒度的头皮轮廓坐标数据或头发轮廓坐标数据。
18.优选的,e的坐标数据计算如下:
19.ab线段中点d(x4,y4,z4)的坐标为:
[0020][0021][0022]
其中,
[0023][0024][0025][0026][0027][0028]
联立三元二次方程组:
[0029][0030]
带入坐标:
[0031][0032]
令
[0033]
则方程组简化为:
[0034][0035]
代入已知坐标数据,解联立方程,
[0036]
得到e点坐标(x5,y5,z5),
[0037]
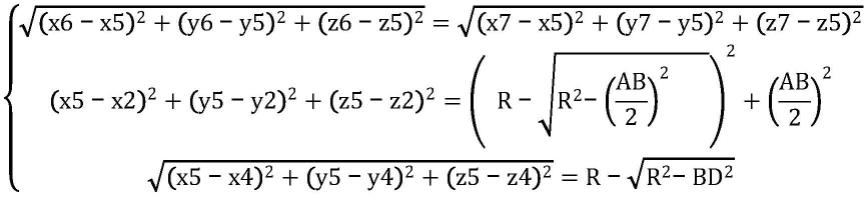
其中,五点坐标分别为a(x1,y1,z1),b(x2,y2,z2),c(x3,y3,z3),f(x6,y6,z6),g(x7,y7,z7),且|ab|=|bc|,|ef|=|eg|,
[0038]
经过a、b、c三点的圆弧的半径为r;线段ab=|ab|,bc=|bc|,ac=|ac|,bd=|bd|,de=|de|,ef=|ef|,eg=|eg|。
[0039]
发型采集装置,包括:机械臂;定位装置,所述定位装置位于机械臂的一侧,用于定位被采集者的头部;电动推子,所述电动推子安装在所述机械臂的工作端;视觉传感器,所述视觉传感器与被采集者的头部相对设置,且随机械臂工作端移动;触碰传感器,所述触碰传感器安装在所述机械臂的工作端,用于检测并反馈与头皮或头发的接触信号,得到位置信息;控制器,所述控制器与所述机械臂、所述电动推子、所述视觉传感器和所述触碰传感器电性连接,用于控制所述机械臂,并实时检测和保存所述机械臂的移动轨迹数据和位置数据;其中,所述视觉传感器反馈电动推子及触碰传感器与头部的相对位置信息。
[0040]
发型采集装置,包括:机械臂;定位装置,所述定位装置位于机械臂的一侧,用于定位被采集者的头部;电动推子,所述电动推子安装在所述机械臂的工作端;触碰传感器,所述触碰传感器安装在所述机械臂的工作端,用于检测并反馈与头皮或头发的接触信号,得到位置信息;控制器,所述控制器与所述机械臂、所述电动推子和所述触碰传感器电性连接,用于控制所述机械臂,并实时检测和保存所述机械臂的移动轨迹数据和位置数据。
[0041]
优选的,所述定位装置包括:定位架,所述定位架位于所述机械臂的一侧;鼻托,所述鼻托安装在所述定位架上,且与被测者的鼻梁相对设置,所述鼻托用于定位被采集者的鼻梁;及下巴托,所述下巴托安装在所述定位架上,且与被测者的下巴相对设置,所述下巴托用于定位被测者的下巴。
[0042]
与现有技术相比本发明具有以下有益效果:
[0043]
本发明提供的一种发型采集方法通过机械臂进行数据采集,采集若干交叉点实现头皮轮廓或头发轮廓的建立,数据采集和计算简单,软件开发容易,结构简单、成本低、数据采集方便。
附图说明
[0044]
图1是头皮或头发覆盖栅格线的示意图;
[0045]
图2是栅格线交叉点计算圆弧的示意图;
[0046]
图3是沿栅格线设置近似圆弧的示意图。
具体实施方式
[0047]
现结合附图对本发明作进一步说明。
[0048]
实施例一
[0049]
如图1至图3所示,一种发型采集方法,包括以下步骤:
[0050]
1.一种发型采集方法,其特征在于,包括以下步骤:
[0051]
s1、定位头部;
[0052]
s2、建立三维坐标系,以颈椎为z轴,采用栅格覆盖头皮轮廓和/或头发轮廓,栅格交叉点为数据采样点;所述机械臂的自由端装有触碰传感器和视觉传感器,先将触碰传感器移动到坐标原点,保存机械臂原点数据,然后根据视觉传感器控制机械臂的移动位置;
[0053]
s3、人工带动安装在机械臂上的电动推子沿头皮轮廓和/或头发轮廓的栅格线移动,在栅格线的交叉点采集头皮轮廓数据和/或头发轮廓数据,或通过机械臂自动带电动推子沿头皮轮廓和/或头发轮廓的栅格线移动,在栅格线的交叉点采集头皮轮廓数据和/或头发轮廓数据;从原点移动传感器至头皮或头发的任一位置并紧贴头皮或头发,保存机械臂的移动轨迹数据;
[0054]
沿头发轮廓或头皮轮廓移动若干位置,并保存机械臂的移动轨迹数据;
[0055]
s4、计算头皮轮廓或头发轮廓的近似轮廓数据。
[0056]
计算头皮轮廓或头发轮廓的近似轮廓数据包括以下方法:
[0057]
在格栅上选相邻三点,将两两相邻点连成直线,与两直线中心点的垂直线的交叉点即为圆心,以该圆心至三点的任一点为半径划弧连接三点,该弧即为头发轮廓或头皮轮廓的近似轮廓,将采样获得的间断轮廓坐标数据转换为更细粒度的轮廓坐标数据的算法如下:
[0058]
如图1、2、3所示,建立三维坐标系,以颈椎为z轴,与z轴垂直的平面为x、y平面,沿头部轮廓以栅格方式覆盖,栅格交叉点为数据采样点;
[0059]
如图所示,沿z轴取任意相邻三个栅格点a、b、c,与b相邻的最近两个点为f、g,该五个点的坐标为已知,因a、b、c为相邻点,故可将连接这三点的头发轮廓线用连接这三点的圆弧来近似,则弧ab中心点e的坐标计算如下:
[0060]
已知五点坐标分别为a(x1,y1,z1),b(x2,y2,z2),c(x3,y3,z3),f(x6,y6,z6),g(x7,y7,z7),且|ab|=|bc|,|ef|=|eg|,
[0061]
设经过a、b、c三点的圆弧的半径为r;线段ab=|ab|,bc=|bc|,ac=|ac|,bd=|bd|,de=|de|,ef=|ef|,eg=|eg|
[0062]
求:弧ab中心点e点坐标(x5,y5,z5)
[0063]
解:ab线段中点d(x4,y4,z4)的坐标为:
[0064][0065][0066]
其中,
[0067][0068][0069][0070]
[0071][0072]
联立三元二次方程组:
[0073][0074]
带入坐标:
[0075][0076]
令
[0077]
则方程组简化为:
[0078][0079]
代入已知坐标数据,解联立方程,可以得到e点坐标(x5,y5,z5),
[0080]
若要得到圆弧上的更细粒度的坐标,则再将a、e、b做为圆弧的已知三个坐标点,用上述方法得到弧ae中心点的坐标,其它以此类推。
[0081]
实施例二
[0082]
本实施例与实施例一的不同之处在于,操作人员手持电动推子沿头皮轮廓或头发轮廓移动,控制器记录位置信息和轨迹信息,并计算近似轮廓。此时,不需要视觉传感器,由人工操作电动推子实现数据的采集。
[0083]
理发时,对于同一个人,通过记录的位置信息和轨迹信息重复电动推子的路径和位置,完成自动理发。
[0084]
实施例三
[0085]
一种发型采集装置,包括机械臂、电动推子、视觉传感器、控制器、触碰传感器和定位装置,机械臂、电动推子、视觉传感器和触碰传感器均与控制器电性连接,电动推子安装在机械臂的工作端,视觉传感器安装在电动推子或机械臂的工作端,触碰传感器安装在机械臂的工作端或电动推子上,触碰传感器用于检测反馈头皮接触信号和/或头发接触信号;摄像头用于识别头皮轮廓或头发轮廓;控制器用于控制机械臂,并实时检测和保存机械臂的移动轨迹数据和位置数据;定位装置包括定位架、鼻托和下巴托,定位架位于机械臂的一侧;鼻托安装在定位架上,且与被测者的鼻梁相对设置,鼻托用于定位被采集者的鼻梁;下巴托安装在定位架上,且与被测者的下巴相对设置,下巴托用于定位被测者的下巴。
[0086]
传感器包括梳妆压力传感器和/或平板状压力传感器,其中,所述平板状压力传感器的边缘为圆弧形。
[0087]
视觉传感器可以为摄像头。
[0088]
1、头型数据采集方法
[0089]
通过控制软件驱动安装在多轴机械臂刀头的头皮触碰传感器沿头皮轮廓经纬线紧贴头皮移动,在经纬线的交叉点采集头皮轮廓数据。多轴机械臂刀头顶部安装头皮触碰传感器和摄像头,摄像头始终对准头皮方向,触碰传感器设计为梳状压力传感器,其与头皮接触面为圆弧形。通过图像识别软件识别摄像头的头部图像数据,指导多轴机械臂刀头只采集头发覆盖的头型数据并避开耳朵。具体数据采集步骤为:
[0090]
a、移动传感器到参考点,保存该点位置数据;
[0091]
b、不接触头皮及耳朵下移动传感器到头部一侧的头发最下端,将传感器紧贴头皮,保存移动轨迹数据;
[0092]
c、移动传感器紧贴头皮沿经线到采集软件设定的头部任意位置,并沿途在软件设定的与纬线的所有交叉点采集数据;
[0093]
d、不接触头皮及耳朵下沿经线移动传感器到头发最下端,并沿纬线移动一段软件设定的距离,将传感器紧贴头皮,保存移动轨迹数据;
[0094]
e、重复c和d的步骤,直到头部另一侧。
[0095]
2、发型数据采集方法
[0096]
通过控制软件驱动安装在多轴机械臂刀头的头发触碰传感器沿头发轮廓经纬线紧贴头皮移动,在经纬线的交叉点采集头发轮廓数据。多轴机械臂刀头顶部安装头发触碰传感器和摄像头,摄像头始终对准头皮方向,触碰传感器设计为平板状压力传感器,其平板边缘设计为圆弧形,当传感器平板面接触头发时反馈触发信号。通过图像识别软件识别摄像头的头发图像数据,指导多轴机械臂刀头只采集头发覆盖部分的发型数据并避开耳朵。具体数据采集步骤为:
[0097]
a、移动传感器到参考点,保存该点位置数据;
[0098]
b、不接触头发及耳朵下移动传感器到头部一侧的头发最下端,将传感器紧贴头发,保存移动轨迹数据;
[0099]
c、移动传感器紧贴头发沿经线到采集软件设定的头部头发的任意位置,并沿途在软件设定的与纬线的所有交叉点采集数据;
[0100]
d、不接触头发及耳朵下沿经线移动传感器到头发最下端,并沿纬线移动一段软件设定的距离,将传感器紧贴头发,保存移动轨迹数据;
[0101]
e、重复c和d的步骤,直到头部另一侧。
[0102]
以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1