一种带有人工智能技术的机器人中医理疗设备的设计的制作方法
1.本发明涉及中医理疗领域。
背景技术:
2.中医越来越得到大众的重视,理疗已经走进了日常生活,但是有其不方便之处,就拿艾灸来说,经常需要专业的护理人员在旁边协助,这给用户带来了麻烦。目前的中医理疗设备的作用都比较单一,如申请号:cn202010302196.5所提到的仅仅适用于按摩,那么是否可以以一台设备完成艾灸、按摩、推拿、红外理疗、火罐、针灸、刮痧、身体检测等等不同的工作?以往发明者所设计的理疗设备,如申请号:cn202010218177.4所述的设计,体积太大,应用单一,大都是在人工协助下使工作头移动到穴位之处,对于在背部的穴位,用户自己就没有办法解决。还有如申请号:cn201911397184.9和申请号:cn201720845536.2所述的设备,其工作头无法跟随人体外形的变化,无法保持垂直于人体表面,更无法实现类似于刮痧板等具有方向性的工作头。可以在家庭用机器人的机械手上装有一个通用接口,该通用接口能匹配完成不同工作的部件上的接口。这种作用于人体实现不同工作的部件,本发明它叫工作头。
3.作为家庭用机器人,根据需要可以人工或自行移动,因其重量和空间尺寸是有限的,工作时容易翻到,因此就要设法把机器人固定住,借助于用户的卧具固定是个不错的方法。
4.为了能够实现自动定位穴位,需要采用3d识别技术,而申请号:cn202010302196.5所述的结构光3d扫描技术,因为该技术组件价格较贵无法得到大规模应用,因此本发明中采用tof技术方案,因为该方案包括投射器和接收模组,通过控制投射器发出经调制的近红外光波,遇物体后反射,接收模组计算发射光波和接收光波的时间差或相位差,换算成被拍摄景物的距离,以获取深度信息,实现起来更为简单,因此价格较便宜。
5.虽然人体的结构组成部分是一样的,但是各个个体的比例尺寸使不一样的,因此不能统一用“脐下三寸”来定位丹田穴,可以通过标准人体模型来修正,得到各个体的穴位。
6.要想机械手能够配合不同的工作头,要求机械手与工作头之间应该有统一的接口关系,但是由于各工作头的功能不同,会有不同的输入和输出形式,就需要设计出尽可能大的包容性,能够通用而不繁杂的接口,这种接口,要能够检测到工作头传递过来的力,即在机械手上需要设计六向测力传感器。还要能够传递电源和工作头的id身份、命令、检测数据等,作为常用的串行通信接口标准的rs-232数据接口或者usb接口,和测量电阻式应变片变形进而计算出力,就可以实现这一要求。
7.如果采用数控铣更换刀具一样,采用气压来装卸刀具的办法来更换工作头,也可以采用比较成熟的机械手的压力加锁扣再加电磁阀解锁的办法来解决。
8.对于艾灸工作头,离不开艾条的安装、点燃、根据计算燃烧后剩余高度调整到皮肤之间的距离、过程集灰到多长时间后会掉落,这样才能做好过程除灰。可以采用汽车点烟器的原理设计。艾条剩余长度=原来的长度-统计的艾条燃烧速度*燃烧时间。
9.为了建立多重的安全手段,在艾灸工作头工作的时候,两个温度计一直贴在皮肤上,当工作头脱离工作状态时,温度计跟随离开,同时还需要在艾条和皮肤之间放置金属网。
10.理疗机器人系统复杂,用户会觉得操作麻烦,需要一套简化的无误的操作界面。人工智能技术的应用就能满足这一要求。
11.因为普通人家的家庭空间有限,希望机器人在工作完毕能够折叠以后在一个狭小的空间。
技术实现要素:
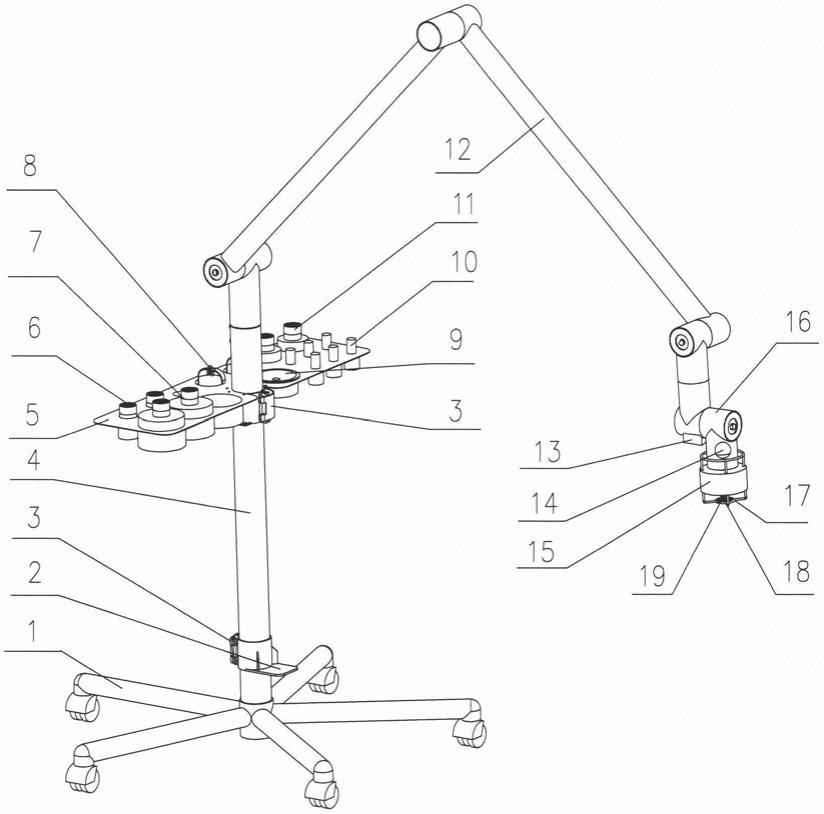
12.本发明的目的在于提供一种带有人工智能技术的机器人理疗设备的设计。包括六轴联动(六个自由度的机器人的机械手可以到达所设计的运动范围内的位置和姿态)的机器人系统(图1)、底座固定系统(2、3)、接口(14、37)、tof技术的3d人工智能处理系统(13)、工作头库(5)、控制系统(图7)等。工作头库里具有艾灸(图5)、按摩(11)、红外理疗(7)、火罐(8)、刮痧、身体检测等功能的工作头及其所需配件,机器人能够使工作头在所需的方向上工作。
13.机器人的控制部分(图7),包括手机app、机器人控制系统(控制着机器人的固定和摇臂(12)及其最末端的机械手(16)的运动、工作库(5)的工作和工作头(6、7、8、11)的工作),图像运算(接受tof技术的3d扫描),手机app的控制系统可以给机器人控制系统和图像运算系统发送指令,又可以接受机器人控制系统和图像运算系统状态和信息反馈,图像运算系统又将部分将部分结果发送给机器人控制系统。
14.由于机器人在地面上支撑脚(1)之间的距离,相比机器人摇臂(12)的长度比较短,当机器人工作的时候,容易位移以至于翻到,造成安全隐患,为此,设计的特征是机器人的底座固定在卧具如床(43)或沙发等上,无论是夹、顶、扣、锁等作用力,无论是手动固定或者是自动固定。
15.机械手(16)上的接口(14)与工作头之间接口(37)的设计,其接口设计的特征在于接口包括:涉及包括如下接线中,任意若干根接线的组合:交流220v火线和零线、直流24v或者12v(31),地(33),gs232数据接口(或者usb接口)的发射(29)和接受(30),一个传感器直接传输线,保留若干根冗余的线路。为了接口的设计具有通用性和可拓展性,接口的一端在机器人的机械手里,另一端在工作头上,两端对插以使导线相连并固定。
16.接口内放置四个圆周方向测力传感器(27)、两个轴向测力传感器(22),来感知工作头受力状态,可通过测力传感器获得的数据,设计机器人摇臂的姿态调整;用户也可以手工拖着工作头到达某个穴位处工作,或者紧急时将机械手(16)推开,即按照用户使力的方向随动。其中四个圆周方向测力传感器和两个轴向测力传感器,通过铝型材(23,25,27)加工后贴电阻应变(20,24,26)片来完成,可以实现低价格,也可以采用小尺寸的柱式测力传感器。
17.机械手的接口内的接触点设计又预压弹簧(42)或簧片,当机械手上的接口(14)压紧工作头上的接口(37)上时,侧向插销(34)弹出,锁住工作头不能弹出,确保线路闭合。一旦电磁动力(28)通电插销(34)退出,靠线圈的磁力抽出插销,机械手(16)自然弹出工作头,这就实现了工作头装与卸,如图所示的。
18.针对火罐工作头(8),机械手的接口(14)内包含有从抽气泵(39)接来的气管(38),气管在接口的轴心位置,再火罐工作头与机械手接口配合处采用柔性密封垫片(41)密封。这样在更换不同的火罐时,在火罐的周向上没有方向性。如果在一定时间内低压建立不起来,则说明火罐口部与人体皮肤之间不平行。机器人根据测力传感器的受力情况,调整机械手使火罐口部与人体皮肤平行后再试。
19.在进行穴位计算前,先要建立标准人体的3d图,然后根据用户的性别、年龄、身高、体重、人体组成特征(骨骼的尺寸按关节之间的长度比例缩放;在关节之间某位置软组织的宽度=3d的宽度-骨骼宽度),修正各关节部分的标准人体的3d图,修正后的标准人体的3d图,就是用户的3d图,包含有用户姿态、软硬组织、和穴位位置的3d图。
20.用户可以在手机上记录每次修正后的3d信息,在手机app上用户可以根据自己的3d历史记录,查看自己各部位的3d尺寸变迁,可以提请用户注意自己哪一部分发生了较大的尺寸变化。
21.由于此机器人系统比较复杂,机器人开始工作前,优选人工(或自动)推进机器人到卧具旁边,打开机器人电源,电源指示灯亮,自动打开wifi或者蓝牙,机械手(16)自动展开到待机拍摄位置,用户将工作头放置在工作头库(5)规定的位置,人工使机器人(2,3)与卧具(43)之间相对固定。然后作为特例来说明艾灸工作头(8)的工作,其他工作头的工作也以此为参照,结合过程中的人工操作,优选地规定各系统之间的软件通信协议:用户打开手机“理疗”app
→
连接机器人的wifi或者蓝牙
→
用户登录(如果是新用户,需要注册:用户姓名、年龄、性别、身高、体重)
→
用户按照顺序列出这一次需要理疗的穴位名称、理疗项目和承受温度、压力、吸力等参数
→
用户点击“设置完毕
”→
自动检测机器人各部分的准备状态,如果为假,则需指出问题。如果为真,则手机屏幕显示出“开始扫描
”→
用户躺下(平躺或平卧,四肢并拢、放松),用户点击“开始扫描
”→
点击“开始扫描”5秒钟后,手机指令下达给机器人
→
tof技术系统(13)进行3d扫描,3d图像运算以后,指示机器人移动摇臂式机械手至合适的“扫描位置”,直到该在该“扫描位置”将摄像范围的长边与人体中心线一致,人体边界都包含在图像内,得到完整的3d图像为止
→
用户识别(如果是新用户,则录入脸部3d,以便下次使用时用于用户识别)为真
→
机器人识别肚脐,在3d上放置匹配的与3d骨骼
→
按照设置的穴位,机器人进行穴位位置计算
→
机器人将附带穴位指示的3d图像发送给用户的手机
→
机器人回到待机位置
→
待用户检查,点击“开始工作
”→
点击“开始工作”5秒钟后,手机指令下达给机器人
→
移至工作头库(5)
→
对准艾灸工作头接口(37)按压
→
电磁动力(28)连着的插销(34)弹出
→
接口(14,37)接通
→
调用机器人端与艾灸工作头有关的控制软件,同时启动工作头端的软件
→
识别并判断艾灸工作头(8)的id为真
→
工作头(8)进入工作库(5)艾条(10)装配位置,套在艾条(10)上,防烫网(19)自动打开
→
安装艾条(10)的同时靠压力传感器(22)计算出艾条(10)的长度
→
计算艾条(10)的装配长度,判断合格为真
→
打开电热丝电源开关,电热丝点燃艾条
→
机器人再次回到“扫描位置
”→
再次判断位移后的用户、新的3d和穴位为真
→
机械手(16)携艾灸工作头(8)移动到穴位之处开始工作
→
根据统计出的艾条(10)燃烧速度向皮肤推进艾灸工作头
→
接口阶段性地传递两个温度传感器的温度,判断两个温度传感器(17,18)都在正常工作,同时判断是否在用户设置的范围内
→
如果用户感知是否合适,如果不合适,用户可以过程调整温度,也可以声控手机,由手机发送指令给机器人,并记录发布指令后的温度参数
→
根据燃烧集灰的时间节奏进行过程除灰(9)
→
如果
艾条剩余长度=艾条的起始长度-燃烧速度x已经点燃时间=0;同时温度有下降的突变,判断艾条燃烧完成为真
→
最后除灰
→
自动记录这一次理疗信息,已被后续调用
→
有下一个艾条的艾灸任务为真,则重复,如果为假
→
携艾灸工作头(8)回到工作头库(5)
→
电磁动力(28)连着的插销(34)弹出
→
艾灸工作头(8)与机械手(16)分开
→
机器人回到待机状态
→
用户手动或通过手机发部“任务完成”指令,卸下锁扣(3),关闭电源
→
机器人的摇臂自动回到折叠位置(图9),电源指示灯灭
→
用户手机退出“理疗”app。整个过程中,用户操作不多,而且每一步操作都有手机屏幕文字(和语音)提示,过程简单,容易上手。
附图说明
22.在附图中,1底座,2固定架,3锁扣,4立柱,5工作头库,6按摩头,7红外理疗头,8火罐,9灰缸、10艾条,11其他工作头,12六轴摇臂,13为tof技术3d扫描系统,14机械手接口,15艾灸工作头,16机械手,17温度计,18温度计,19防护网,20上应变片,21拉压杠,22上下测力传感器,23上测力悬臂梁,24下应变片,25下测力悬臂梁,26周向四个应变片,27周向测力计,28电磁动力,29接受,30发射,31为24v电源,32周向悬臂,33地,34插销,35插销孔,36导向架,37工作头接口,38气管,39气泵,40气塞,41密封垫片,42预压弹簧,43床。
23.图1为带有人工智能技术的机器人,图2为上下传感器关系图,图3为机械手端接口与测力传感器的相对位置,图4气泵、气管、与接口的关系图,图5为艾灸工作头,图6为机械手端接口与火罐工作头的关系图,图7为控制系统图,图8为机器人与床的关系图,图9为机器人折叠位置图。
具体实施方式
24.既然希望将这种理疗机器人作为医疗设备来生产,就需要得到国家权威的中医院的使用、检验和认可,即在中医理论和实践的指导之下,在中医院的病区就某些疾病,选择工作头和理疗穴位,进行临床上进行验证,被认为有效后,制定某些工作规范后才可以上市。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1