施工设备的制作方法
1.本发明涉及一种施工设备,具体涉及一种全电动施工设备。
2.本发明适用于工业施工机械或施工设备领域中的工程机械,特别是挖掘机和铰接式运输车。虽然将主要针对挖掘机来描述本发明,但本发明不限于这种特定机械,而是还可用在其他工程机械中,例如铰接式运输车、自卸卡车和反铲装载机、装载机、滑移装载机,只要它配备有线性缸来驱动该设备的运动即可。
背景技术:
3.近年来,已经存在车辆电气化的明显趋势,并因此不再使用导致温室气体排放的化石燃料。电动车辆还具有比其相应的热能车辆更安静的优点。
4.这种趋势现在正在蔓延到施工机械,迄今为止,施工机械已经包括驱动液压泵的内燃机。内燃机将逐渐被电动机替换。也存在替代液压系统和组成该液压系统的各种缸的解决方案。如今,解决方案主要包括用电动缸代替液压缸。然而,在实践中,这会带来许多问题,包括体积大、暴露于冲击,并且最重要的是由感应力导致的潜在的不可逆变形或磨损,甚至是损坏。
5.众所周知,在某些操作(例如挖掘或倾倒阶段)期间,相对大的力被施加在线性致动器的轴线上。传统上,即,在液压缸的情况下,使用安全阀形式的压力限制器,它允许排出容纳在缸内的一部分油,从而限制在缸体和杆件上引起的机械应力。然而,据申请人所知,迄今为止还没有人用性能类似于液压缸性能的电动缸成功解决这个问题。
6.us 2018 287458 a提出了一种电动缸的原始设计,其中,电动机被容纳在缸杆件的内部。该电动机驱动螺纹毂,该螺纹毂接合在形成缸体的缸内。虽然这种电动致动器的设计比较新颖,但不能确定它解决了与感应力相关的变形或损坏的问题,并且上述易损的电动缸仍暴露于潜在的外部冲击。
7.另一方面,cn110984263提出了一种电动挖掘机,其中,液压缸被电动致动器替换,该电动致动器包括电动机,该电动机通过蜗轮蜗杆驱动致动杆,该致动杆包括附接到涡轮的第一端以及附接到挖掘机的运动部分(例如铰接臂的一个区段)的第二端。
8.在另一注册专利中,cn110528606a公开了一种挖掘机,其中,柱被安装在升降平台上。该升降平台借助于剪刀机构竖直地移动,该剪刀机构由电动致动器驱动。该致动器包括驱动螺纹杆旋转的电动机,该螺纹杆穿过由滑架限定的螺纹孔。该螺纹杆绕其轴线的旋转导致沿该螺纹杆的轴线的平移运动。所述剪刀机构的一个棒被铰接在滑架上,从而该滑架的运动使所述平台在竖直方向上移动。
9.最后,cn 208395875 u公开了一种用于对基础支柱的地点进行挖掘的岩土工程系统。
技术实现要素:
10.本发明的目的是提供一种简单、有效、稳健且经济的解决方案,以用电动致动器替
换施工设备的液压缸。详细地,通过将所述致动器集成在设备内,为装配所述致动器的部件和采用合适的尺寸提供了很大的可能性。这种解决方案将使得在市场上推出全电动的施工设备成为可能。
11.该目的通过根据本发明的施工设备来实现,该施工设备包括至少一个电动致动器,该电动致动器包括:
[0012]-杆件,该杆件沿着纵向轴线延伸;
[0013]-滑动构件,该滑动构件能够沿着所述杆件移动;
[0014]-电动机,该电动机用于将电力转换成所述滑动构件沿着所述纵向轴线的移动;
[0015]-连接杆,该连接杆包括第一端和第二端,该第一端被铰接在所述滑动构件上,该第二端被铰接在施工设备的第一元件上,以便使第一元件相对于第二元件移动或相反地使第二元件相对于第一元件移动;以及
[0016]-引导装置,该引导装置用于引导所述滑动构件沿着所述纵向轴线的移动。
[0017]
根据本发明,至少所述电动机、所述杆件和所述滑动构件被集成到该施工设备的所述第二元件中。
[0018]
有利地,所述引导装置相对于第二元件被固定或与所述第二元件成一体。
[0019]
根据本发明的施工设备所配备的电动致动器由其性能、耐用性和效率过去在已经得到证实的“现成的”简单元件构成。此外,所述引导装置以及将致动器的敏感元件集成到施工设备中能够在稳健性、耐用性和效率方面实现非常有希望的结果。
[0020]
此外,由于使用了电动机,能够在驱动运动期间(通常在挖掘机动臂在重力作用下向下移动时)通过用作发电机的所述电动机来应用能量回收。
[0021]
有利地,本发明的施工设备包括以下(可选的)特征:
[0022]-所述滑动构件和所述杆件形成螺旋联接。
[0023]-所述螺旋联接是使用滚珠丝杠或滚柱丝杠机构实现的。
[0024]-所述滑动构件和所述杆件形成滑动联接。
[0025]-所述电动机是线性电动机,其包括作为转子的滑动构件和作为定子的所述杆件。
[0026]-所述第二元件限定有开口,通常是狭槽,用于供所述连接杆穿过。
[0027]-所述第二元件是所述施工设备的金属结构的一部分。
[0028]-所述施工设备还包括静态制动器,以在电力被从所述电动机移除时将所述滑动构件保持在位。
[0029]-所述连接杆的第一端和第二端均围绕与所述纵向轴线垂直的枢转轴线被铰接。
[0030]-所述施工设备的所述第二元件确保对所述滑动构件的引导。这意味着用作引导装置的是所述设备的第二元件。
[0031]-所述引导装置包括延伸穿过所述滑动构件的孔的至少一个导轨。
附图说明
[0032]
参考附图,下面是作为示例引用的本发明的实施例的更详细描述。
[0033]
在这些图中:
[0034]
图1是根据本发明的施工设备(例如挖掘机)的透视图;
[0035]
图2是挖掘机臂的侧视图,该挖掘机臂包括动臂、斗杆和铲斗;
[0036]
图3是根据本发明的第一实施例的挖掘机动臂的局部详细视图;
[0037]
图4是根据本发明的第二实施例的挖掘机动臂的局部详细视图;
[0038]
图5是图4的放大图;
[0039]
图6和图7是与图3和图4的视图类似的视图,示出了本发明的第三实施例;
[0040]
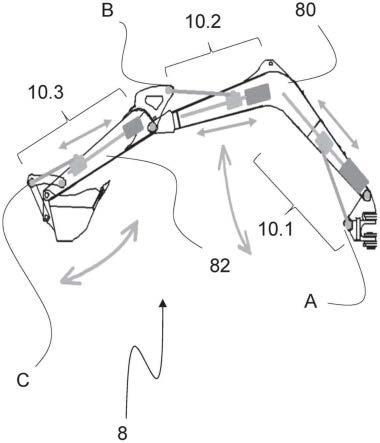
图8示出了本发明的另一种可能的应用,根据该应用,相同的致动器机构可以用于致动挖掘机配件或附件,特别是拇指夹(thumb);
[0041]
图9示出了本发明在自卸车上的另一种可能的应用。
[0042]
图10示出了本发明的第四实施例;
[0043]
图11和图12是示出本发明的第五实施例的示意图;并且
[0044]
图13是示出本发明的第六实施例的示意图。
具体实施方式
[0045]
图1示出了施工设备2(也称为“施工机械”或“工程机械”),其在本示例中是挖掘机。显然,并且如上文所提到的,本发明不限于这种特定示例,因为它可以应用于任何其他施工机械。
[0046]
施工机械2包括能围绕竖直轴线枢转的上框架(也称为“平台”)4。上框架4包括驾驶室。驾驶室被可旋转地安装在下框架上,该下框架配备有一对环形履带6(例如,卡特皮勒履带6)。
[0047]
挖掘机2还包括挖掘机臂8,该挖掘机臂8包括可相对于上框架4旋转的动臂80和可相对于动臂80旋转的斗杆82(也称为“铲斗杆(stick)”或“铲斗臂(arm)”)。此外,工具83(例如铲斗)被可移除地附接到斗杆82的端部。
[0048]
参考图1、图4和图5,附图标记84表示动臂80与上框架4之间的铰接件(或铰链),附图标记86表示动臂80与斗杆82之间的铰接件(或铰链),并且附图标记88表示工具83与斗杆82之间的铰接件(参见图1)。
[0049]
作为一般规则,并且根据适用的标准,图中的虚线表示的轴线是旋转运动的轴线。未对其添加附图标记,以避免使附图过于复杂。
[0050]
以已知的方式,铰接件84、86和88允许使动臂80、斗杆84或工具83围绕与地面平行的旋转轴线旋转。因此,当该施工设备放置在平坦表面上时,所述旋转轴线是水平的。然而,在变型例中,有些施工设备包括联接到致动器的铰接件,其旋转轴线不平行于地面。
[0051]
在本示例中,动臂80是角状的,这意味着它包括两个直线区段,这两个直线区段之间限定有约120
°
的夹角。
[0052]
施工机械2的特殊之处在于它是完全电动的。换句话说,施工机械2既没有热能发动机,也没有液压装置。环形履带6由至少两个电动机(未示出)驱动,每个履带6分别有一个,并且挖掘机臂8和工具83的移动是通过电动致动器实现的,所述电动致动器分别是图2中的三个电动致动器10.1、10.2和10.3,其特性在下面详细描述。
[0053]
每个致动器包括沿着纵向轴线x12延伸的杆件12和能够沿着杆件12移动的滑动元件14(也可称为“滑架”)。
[0054]
每个致动器还包括电动机16,该电动机16用于将电能转换成滑动元件14沿着纵向轴线x12的移动。例如,电能可以由可充电的车载电池组(未示出)、例如锂离子电池组供应。
[0055]
电动机16优选是直流电动机,例如无刷直流电动机(bldc)。然而,在变型例中,它也可以是交流电动机。
[0056]
每个致动器还包括连接杆18,该连接杆18包括第一端18a和第二端18b,该第一端18a围绕与纵向轴线x12垂直的枢转轴线被铰接到滑动元件14,该第二端18b被铰接到施工机械2的第一元件。
[0057]
在图1和图2的实施例中,挖掘机2包括用于使动臂80移动的第一致动器10.1,因此,其连接杆的第二端18b附接到所述平台/上框架4的铰链a。挖掘机2还包括:第二致动器10.2,该第二致动器10.2用于使斗杆82移动,因此,其连接杆的第二端18b附接到斗杆82的铰链b;以及第三致动器10.3,该第三致动器10.3用于使工具83移动,因此,其连接杆的第二端18b附接到工具83的铰链c。
[0058]
因此,在图1和图2的实施例中,所述第一元件可以是上框架4、斗杆82或工具83。
[0059]
在图2的示例中,与连接杆18的第二端18b附接的铰链b和c是要致动的元件的一部分,而铰链a属于另一元件,即上框架4。
[0060]
有利地,至少电动机16、杆件12和滑动构件14被集成在一起,然后被受保护地内置在该施工设备的第二元件(例如动臂80或斗杆82)中。因此,所述杆件的轴线x12相对于所述第二元件是固定的/不动的。更准确地说,杆件12相对于第二元件的唯一自由度是围绕杆件12自身的轴线x12旋转。
[0061]
优选地,所述第二元件是施工设备2的金属结构的一部分。正如其名称所示,该金属结构或骨架是构成施工设备2的框架的金属件的组件。
[0062]
例如,上框架4和挖掘机臂8是施工设备2的金属结构的一部分。基本上,该金属结构可以由结合在一起的金属片材形成。
[0063]
此外,为了避免任何混淆或误解,显而易见的是,上文所称的施工设备的第一元件和第二元件是两个不同的元件,这意味着它们不是同一个元件。
[0064]
在图1和图2的实施例中,致动器10.1和10.2的元件12、14和16被集成到作为第二元件的动臂80中,并且致动器10.3的元件12、14和16被集成到作为第二元件的斗杆82中。
[0065]
表述“被集成到”是指每个致动器的元件12、14和16被容纳或包封在一种保护罩内,该保护罩实际上是所述机械框架的一部分。
[0066]
有利地,所述第二元件80或82限定有狭槽形式的开口26,该开口26在与杆件12的方向平行的方向上延伸,以允许所述连接杆18穿过。在图3中特别可以看到该开口26。
[0067]
在挖掘机的示例中,动臂80和斗杆82传统上由钢板制成,可能与铸造零件相关联,其限定有未利用的中空体积。因此,本文的构思是使用该未利用的中空体积来至少容纳所述电动机16、滑架14和杆件12,以便保护这些元件免受冲击。因此,可以理解的是,在结构上,根据本发明的可被描述为“100%电动”的挖掘机2的骨架类似于传统液压挖掘机的骨架,除了形成有开口(例如开口26)以允许连接杆18穿过之外。
[0068]
每个致动器还包括引导装置以引导所述滑动元件14沿着纵向轴线x12的移动。这些引导装置可以采取多种形式,包括图3所示的形式,其中,实际上由上文所称的第二元件80或82提供引导。具体地,滑动元件14具有与所述第二元件80或82的横截面大致相同的横截面,使得实现了基本的引导。
[0069]
在图3所示的示例中,滑动元件14和杆件12形成螺旋联接(参见https://
www.wikimeca.org/index.php/liaison_h%c3%a9lico%c3%afdale)。该螺旋联接或螺旋连接是通过两个螺旋表面之间的接触实现的。
[0070]
例如,该螺旋联接是通过使用滚珠丝杠或滚柱丝杠机构(未示出)实现的。该机构的原理是使用滚动元件(例如滚珠或滚柱)来限制杆件12与滑动元件14之间的摩擦。由于这种类型的螺旋连接在现有技术中是众所周知的,因此这里不再给出详述。互联网上有很多关于该主题的信息,例如在以下互联网页面上(其内容通过引用的方式并入本文):
[0071]-https://en.wikipedia.org/wiki/roller_screw;
[0072]-https://en.wikipedia.org/wiki/ball_screw。
[0073]
参考图3,当电动机16被接通(即,被供电)时,它驱动杆件12围绕轴线x12旋转,如箭头r1所示。由于所述螺旋联接,杆件12的旋转导致滑架14沿着杆件12向前或向后平移(参见箭头d1),这取决于电动机16的旋转方向。结果,连接杆18绕铰链a枢转并迫使动臂80围绕动臂80与上框架4之间的铰接件84旋转(参见箭头r2)。因此,电动致动器10.1形成一种简单的装置,以根据电动机16的旋转方向而使动臂80向上或向下移动。
[0074]
通常,滑动元件14与连接杆18之间的铰接件的轴线平行于连接杆18与上文所称的施工设备的所述第一元件(例如,上框架4、斗杆84或工具83)之间的铰接件的轴线。而且,可以注意到,设置在连接杆18的端部18a和18b处的铰接件的轴线平行于挖掘机2的铰接件84、86和88的轴线。
[0075]
根据未示出的变型例,滑动元件/滑架14被固定/紧固到上文所称的滚珠丝杠或滚柱丝杠机构的外部主体(也称为“螺母”或“螺母元件”),以便限制传递到滚珠/滚柱丝杠机构的作用力。这意味着所述滑动元件本身不是滚珠/滚柱丝杠机构的一部分。通常,滑动元件14可以使用常规紧固件(例如铆钉、螺钉或螺栓)被紧固到滚珠/滚柱丝杠机构的螺母元件。
[0076]
图4和图5示出了本发明的第二实施例。为了简洁起见,下文仅提及与第一实施例的区别。
[0077]
在该第二实施例中,与第一实施例的主要区别在于电动机16构成所述滑架/滑动元件,即,电动机16沿着杆件12滑动。具体地,电动机16包括中空转子,该中空转子通过无摩擦传动系统(例如滚珠丝杠或滚柱丝杠系统)与杆件12接合。因此,电动机16的转子具有“螺母”功能,引号表示它不是传统意义上的螺母。在本实施例中,与第一实施例相反,杆件12围绕其纵向轴线x12的旋转被固定。
[0078]
而且,在该第二实施例中,由至少一个导轨(优选两个导轨24)提供平移引导,所述至少一个导轨24平行于杆件12延伸,并且每一个均被接合在作为滑动元件的所述电动机的孔中。准确地说,这些导轨中的每一个均通过相应的孔接合,该孔延伸穿过支撑电动机16的两个支架。
[0079]
在本示例中,每个导轨是具有圆形横截面的柱体,但显而易见的是,可替代地,该柱体的横截面可以与此不同,例如是矩形的。
[0080]
参考图4和图5,当电动机16被接通(即,被供电)时,该电动机的转子16.1被围绕轴线x12旋转驱动。由于所述螺旋联接,并且由于杆件12的旋转在本实施例中被固定,所以同时实现了转子16.1的旋转和沿着杆件12的平移。转子16.1驱动定子16.2沿着该杆件平移。换句话说,随着转子16.1围绕轴线x12旋转,电动机16沿着杆件12来回移动(参见箭头d1),
这取决于电动机16的旋转方向。结果,连接杆18绕铰链a枢转并且迫使动臂80围绕动臂80与上框架4之间的铰接件84旋转(参见箭头r2)。因此,电动致动器10.1形成一种简单的装置,以根据电动机16的旋转方向而使动臂80向上或向下移动。
[0081]
图6和图7示出了本发明的第三实施例。为了简洁起见,下文仅提及与前两个实施例的区别。
[0082]
在该第三实施例中,滑动元件14和杆件12以滑动连接的方式彼此连接。在本示例中,电动机16是具有转子14和定子12的线性电动机,该转子14形成所述滑动元件,该定子12形成所述杆件。
[0083]
例如,在以下网页https://en.wikipedia.org/wiki/linear_motor上描述了通常的线性电动机,该网页的内容通过引用的方式并入本文。
[0084]
而且,在该第三实施例中,杆件12采用导轨的形式,其横截面与工字梁的横截面相当,但不对称。滑架14具有互补的横截面,使得滑架14自然被引导而沿着杆件12平移。因此,导轨12在滑动元件14的凹槽内延伸,所述凹槽具有互补的形状。
[0085]
参考图6和图7,当电动机16被接通(即,被供电)时,所述滑架(例如,转子)沿着作为定子工作的杆件12被平移驱动。换句话说,所述滑架根据传输到电动机16的控制信号而沿着杆件12来回移动(参见箭头d1)。结果,连接杆18绕铰链a枢转并且迫使动臂80围绕动臂80与上框架4之间的铰接件84旋转(参见箭头r2)。因此,电动致动器10.1形成一种简单装置,以使动臂80向上或向下移动。
[0086]
图8示出了本发明的变型例,其中,致动器10用于移动该施工机械上的配件(或附件),在这种情况下是拇指夹87。通常,拇指夹使得更容易拾取、保持并移动不适合装入铲斗83中的难处理材料,例如岩石、混凝土、树枝和碎屑。
[0087]
在本实施例中,与之前的实施例相反,所述保护壳是紧固到机械2的箱体85,这意味着保护壳85是可以事后装配的东西。在本示例中,保护壳85附接在斗杆82下方。因此,电动机16、杆件12和滑动元件14被容纳在该可移除箱体85内,这也满足了对滑架14的引导功能。
[0088]
通常,该保护壳85可以容易地从机械2上拆下。例如,该箱体可以用螺栓连接在动臂80或斗杆82下方。这种构造的优点在于它便于对电动机16的维护操作。它还允许保留与液压施工机械完全相同的架构。
[0089]
因此,该表述“保护壳”必须以尽可能广泛的方式解释。例如,保护壳不一定限定封闭体积。它可以是具有三个侧面的矩形箱体。
[0090]
图9示出了本发明的另一变型例,其应用于运输车(或铰接式运输车)。为了附图清楚起见,这里仅示出了该运输车的后部。在该变变型例中,电动致动器10用于操作该运输车的车斗3,即,用于使车斗上下倾翻。
[0091]
在本示例中,当电动机16被接通(即,被供电)时,它驱动杆件12围绕轴线x12旋转。由于所述螺旋联接,杆件12的旋转导致滑架14沿着杆件12向前或向后平移,这取决于电动机16的旋转方向。结果,连接杆18迫使车斗3围绕该车斗与底盘之间的铰接件旋转(参见箭头r2)。因此,电动致动器10形成了一种简单装置,以根据电动机16的旋转方向而使车斗3上下倾翻。
[0092]
图10示出了本发明的另一变型例,其中,引导装置包括两个导轨24,所述两个导轨
24沿着与轴线x12平行的方向彼此平行地延伸。在由挖掘机动臂形成的示例中,这两个导轨24被相对于第二元件固定。更具体地,这两个导轨可以与第二元件(即,与动臂金属结构)成一体。在本示例中,导轨24为沿着杆件12移动的一个滑架/滑动元件14提供纵向引导。在未示出的变型例中,所述导轨可以为两个或更多个滑架提供引导。
[0093]
而且,在未示出的变型例中,引导装置可以包括不止两个导轨,例如三个或四个不同的导轨。
[0094]
图11示出了本发明的另一实施例,其中,电动机和滑动元件(滑架)是同一个元件。详细地,该电动机的输出轴16a与齿轮17a(根据蜗杆传动接合)啮合,该齿轮本身与齿条12(根据齿轮齿条接合)啮合,该齿条12也可以被认为是与上文描述的本发明的其他实施例的杆件类似的杆件。因此,电动机输出轴的旋转被传递到齿轮,这导致电动机/滑架根据电动机输出轴的旋转方向而沿着该齿条来回平移(如图11中的双向箭头d1所示)。所述滑动元件(包括电动机16和支撑元件14)与连接杆18的第一端铰接。连接杆18的另一端被铰接在施工设备的第一元件上,在该具体示例中,第一元件是上框架4。
[0095]
对所述滑动元件14+16的引导可以通过齿条12来保证,或者通过专用引导装置(未示出)来保证。
[0096]
在未示出的变型例中,该系统可以包括不止一个齿条,例如每个都与滑架的一个或多个齿轮接合的两个齿条。
[0097]
图12示出了替代实施例,其中,电动机16的输出轴16a与至少两个相继的齿轮17a(例如三个相继的齿轮17a)啮合,由于齿轮齿条接合,这些齿轮都与同一个齿条17b接合。齿轮17a安装在/设置在用作滑动元件的支撑件14上。电动机输出轴的旋转导致这些齿轮的旋转并因此导致沿着齿条17b的移动。支撑件14与连接杆18的一端铰接,其功能与上文描述的其他实施例的功能相同。
[0098]
最后,图13示出了本发明的另一实施例,其中,电动机16是线性致动器,其被配置成使杆件12来回移动。滑动元件或滑架14固定到杆件12,特别是在与电动机16相反的一端。至于其他实施例,连接杆18铰接到滑架14。再次,杆件的轴线x12相对于第二元件被固定/不动,在本示例中,该第二元件是动臂80。
[0099]
在适用于本文中描述的任一实施例的未示出的变型例中,电动机16和杆件12的组件可以在该施工设备的第二元件(例如动臂80)内移动/旋转。这些运动是通过引入一些功能间隙/枢转点并允许吸收一些变形而实现的。
[0100]
应当理解,本发明不限于上文所述和附图中示出的实施例;相反,本领域技术人员将认识到,在所附权利要求书的范围内可以做出许多改变、变型和修改。
[0101]
例如,上文描述的致动器中的至少一个可以包括附加的电动机。通常,两个电动机可以各自位于杆件12的一端处。替代地,这两个电动机可以并排(即,并行)布置。这两个电动机可以相同或可以不同。
[0102]
显然,本着相同的精神,所述致动器可以包括两个或更多个杆件12,而与电动机16的数量无关。例如,通过使用适当的传动装置,可以仅使用一个电动机来驱动两个杆件12。
[0103]
类似地,所述致动器可以包括两个或更多个滑动元件14,而与杆件12的数量无关。
[0104]
类似地,所述致动器可以包括两个或更多个连接杆18,而与滑动元件14的数量无关。
[0105]
而且,在另一示例中,两个或更多个致动器可以用于致动同一个元件。
[0106]
在另一示例中,人们可以很好地想象到这样一种配置:其中,所述杆件不直接由电动机驱动。在该示例中,电动机可以垂直于杆件的轴线布置并且通过角齿轮机构(例如蜗轮蜗杆)来驱动杆件。配置的选择取决于所述电动机可用的空间。在另一示例中,电动机16可以平行于杆件12布置(但不同轴;而是并排)。因此,在电动机16与杆件12之间设置有传动系统。该传动系统可以是齿轮组(小齿轮链)、皮带或链条。它还用作减速器。
[0107]
在另一示例中,所述电动机可以包括减速器,通常是行星减速器(行星齿轮组)。
[0108]
在另一示例中,装配到施工机械2的电动致动器10中的至少一个(优选是每个致动器10)包括静态制动器(也称为“安全制动器”),以在电动机16关闭时将滑动元件14保持在位。这种类型的制动器的更多详细信息可以参考关于该主题的已有内容,相关内容在以下网页中描述:https://fr.wikipedia.org/wiki/frein_de_s%c3%a9curit%c3%a9,该网页的内容通过引用的方式并入本文。
[0109]
在另一示例中,致动器10的元件之间的枢转连接件可以包括缓冲装置(例如衬套),以保护机构免受冲击或感应力的影响。
[0110]
在另一示例中,装配到该施工机械的电动致动器10中的至少一个(优选是每个致动器10)包括位置传感器或旋转传感器,以提供对机械2的移动部分的位置的闭环或闭环控制。
[0111]
在另一示例中,施工机械2可以配备有一个或多个力或扭矩传感器。
[0112]
在另一示例中,开口26或每个开口26设置有防尘和/或防水装置,例如刷子、橡皮筋和/或偏转器。
[0113]
在另一示例中,上文描述的引导装置可以由蜗轮补充或替代,以使滑架14沿表面滚动,从而确保无摩擦引导。
[0114]
根据未示出的变型例,本文中所称的致动器可以用于使施工设备(例如挖掘机或装载机)的铰接刀片移动。以已知的方式,该刀片被紧固到车辆的下框架,通常紧固至前部以用于在施工或改造作业期间推动以下材料:土壤、沙子、雪、瓦砾或岩石。在该特定实施例中,挖掘机或装载机的下框架可以视为本文中所称的“第二元件”。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1