一种塑料管加工系统及加工方法与流程
本发明涉及管材加工技术领域,更具体的说是一种塑料管加工系统及加工方法。
背景技术:
公开号为cn110948765a的发明公开了一种塑料管加工设备,包括有储料室、粉碎室、热熔室、电动机,储料室的底面设置有开口,储料室的右侧面通过后固定架、前固定架固定有永磁体,储料室、粉碎室的前侧面通过连接臂连接固定,储料室、粉碎室之间设置有滑动板,滑动板上自前至后固定有前导轨、后导轨,电动机的输出端设置有旋转轴,旋转轴伸入到粉碎室内部,旋转轴的中部设置有用于粉碎塑料原料的粉碎刀具,粉碎室、热熔室之间通过中通管连通,横向连接板的顶面设置有加热单元;但是该发明不能对塑料管进行自动钻孔加工。
技术实现要素:
本发明提供一种塑料管加工系统,可以对塑料管进行自动钻孔加工。
本发明涉及管材加工技术领域,更具体的说是一种塑料管加工系统,包括管材翻转机构、翻转驱动机构、自动钻孔机构和管材夹紧机构,所述的管材夹紧机构设置有两个,两个管材夹紧机构镜像设置,两个管材夹紧机构均连接在管材翻转机构上,反转驱动机构连接在管材翻转机构上,自动钻孔机构连接在管材翻转机构上。
作为本技术方案的进一步优化,本发明一种塑料管加工系统所述的管材翻转机构包括支架、吊板、调节丝杆、调节电机、调节架、旋转辊、定位板和龙门架,两个龙门架分别固定连接在支架的左右两端,定位板固定连接在支架的后端,两个旋转辊分别转动连接在两个调节架上,两个调节架的底端均通过螺纹连接在调节丝杆上,调节丝杆转动连接在吊板上,吊板固定连接在支架的底端,两个调节架分别滑动连接在支架的左右两端,调节丝杆固定连接在调节电机的输出轴上,调节电机固定连接在吊板上。
作为本技术方案的进一步优化,本发明一种塑料管加工系统所述的支架上设置有滑孔,用于配合两个调节架在支架上滑动接触。
作为本技术方案的进一步优化,本发明一种塑料管加工系统所述的翻转驱动机构包括连接板、涨紧杆、驱动电机、驱动链轮和随动链轮,两个随动链轮和驱动链轮均通过链条传动,驱动链轮固定连接在驱动电机的输出轴上,驱动电机固定连接在涨紧杆的顶端,涨紧杆滑动连接在连接板上,涨紧杆与连接板之间固定连接有拉簧,连接板固定连接在支架前端的底端,两个随动链轮分别固定连接在两个旋转辊的后端。
作为本技术方案的进一步优化,本发明一种塑料管加工系统所述的自动钻孔机构包括顶架、位移丝杆、位移块、位移电机、钻孔气缸和钻孔机,钻孔机固定连接在钻孔气缸的气缸杆上,钻孔气缸固定连接在位移块上,位移块螺纹连接在位移丝杆上,位移丝杆转动连接在顶架上,顶架的左右两端分别固定连接在两个龙门架上,位移块的顶端贴合在顶架上,位移丝杆固定连接在位移电机的输出轴上,位移电机固定连接在顶架上。
作为本技术方案的进一步优化,本发明一种塑料管加工系统所述的管材夹紧机构包括凸轮、小轮、推杆、滑臂、长孔板、高度杆、杠杆、转轴、立柱、夹杆和夹块,小轮接触在凸轮上,小轮转动连接在推杆上,推杆滑动连接在滑臂上,长孔板固定连接在推杆上,高度杆滑动连接在长孔板中,高度杆转动连接在杠杆上,杠杆转动连接在转轴上,转轴固定连接在立柱上,夹杆滑动连接在立柱中,夹块固定连接在夹杆上,夹杆滑动连接在杠杆上,两个滑臂分别固定连接在两个调节架上,两个凸轮分别固定连接在两个旋转辊的前端。
作为本技术方案的进一步优化,本发明一种塑料管加工系统所述的管材夹紧机构还包括升降气缸,两个立柱分别固定连接在两个升降气缸的气缸杆上,两个升降气缸分别固定连接在两个调节架上。
作为本技术方案的进一步优化,本发明一种塑料管加工系统所述的两个推杆与两个滑臂之间均固定连接有弹簧。
作为本技术方案的进一步优化,本发明一种塑料管加工系统所述的两个夹块为c型结构。
使用上述的一种塑料管加工系统加工塑料管的方法,该方法包括以下步骤:
步骤一:将塑料管放置在两个旋转辊上,驱动电机来驱动两个旋转辊同方向转动,来带动塑料管转动;
步骤二:当两个凸轮分别顶着两个推杆转动,使两个夹块从左右两侧夹紧塑料管,钻孔气缸带动钻孔机下降对塑料管进行钻孔;
步骤三:再次使用驱动电机来驱动两个旋转辊同方向转动,来带动塑料管转动,使塑料管不同方向转动到钻孔机下方;
步骤四:再次使用钻孔气缸带动钻孔机下降对塑料管进行钻孔,如此反复对塑料管加工出以塑料管轴心为圆心且均布在塑料管上的多个钻孔。
本发明一种塑料管加工系统的有益效果为:
塑料管加工系统可以通过驱动电机带动驱动链轮转动,驱动链轮通过链条同时带动两个随动链轮转动,使两个随动链轮分别带动两个旋转辊同方向转动,来使两个旋转辊带动塑料管以轴线为圆心进行自身的旋转,来实现塑料管不同方向的转换,同时能够使塑料管被滚圆来保证塑料管的直线度,随后钻孔气缸带动钻孔机下降对塑料管钻孔,如此反复完成多个以塑料管轴线为圆心并且均匀分布在塑料管壁上的孔;同时通过两个旋转辊同向转动时,会分别带动两个凸轮转动,两个凸轮会顶着两个小轮来使两个推杆带动两个杠杆转动,从而使两个夹杆带动两个夹块从塑料管的左右两侧对塑料管进行夹紧,避免在钻孔时,塑料管发生转动或者偏移,确保钻孔的准确性。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
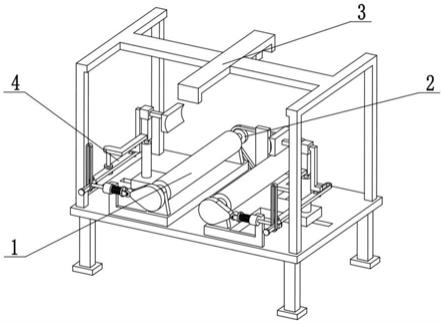
图1为本发明一种塑料管加工系统的结构示意图;
图2为一种塑料管加工系统另一个方向的结构示意图;
图3为管材翻转机构的结构示意图;
图4为管材翻转机构另一个方向的结构示意图;
图5为翻转驱动机构的结构示意图;
图6为自动钻孔机构的结构示意图;
图7为管材夹紧机构的结构示意图。
图中:管材翻转机构1;支架1-1;吊板1-2;调节丝杆1-3;调节电机1-4;调节架1-5;旋转辊1-6;定位板1-7;龙门架1-8;翻转驱动机构2;连接板2-1;涨紧杆2-2;驱动电机2-3;驱动链轮2-4;随动链轮2-5;自动钻孔机构3;顶架3-1;位移丝杆3-2;位移块3-3;位移电机3-4;钻孔气缸3-5;钻孔机3-6;管材夹紧机构4;凸轮4-1;小轮4-2;推杆4-3;滑臂4-4;长孔板4-5;高度杆4-6;杠杆4-7;转轴4-8;立柱4-9;夹杆4-10;夹块4-11;升降气缸4-12。
具体实施方式
具体实施方式一:
下面结合图说明本实施方式,本发明涉及管材加工技术领域,更具体的说是一种塑料管加工系统,包括管材翻转机构1、翻转驱动机构2、自动钻孔机构3和管材夹紧机构4,所述的管材夹紧机构4设置有两个,两个管材夹紧机构4镜像设置,两个管材夹紧机构4均连接在管材翻转机构1上,反转驱动机构2连接在管材翻转机构1上,自动钻孔机构3连接在管材翻转机构1上。
将塑料管放置在管材翻转机构1上,由翻转驱动机构2驱动管材翻转机构1带动两个管材夹紧机构4将塑料管夹紧,再通过自动钻孔机构3对塑料管进行钻孔,钻孔之后翻转驱动机构2驱动管材翻转机构1继续带动塑料管转动,使塑料管不同方向转动到自动钻孔机构3正下方,自动钻孔机构3对塑料管进行钻孔,如此反复完塑料管同一位置而不同方向上的钻孔加工,实现多个环形分布在塑料管上的孔。
具体实施方式二:
下面结合图说明本实施方式,本实施方式对实施方式一作进一步说明,所述的管材翻转机构1包括支架1-1、吊板1-2、调节丝杆1-3、调节电机1-4、调节架1-5、旋转辊1-6、定位板1-7和龙门架1-8,两个龙门架1-8分别固定连接在支架1-1的左右两端,定位板1-7固定连接在支架1-1的后端,两个旋转辊1-6分别转动连接在两个调节架1-5上,两个调节架1-5的底端均通过螺纹连接在调节丝杆1-3上,调节丝杆1-3转动连接在吊板1-2上,吊板1-2固定连接在支架1-1的底端,两个调节架1-5分别滑动连接在支架1-1的左右两端,调节丝杆1-3固定连接在调节电机1-4的输出轴上,调节电机1-4固定连接在吊板1-2上。
调节电机1-4带动调节丝杆1-3转动,使调节丝杆1-3带动两个调节架1-5在支架1-1上滑动,使两个调节架1-5改变间距,来使两个旋转辊1-6可以承托不同管径大小的塑料管,同时能够使不同管径大小的塑料管的左右两端距离两个旋转辊1-6的距离是相同的,确保两个管材夹紧机构4能够跟随两个管材夹紧机构4一同移动的同时还能够对塑料管进行夹紧,能够稳固的拖住不同管径大小的塑料管。
具体实施方式三:
下面结合图说明本实施方式,本实施方式对实施方式二作进一步说明,所述的支架1-1上设置有滑孔,用于配合两个调节架1-5在支架1-1上滑动接触。
具体实施方式四:
下面结合图说明本实施方式,本实施方式对实施方式三作进一步说明,所述的翻转驱动机构2包括连接板2-1、涨紧杆2-2、驱动电机2-3、驱动链轮2-4和随动链轮2-5,两个随动链轮2-5和驱动链轮2-4均通过链条传动,驱动链轮2-4固定连接在驱动电机2-3的输出轴上,驱动电机2-3固定连接在涨紧杆2-2的顶端,涨紧杆2-2滑动连接在连接板2-1上,涨紧杆2-2与连接板2-1之间固定连接有拉簧,连接板2-1固定连接在支架1-1前端的底端,两个随动链轮2-5分别固定连接在两个旋转辊1-6的后端。
驱动电机2-3带动驱动链轮2-4转动,驱动链轮2-4通过链条同时带动两个随动链轮2-5转动,使两个随动链轮2-5分别带动两个旋转辊1-6同方向转动,来使两个旋转辊1-6带动塑料管以轴线为圆心进行自身的旋转,来实现塑料管不同方向的转换,同时能够使塑料管被滚圆来保证塑料管的直线度;而涨紧杆2-2始终拉紧驱动链轮2-4,来使链条处于涨紧状态,避免在两个旋转辊1-6的间距发生变化时链条发生掉落的问题。
具体实施方式五:
下面结合图说明本实施方式,本实施方式对实施方式四作进一步说明,所述的自动钻孔机构3包括顶架3-1、位移丝杆3-2、位移块3-3、位移电机3-4、钻孔气缸3-5和钻孔机3-6,钻孔机3-6固定连接在钻孔气缸3-5的气缸杆上,钻孔气缸3-5固定连接在位移块3-3上,位移块3-3螺纹连接在位移丝杆3-2上,位移丝杆3-2转动连接在顶架3-1上,顶架3-1的左右两端分别固定连接在两个龙门架1-8上,位移块3-3的顶端贴合在顶架3-1上,位移丝杆3-2固定连接在位移电机3-4的输出轴上,位移电机3-4固定连接在顶架3-1上。
位移电机3-4带动位移丝杆3-2转动,位移丝杆3-2带动位移块3-3前后移动,来使钻孔气缸3-5和钻孔机3-6前后移动,来实现对塑料管前后方向上不同位置的钻孔作业。
具体实施方式六:
下面结合图说明本实施方式,本实施方式对实施方式五作进一步说明,所述的管材夹紧机构4包括凸轮4-1、小轮4-2、推杆4-3、滑臂4-4、长孔板4-5、高度杆4-6、杠杆4-7、转轴4-8、立柱4-9、夹杆4-10和夹块4-11,小轮4-2接触在凸轮4-1上,小轮4-2转动连接在推杆4-3上,推杆4-3滑动连接在滑臂4-4上,长孔板4-5固定连接在推杆4-3上,高度杆4-6滑动连接在长孔板4-5中,高度杆4-6转动连接在杠杆4-7上,杠杆4-7转动连接在转轴4-8上,转轴4-8固定连接在立柱4-9上,夹杆4-10滑动连接在立柱4-9中,夹块4-11固定连接在夹杆4-10上,夹杆4-10滑动连接在杠杆4-7上,两个滑臂4-4分别固定连接在两个调节架1-5上,两个凸轮4-1分别固定连接在两个旋转辊1-6的前端。
两个旋转辊1-6同向转动时,会分别带动两个凸轮4-1转动,两个凸轮4-1会顶着两个小轮4-2来使两个推杆4-3带动两个杠杆4-7转动,从而使两个夹杆4-10带动两个夹块4-11从塑料管的左右两侧对塑料管进行夹紧,避免在钻孔时,塑料管发生转动或者偏移,确保钻孔的准确性;在两个旋转辊1-6转动一次的情况下两个夹块4-11对塑料管夹紧一次,每次在两个旋转辊1-6带动塑料管转动方向之后,两个夹块4-11便会对塑料管夹紧。
具体实施方式七:
下面结合图说明本实施方式,本实施方式对实施方式六作进一步说明,所述的管材夹紧机构4还包括升降气缸4-12,两个立柱4-9分别固定连接在两个升降气缸4-12的气缸杆上,两个升降气缸4-12分别固定连接在两个调节架1-5上。
可以通过升降气缸4-12带动立柱4-9升降,来使立柱4-9带动转轴4-8和杠杆4-7上升,同时高度杆4-6在长孔板4-5中滑动上升,来使夹块4-11根据不同管径的塑料管进行升降,确保夹块4-11的高度与塑料管的轴线位于同一水平线上,来实现对各种不同管径的塑料管进行夹紧。
具体实施方式八:
下面结合图说明本实施方式,本实施方式对实施方式七作进一步说明,所述的两个推杆4-3与两个滑臂4-4之间均固定连接有弹簧;来确保两个小轮4-2始终滚动接触在两个凸轮4-1上。
具体实施方式九:
下面结合图说明本实施方式,本实施方式对实施方式八作进一步说明,所述的两个夹块4-11为c型结构;能够对塑料管的弧形外壁进行夹紧。
使用上述的一种塑料管加工系统加工塑料管的方法,该方法包括以下步骤:
步骤一:将塑料管放置在两个旋转辊1-6上,驱动电机2-3来驱动两个旋转辊1-6同方向转动,来带动塑料管转动;
步骤二:当两个凸轮4-1分别顶着两个推杆4-3转动,使两个夹块4-11从左右两侧夹紧塑料管,钻孔气缸3-5带动钻孔机3-6下降对塑料管进行钻孔;
步骤三:再次使用驱动电机2-3来驱动两个旋转辊1-6同方向转动,来带动塑料管转动,使塑料管不同方向转动到钻孔机3-6下方;
步骤四:再次使用钻孔气缸3-5带动钻孔机3-6下降对塑料管进行钻孔,如此反复对塑料管加工出以塑料管轴心为圆心且均布在塑料管上的多个钻孔。
本发明一种塑料管加工系统的工作原理:将塑料管放置在两个旋转辊1-6上,随后驱动电机2-3带动驱动链轮2-4转动,驱动链轮2-4通过链条同时带动两个随动链轮2-5转动,使两个随动链轮2-5分别带动两个旋转辊1-6同方向转动,来使两个旋转辊1-6带动塑料管以轴线为圆心进行自身的旋转,两个旋转辊1-6同向转动时,会分别带动两个凸轮4-1转动,两个凸轮4-1会顶着两个小轮4-2来使两个推杆4-3带动两个杠杆4-7转动,从而使两个夹杆4-10带动两个夹块4-11从塑料管的左右两侧对塑料管进行夹紧,避免在钻孔时,塑料管发生转动或者偏移,确保钻孔的准确性,然后驱动电机2-3停止,此时塑料管处于被夹紧的状态,钻孔气缸3-5带动钻孔机3-6下降,对钻孔机3-6正下方的塑料管壁进行钻孔,钻孔之后钻孔气缸3-5带动钻孔机3-6升起,随后驱动电机2-3再次启动,同时两个凸轮4-1转动,两个弹簧带动两个推杆4-3向内侧移动,此时两个夹块4-11会松开塑料管的外壁,而两个旋转辊1-6带动塑料管以轴线为圆心继续进行旋转,在两个凸轮4-1再次顶着两个小轮4-2使两个推杆4-3向外侧移动并到达最大位移时,驱动电机2-3再次停止,而塑料管已经将不同的方向转动到了钻孔机3-6正下方,此时两个夹块4-11会再次夹紧塑料管的外壁,然后钻孔气缸3-5再次带动钻孔机3-6下降对塑料管壁同一位置但不同方向进行钻孔,如此反复操作便可以完成多个以塑料管轴线为圆心并且均匀分布在塑料管壁上的孔,能够实现自动化批量加工,并且完全代替人工,节省劳动力,高效快捷,多个钻之间的精准度高,多个钻的分布均匀美观。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 还没有人留言评论。精彩留言会获得点赞!