基于承载平台联动的机器人作业路径规划方法与流程
1.本发明涉及一种路径规划领域,尤其涉及基于承载平台联动的机器人作业路径规划方法。
背景技术:
2.现在机器人带电作业过程中,需要操作人员在带电作业平台上即绝缘斗臂车进行手工控制,绝缘斗臂车的绝缘斗中安装有作业机器人,通过操作人员操作绝缘斗臂车的控制面板或者通过远程操控,控制绝缘斗臂车的移斗过程,将作业平台移动到指定位置,以便机器人完成带电作业,操作上很不方便,需要依赖操作人员的熟练度,同时存在一定的安全风险,例如高空坠物。
3.例如,一种在中国专利文献上公开的“一种高压带电作业主从机器人作业装置和方法”,其公告号cn109514520a,装置包括:无人机、绝缘斗臂车和伺服控制平台;所述无人机携带有双目视觉摄像头,悬停于所述绝缘斗臂车上方;所述伺服控制平台与所述绝缘斗臂车通信连接。通过对无人机来对故障点进行定位,能够监控整个作业环境。
4.该方案完成机器人作业需要人工操作,操作不便,同时存在高空坠物的风险。
技术实现要素:
5.本发明主要解决现有技术机器人操作需要人工操作,操作不便的问题;提供基于承载平台联动的机器人作业路径规划方法,通过在机器人上融合作业平台的自动控制能力,降低操作难度,提供安全性。
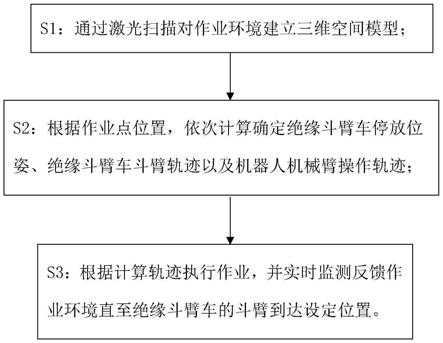
6.本发明的上述技术问题主要是通过下述技术方案得以解决的:基于承载平台联动的机器人作业路径规划方法,包括以下步骤:s1:通过激光扫描对作业环境建立三维空间模型;s2:根据作业点位置,依次计算确定绝缘斗臂车停放位姿、绝缘斗臂车斗臂轨迹以及机器人机械臂操作轨迹;s3:根据计算轨迹执行作业,并实时监测反馈作业环境直至绝缘斗臂车的斗臂到达设定位置。
7.本方案以作业点位置为目标,分别计算绝缘斗臂车停放位姿、斗臂轨迹和操作轨迹,使其能够精准得到达目标位置进行操作;分别计算轨迹,确保在每个细微轨迹的运动过程中均不会发生碰撞、干涉。
8.作为优选,以作业点位置为目标,将绝缘斗臂车的斗臂和机器人的机械臂作为整体多轴连接件;遍历多轴连接件的位姿,当多轴连接件的末端处于作业点位置的作业范围内时,记录关联该多轴连接件的位姿及对应的绝缘斗臂车停放位置;将记录的斗臂车停放位置集合,获得斗臂车停放位姿。
9.将绝缘斗臂车的斗臂与机器人的机械臂作为整体计算,用于计算绝缘斗臂车的停
车范围与方向,用于粗定位。
10.作为优选,绝缘斗臂车停放位姿包括停放坐标以及停放方向。绝缘斗臂车的停放位置与方向影响斗臂的运动轨迹。
11.作为优选,遍历所有斗臂车停放位姿,将机器人在斗臂末端的活动范围作为整体执行范围;判断在各斗臂车停放位姿下,斗臂处于不同位姿时,工作点位置是否位于斗臂车斗臂的整体执行范围内;若是,则关联记录此时的斗臂车停放位姿与斗臂车斗臂位姿,作为斗臂车执行位姿;若否,则对下一位姿进行判断;依次计算斗臂车执行位姿的斗臂轨迹,结合三维空间模型判断斗臂轨迹与三维空间模型中环境物体间的距离是否小于安全距离阈值,若是,则剔除该斗臂轨迹;否则,将该斗臂轨迹纳入绝缘斗臂车斗臂轨迹集合中。
12.将机器人看做斗臂末端的一个点,计算单独计算绝缘斗臂车斗臂的轨迹,保证在斗臂升降的过程中不会与周围环境发生干涉。
13.作为优选,遍历所有斗臂执行位姿,判断斗臂执行位姿是否含有至少一条斗臂轨迹,若是,则保留斗臂执行位姿与斗臂轨迹;若否,则剔除该斗臂执行位姿。确保斗臂执行位姿至少存在一条轨迹路径能够得到。
14.作为优选,遍历所有斗臂执行位姿,计算在不同斗臂执行位姿下机器人机械臂操作轨迹;判断机器人机械臂末端是否处于工作点位置的作业范围内,若是,则进入下一步判断,否则剔除该机器人机械臂操作轨迹;结合三维空间模型判断机器人机械臂操作轨迹与三维空间模型中环境物体间的距离是否小于安全距离阈值,若是,则剔除该机器人机械臂操作轨迹;否则,将该机器人机械臂操作轨迹纳入机器人机械臂操作轨迹集合中。
15.在确定斗臂车停放位姿以及斗臂执行位姿后,再计算在对应位姿下机器人机械臂的操作轨迹,确保机器人机械臂的操作轨迹不会与环境发生干涉。
16.作为优选,任意选择存在机器人机械臂操作轨迹集合中的任一轨迹作为执行轨迹,并选择其对应关联的斗臂执行位姿、斗臂轨迹以及绝缘斗臂车停放位姿作为最终作业轨迹。
17.根据有效的机械臂操作轨迹依次关联确定工作轨迹,从目标开始确定路径。
18.作为优选,根据最终作业轨迹作业;实时监测反馈作业环境,与三维空间模型比较;当实时监测数据与三维空间模型出现偏差时,计算实时监测数据与最终作业轨迹的距离,若距离小于安全距离阈值,则告警,否则继续检测反馈作业环境,直至绝缘斗臂车的斗臂到达设定位置。
19.根据实时监测数据调整,保证实际运行轨迹不会与环境中的物体发生碰撞。避免周围环境发生突变(如有动物闯入)而影响作业。
20.本发明的有益效果是:1.以作业点位置为目标,分别计算绝缘斗臂车停放位姿、斗臂轨迹和操作轨迹,使其能够精准得到达目标位置进行操作。
21.2.分别计算轨迹,确保在每个细微轨迹的运动过程中均不会发生碰撞、干涉。
22.3.根据实时监测数据调整,保证实际运行轨迹不会与环境中的物体发生碰撞。避免周围环境发生突变而影响作业。
附图说明
23.图1是本发明的基于承载平台联动的机器人作业路径规划方法流程图。
具体实施方式
24.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
25.实施例:本实施例的基于承载平台联动的机器人作业路径规划方法,如图1所示,包括以下步骤:s1:通过激光扫描对作业环境建立三维空间模型。
26.通过激光雷达扫描建立一般情况下的三维空间模型。三维空间模型中包括工作环境以及可能作为操作对象的设备。通过对三维空间模型建立三维坐标系确定绝缘斗臂车与机器人的位姿。
27.s2:根据作业点位置,依次计算确定绝缘斗臂车停放位姿、绝缘斗臂车斗臂轨迹以及机器人机械臂操作轨迹。
28.绝缘斗臂车停放位姿包括停放坐标以及停放方向。绝缘斗臂车停放位姿的确定过程包括:a1:以作业点位置为目标,将绝缘斗臂车的斗臂和机器人的机械臂作为整体多轴连接件。
29.在本实施例中,绝缘斗臂车的斗臂为三轴机械臂,斗臂车的斗臂末端的绝缘斗中设置有机械人;机器人为六轴机械臂。所以,在本实施例中,绝缘斗臂车的多轴连接件为九轴连接件。
30.a2:遍历多轴连接件的位姿,当多轴连接件的末端处于作业点位置的作业范围内时,记录关联该多轴连接件的位姿及对应的绝缘斗臂车停放位置。
31.多轴连接件的位姿通过各轴端点的坐标确定;绝缘斗臂车的停放位置由车头中点和车尾中点的坐标确定,确定停放位置范围与停放方向。
32.a3:将记录的斗臂车停放位置集合,获得斗臂车停放位姿。
33.将绝缘斗臂车的斗臂与机器人的机械臂作为整体计算,用于计算绝缘斗臂车的停车范围与方向,用于粗定位。
34.根据计算得到的斗臂车停放位姿,进一步确定绝缘斗臂车的斗臂执行位姿及其对应轨迹。计算过程如下:b1:遍历所有斗臂车停放位姿,将机器人在斗臂末端的活动范围作为整体执行范围。
35.将机器人看做斗臂末端的一个点,单独计算绝缘斗臂车斗臂的轨迹,保证在斗臂升降的过程中不会与周围环境发生干涉。
36.b2:判断在各斗臂车停放位姿下,斗臂处于不同位姿时,工作点位置是否位于斗臂车斗臂的整体执行范围内。在同一个确定的斗臂车停放位姿下,遍历不同的斗臂位姿,进行
工作点位置的判断。
37.若工作点位置位于斗臂车斗臂的整体执行范围内,则关联记录此时的斗臂车停放位姿与斗臂车斗臂位姿,作为斗臂车执行位姿;若工作点位置不在斗臂车斗臂的整体执行范围内,则对下一斗臂位姿进行判断,直至所有斗臂位姿判断完成,返回步骤b1。
38.b3:依次计算斗臂车执行位姿的斗臂轨迹,结合三维空间模型判断斗臂轨迹与三维空间模型中环境物体间的距离是否小于安全距离阈值,若是,则剔除该斗臂轨迹;否则,将该斗臂轨迹纳入绝缘斗臂车斗臂轨迹集合中。
39.保证在斗臂升降的过程中不会与周围环境发生干涉。
40.b4:遍历所有斗臂执行位姿,判断斗臂执行位姿是否含有至少一条斗臂轨迹,若是,则保留斗臂执行位姿与斗臂轨迹;若否,则剔除该斗臂执行位姿。
41.确保斗臂执行位姿至少存在一条轨迹路径能够得到。
42.在确定了绝缘斗臂车停放位姿以及对应的斗臂执行位姿与斗臂轨迹后,进一步计算机器人的机械臂操作轨迹。机械臂操作轨迹的计算过程包括:c1:遍历所有斗臂执行位姿,计算在不同斗臂执行位姿下机器人机械臂操作轨迹。
43.c2:判断机器人机械臂末端是否处于工作点位置的作业范围内,若是,则进入下一步判断,否则剔除该机器人机械臂操作轨迹。
44.c3:结合三维空间模型判断机器人机械臂操作轨迹与三维空间模型中环境物体间的距离是否小于安全距离阈值,若是,则剔除该机器人机械臂操作轨迹;否则,将该机器人机械臂操作轨迹纳入机器人机械臂操作轨迹集合中。
45.在确定斗臂车停放位姿以及斗臂执行位姿后,再计算在对应位姿下机器人机械臂的操作轨迹,确保机器人机械臂的操作轨迹不会与环境发生干涉。
46.在本实施例中,利用运动学和动力学库kdl(kinematics and dynamics library)中的算子对上述轨迹计算问题建模,并进行逆运动求解。
47.设定时间长度t内驱动末端位置移动d;n轴的对象表示为:d=(d1,d2,...,dn)根据对象实际作业工况,以及n轴对象各自的运动学状态,建立每一轴对象的运动速度方程:其中,分别表示第i轴对象绕x轴、y轴和z轴的角速度;分别表示第i轴对象在x轴、y轴和z轴方向上的线速度;si表示第i轴对象的变化状态。
48.在δt时间内第i轴对象的移动距离δdi表示为:δdi=δsi·
δt根据si求导获得对象的加速度为:综上,δt时间内ai的变化量表示为:
在实际的应用过程当中,不仅电机本身会提供驱动力让斗臂达到最终的目标位置,而且电机驱动力的大小与速度严格正相关。另外,不同轴之间的连接点也会产生各不相同的摩擦力,而这个摩擦力的产生则是与时间、驱动斗臂移动的角度有关,即同的摩擦力,而这个摩擦力的产生则是与时间、驱动斗臂移动的角度有关,即同的摩擦力,而这个摩擦力的产生则是与时间、驱动斗臂移动的角度有关,即同的摩擦力,而这个摩擦力的产生则是与时间、驱动斗臂移动的角度有关,即其中,和分别为表示第i轴斗臂在x轴、y轴和z轴方向上受到的力;和分别表示第i轴斗臂在x轴、y轴和z轴方向上受到的t时刻力的大小,包含上一时刻力的大小以及固定摩擦力;和分别表示第i轴斗臂在x轴、y轴和z轴方向上的固定摩擦系数。
49.根据牛顿动力学公式,质量为mi的第i轴斗臂可以被重新写为:mi·
si=fi·
t基于上述讨论,同时针对速度变化率求导可以得到加速度。最终可以得到:经过积分后就可以获得单位时间内需要n轴斗臂的移动距离di。
50.s3:根据计算轨迹执行作业,并实时监测反馈作业环境直至绝缘斗臂车的斗臂到达设定位置。
51.任意选择存在机器人机械臂操作轨迹集合中的任一轨迹作为执行轨迹,并选择其对应关联的斗臂执行位姿、斗臂轨迹以及绝缘斗臂车停放位姿作为最终作业轨迹。
52.根据最终作业轨迹作业;实时监测反馈作业环境,与三维空间模型比较;当实时监测数据与三维空间模型出现偏差时,计算实时监测数据与最终作业轨迹的距离,若距离小于安全距离阈值,则告警,否则继续检测反馈作业环境,直至绝缘斗臂车的斗臂到达设定位置。
53.根据实时监测数据调整,保证实际运行轨迹不会与环境中的物体发生碰撞。避免周围环境发生突变(如有动物闯入)而影响作业。
54.本实施例方案以作业点位置为目标,分别计算绝缘斗臂车停放位姿、斗臂轨迹和操作轨迹,使其能够精准得到达目标位置进行操作;分别计算轨迹,确保在每个细微轨迹的运动过程中均不会发生碰撞、干涉。
55.应理解,实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1