一种用于下肢减重训练的辅助装置的制作方法
1.本发明涉及医疗康复器械领域,具体涉及一种用于下肢减重训练的辅助装置。
背景技术:
2.步行是人们日常生活中最基本的功能活动之一,据统计,患有致残的神经系统疾病的患者如脑卒中、脊髓损伤、外伤、格林
‑
巴利等病后,三年能恢复独立行走50m的患者仅有3%~10%。对许多因各种原因导致暂时不能行走的患者来说,恢复步行是他们的第一愿望,也是康复医学研究的一个重要内容。减重步行训练是针对下肢功能障碍、改善步行能力的一种新的康复治疗技术。
3.然而传统步行运动治疗强调诱发下肢关节分离运动,单独训练迈步、平衡、重心转移等分解动作。但真实步行环境与此不同,结果常导致患者分离运动好,步行能力差的矛盾现象。市场上现有的产品分类较多,有康复踏车、坐卧式康复机器人、固定式外骨骼机器人、减重跑台训练机器人及下肢智能反馈训练系统等产品。但是存在的问题有:a.康复踏车没有减重系统,结构不能做负重训练,运动轨迹为圆型,对早期需要保持关节活动度的患者来说,运动轨迹较为危险。
4.b.坐卧式康复机器人没有减重系统,不能做负重训练,运动轨迹可自由设定,但适用范围不广,成本高。
5.c.固定式外骨骼机器人和减重跑台训练机器人不能对昏迷的患者进行早期训练。
6.d.下肢智能反馈训练系统为床类康复产品,针对康复所有阶段的患者,能够进行卧姿和站姿训练,可以进行减重训练。市场上对于脚部装置的设计只具备缓冲和踝关节角度调节功能。
技术实现要素:
7.本发明为解决下肢康复训练设备中难以对患者进行减重步行训练的问题,提供一种用于下肢减重训练的辅助装置。
8.为了实现上述目的,本发明的技术方案是:一种用于下肢减重训练的辅助装置,包括底座和脚板,所述底座上设置有称重机构,所述称重机构通过弹簧连接有固定台,所述固定台与底座滑动连接,固定台上转动连接所述脚板。
9.进一步地,所述称重机构包括重力传感器和称重杆,所述重力传感器通过固定块固定设置在底座上,所述称重杆呈
“┴”ꢀ
形结构,称重杆的竖直段穿过固定块连接所述重力传感器,称重杆的水平段固定连接所述弹簧。
10.进一步地,所述固定台的一端开设有球形凹槽,固定台在对应球形凹槽的中部设置有安装柱环,球形凹槽内设置有球形支架,球形支架的两端分别开设有一大一小的通孔,球形支架上连接所述脚板,球形支架内设置有压环,所述压环的中部设置有与安装柱环相匹配的柱形凸台,固定台上设置有螺栓,所述螺栓穿过安装柱环与压环的柱形凸台螺纹连
接。
11.进一步地,所述球形支架与球形凹槽之间设置有球形防滑瓦,所述球形防滑瓦的中部开设有与安装柱环相匹配的安装孔,所述球形支架的通孔直径大于球形防滑瓦的安装孔直径。
12.进一步地,所述螺栓的端部伸出压环设置有开口销。
13.进一步地,所述螺栓的头部设置有旋转手轮。
14.进一步地,所述球形支架上固定连接有平板,所述平板的一端铰接脚板、另一端设置有减震橡胶。
15.进一步地,所述固定台的另一端通过连接板可拆卸连接有滑块,所述底座上设置有与滑块相匹配的滑轨,所述滑轨位于称重机构的下方,所述弹簧连接所述连接板。
16.进一步地,所述底座上设置有橡胶块,所述橡胶块位于滑轨的下端、与连接板相对应。
17.通过上述技术方案,本发明的有益效果为:1.本发明结构简单轻巧,造价低,适用范围广,卧姿和站姿都可以适用;配合弹簧减重,可以使肌力在0
‑
3级的患者都能适用;也可以配合能够给膝关节提供动力的产品,进行被动训练。
18.2.本发明采用直线滑轨配合滑块约束患者运动路线,患者在减重吊带的辅助下进行踏步训练。装置本身不带动力,通过重力传感器记录本装置对患者的实际承重,根据患者的恢复情况可以制定不同的减重比例训练。弹簧可减轻踏步运动过程中身体重量对足底的冲击,同时给患者以反作用力,让训练更轻松,增强患者恢复信心。重力传感器通过双腿重力变化的时间间隔,可以计算出患者的踏步步幅;重力传感器通过单腿重力变化的大小,可以分析出患者的单腿恢复情况。此外,重力传感器还可以给其他设备输出重力参数,可参与设备的互动游戏参数,结合游戏训练,使患者得到更好的服务及康复体验。
19.3.本发明通过螺栓和压环将球形支架、球形防滑瓦与固定台装配为一体,将球形支架与脚板分体铰接,增加了踝关节的训练模式,脚部可以进行前屈、后伸、外翻、内收及旋转的运动。可通过旋转手轮拧动螺栓,从而调节环形支架的运动阻力和角度,以使本装置能够适应不同阶段的患者。
附图说明
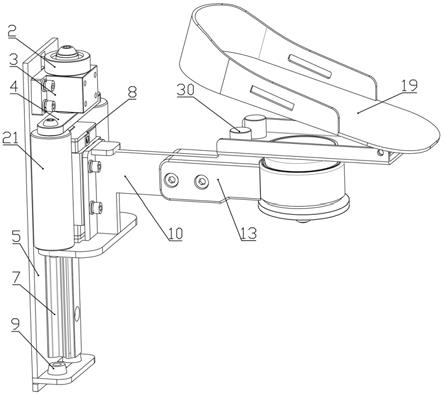
20.图1是本发明一种用于下肢减重训练的辅助装置的结构示意图之一;图2是本发明一种用于下肢减重训练的辅助装置的结构示意图之二;图3是本发明图2的剖视结构示意图;图4是本发明一种用于下肢减重训练的辅助装置的结构示意图之三;图5是本发明固定台的结构示意图;图6是本发明固定台、球形防滑瓦和球形支架的结构示意图。
21.附图中标号为:2为重力传感器,3为固定块,4为称重杆,5为底座,7为滑轨,8为滑块,9为橡胶块,10为连接板,11为旋转手轮,12为螺栓,13为固定台,1301为安装柱环,1302为球形凹槽,14为球形防滑瓦,15为压环,16为球形支架,1601为平板,18为开口销,19为脚板,20为减震橡胶,21为弹簧。
具体实施方式
22.下面结合附图和具体实施方式对本发明作进一步说明:在本发明的描述中,需要理解的是,术语“左”、“右”、“上”、“下”、“横向”“竖向”等指示的方位或位置关系为基于附图1所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
23.如图1~图6所示,本实施例提供一种用于下肢减重训练的辅助装置,包括底座5和脚板19,所述底座5上设置有称重机构,所述称重机构通过弹簧21连接有固定台13,所述固定台13与底座5滑动连接,固定台13上转动连接所述脚板19。本装置本身不带动力,竖直放置时,患者可在减重吊带装置的辅助下进行踏步训练通过称重机构记录本装置对患者的实际承重,根据患者的恢复情况可以制定不同的减重比例训练。弹簧21的设置可减轻踏步运动过程中身体重量对足底的冲击,同时给患者以反作用力,让训练更轻松,增强患者恢复信心。并且通过称重机构记录的通过双腿重力变化的时间间隔,可以计算出患者的踏步步幅;称重机构通过单腿重力变化的大小,可以分析出患者的单腿恢复情况。
24.具体的,所述称重机构包括重力传感器2和称重杆4,所述重力传感器2通过固定块3固定设置在底座5上,所述称重杆4呈
“┴”ꢀ
形结构,称重杆4的竖直段穿过固定块3连接所述重力传感器2,称重杆4的水平段固定连接所述弹簧21,本实施例中,弹簧21的数量为两个,两个弹簧21分别位于称重杆4的水平段的两端。患者踩在脚板19上,向上或者向下运动时,重力传感器2可以记录出患者双腿的重力变化时间计算出步幅,并通过双腿的重力变化对比计算出单腿的恢复情况。
25.进一步地,所述固定台13的一端开设有球形凹槽1302,固定台13在对应球形凹槽1302的中部设置有安装柱环1301,球形凹槽1302内设置有球形支架16,球形支架16的两端分别开设有一大一小的通孔,球形支架16上连接所述脚板19,球形支架16内设置有压环15,所述压环15的中部设置有与安装柱环1301相匹配的柱形凸台,固定台13上设置有螺栓12,所述螺栓12穿过安装柱环1301与压环15的柱形凸台螺纹连接。通过螺栓12和压环15将球形支架16与固定台13装配为一体,球形支架16可以旋转,从而使脚板19可以旋转、偏转和侧翻。
26.进一步地,所述球形支架16与球形凹槽1302之间设置有球形防滑瓦14,所述球形防滑瓦14的中部开设有与安装柱环1301相匹配的安装孔,所述球形支架16的通孔直径大于球形防滑瓦14的安装孔直径。通过球形防滑瓦14保证球形支架16具有一定的运动摩擦力,提高使用安全性及舒适度。
27.进一步地,所述螺栓12的端部伸出压环15设置有开口销18。所述螺栓12的头部设置有旋转手轮11。通过转动旋转手轮11,带动螺栓12与压板17的螺纹连接强度,从而调整压板17对球形支架16和球形防滑瓦14的挤压力,从而调整球形防滑瓦14保证球形支架16的运动阻力,从而调节患者在进行脚部训练时的强度;同时,在转动旋转手轮11时,可以通过控制脚板19来调节球形支架16的放置状态,即调整球形支架16上端面与压板17之间形成的角度,继而实现对脚板19初始角度的调节,从而可以使患者着重训练某种脚踝的旋转运动。
28.进一步地,所述球形支架16上固定连接有平板1601,所述平板1601的一端铰接脚板19、另一端设置有减震橡胶20。当患者脚部带动脚板19向上抬起或下压时,通过减震橡胶
20减少脚部受力、形成缓冲力。
29.进一步地,所述固定台13的另一端通过连接板10可拆卸连接有滑块8,所述底座5上设置有与滑块8相匹配的滑轨7,所述滑轨7位于称重机构的下方,两个所述弹簧21位于滑轨7的两侧,弹簧21的下单连接所述连接板10。通过滑轨7和滑块8的设置,使本装置的使用更安全可靠。
30.进一步地,所述底座5上设置有橡胶块9,所述橡胶块9位于滑轨7的下端、与连接板10相对应,脚板19下降到最下端时,通过橡胶块9对进行脚板19进行减震、形成缓冲。
31.本装置的使用:1.本装置水平放置时,如图3所示的放置状态,主要面向康复初期的患者,不需要减重系统,患者以平躺的状态使用本装置,本装置可固定在床上放置腿部的位置处,使用两个本装置对双腿进行训练,患者将脚放置在脚板19上,主要以简单的踏步训练为主,主要功能是提升肌力,保持关节活动度,促进自主运动形成。
32.2.本装置竖直放置时,如图4所示的放置状态,可以面向康复中期和后期的患者,这个时期的患者,主动活动能力增强,出现选择性肌肉活动,可以开展不同屈膝位的主动伸、屈膝运动和踝关节背身运动。这个阶段的患者负重能力不强,需要一定的减重系统进行辅助,如减重吊带装置,患者上半身通过减重吊带装置进行主要支撑,患者的脚部放置在脚板19上。当患者脚部带动脚板19向下运动时,与减震橡胶20接触后,形成减少脚部缓冲力,这是第一次缓冲,然后带动连接板10继续向下移动,弹簧21减少身体的冲击力,这是形成的第二次缓冲,同时重力传感器2记录患者脚部施加压力的参数值。当患者脚部抬起时,带动脚板19向上时,弹簧21对患者施加向上的推力,辅助患者完成踏步动作,同时重力传感器2记录患者脚部压力的变化值。在抬腿上下运动时,即脚板19向上或者向下运动时,重力传感器2可以记录出患者腿的重力变化时间计算出步幅,并通过双腿的重力变化对比计算出单腿的恢复情况。并且,在抬腿时运动,将脚板19和球形支架16分体的设计,踝关节可以进行训练,抬腿运动时,让滑动装置的重量对踝关节的约束力减少到最小。
33.3.本装置也可以与能够为膝关节提供运动动力的产品行配合,进行被动训练。
34.以上所述之实施例,只是本发明的较佳实施例而已,并非限制本发明的实施范围,故凡依本发明专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本发明申请专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1