一种可伸缩的智能机器人的制作方法
1.本实用新型涉及智能机器人的技术领域,尤其涉及一种可伸缩的智能机器人。
背景技术:
2.随着科技的不断发展,智能机器人逐渐普及,越来越多的智能机器人应用在各行各业,为人民的生活与工作提供便利。其中一种常见的机器人是自闭症筛查机器人,用于引导自闭症孩童沟通以及对孩童进行分析和诊断。
3.为了提高智能机器人的分析能力和活动能力,会在智能机器人中增设各种不同的机械部件、电子传感器、自动控制系统以及计算机模块等设备。但增设的部件越多,机器人的体积也越大。
4.由于机器人体积增大,在空置时占用空间多,需要用户额外寻找空置地方,不方便用户收纳;在使用时容易和儿童发生碰撞,不但增加儿童受伤风险,也增加机器人损坏的概率。
技术实现要素:
5.本实用新型提出一种可伸缩的智能机器人,所述智能机器人可以进行关节伸缩,从而可以缩减机器人体积,方便用户收纳使用。
6.本实用新型实施例的第一方面提供了一种可伸缩的智能机器人,包括:机器人本体,所述机器人本体设有外关节件与内关节件,所述内关节件嵌套设置在所述外关节件中;
7.所述内关节件的顶面设有通电线圈,所述内关节件的内腔设有供电电源,所述供电电源与所述通电线圈连接,所述外关节件的内腔设有磁体,所述供电电源给所述通电线圈通道,供所述通电线圈产出与所述磁体相同或相反磁性,以带动所述外关节件远离或靠近所述内关节件。
8.在第一方面的一种可能的实现方式中,所述内关节件表面设有导向槽,所述外关节件的内腔设有导向柱,所述导向柱设置在所述导向槽内,以使所述外关节件沿所述导向槽方向在所述内关节件往返伸缩移动。
9.在第一方面的一种可能的实现方式中,所述供电电源设有双刀双掷开关,所述通电线圈设有两个电流输入口与两个电流输出口,所述供电电源通过所述双刀双掷开关与所述通电线圈连接。
10.在第一方面的一种可能的实现方式中,所述机器人本体还设有多个传感器与多个摄像头,所述多个传感器和所述多个摄像头分别设置在所述机器人本体的表面。
11.在第一方面的一种可能的实现方式中,所述机器人本体的底部还设有机械腿和第一电机,所述第一电机与所述机械腿连接。
12.在第一方面的一种可能的实现方式中,所述机械腿的底部设有第二电机和底座,所述第二电机与所述底座连接。
13.在第一方面的一种可能的实现方式中,所述底座的底面设有防滑层。
14.在第一方面的一种可能的实现方式中,还包括训练桌,所述底座固定在所述训练桌上。
15.在第一方面的一种可能的实现方式中,所述机器人本体的躯干还设有转轴与转动电机,所述转动电机与所述转轴连接。
16.在第一方面的一种可能的实现方式中,所述机械人本体的表面设有缓冲海绵或橡胶垫。
17.相比于现有技术,本实用新型实施例提供了一种可伸缩的智能机器人,其有益效果在于:本实用新型可以通过控制通电线圈的电流导通方向,从而产生与磁体相同或相反的磁性,通过相同或相反的磁性可以实现伸展与收缩的效果,在空置时可以缩减机器人占用的空间,方便用户收纳,同时在使用时也可以减少机器人的体积,降低与儿童发生碰撞的机率,不但降低了儿童受伤风险,也降低机器人损坏的概率,增加机器人的使用寿命。
附图说明
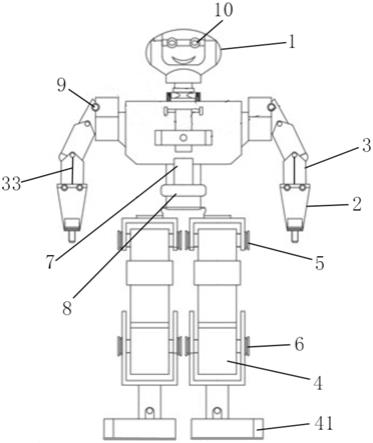
18.图1是本实用新型一实施例提供的一种可伸缩的智能机器人的结构示意图;
19.图2是本实用新型一实施例提供的一种内关节件的结构示意图;
20.图3是本实用新型一实施例提供的一种外关节件的结构示意图;
21.图4是本实用新型一实施例提供的一种训练桌的结构示意图;
22.图5是本实用新型一实施例提供的供电电源与通电线圈的电路原理图。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.由于目前常见的机器人体积增大,在空置时占用空间多,需要用户额外寻找空置地方,不方便用户收纳,而且在使用时容易和儿童发生碰撞,不但增加儿童受伤风险,也增加机器人损坏的概率。
25.为了解决上述问题,下面将通过以下具体的实施例对本技术实施例提供的一种可伸缩的智能机器人进行详细介绍和说明。
26.参照图1-3,示出了本实用新型一实施例提供的一种可伸缩的智能机器人的结构示意图、本实用新型一实施例提供的一种内关节件的结构示意图和本实用新型一实施例提供的一种外关节件的结构示意图,在本实施例中,所述可伸缩的智能机器人可以包括:机器人本体1,所述机器人本体1设有外关节件2与内关节件3,所述内关节件3嵌套设置在所述外关节件2中;
27.所述内关节件3的顶面设有通电线圈31,所述内关节件3的内腔设有供电电源32,所述供电电源32与所述通电线圈31连接,所述外关节件2的内腔设有磁体21,所述供电电源32给所述通电线圈31通道,供所述通电线圈31产出与所述磁体21相同或相反磁性,以带动所述外关节件2远离或靠近所述内关节件3。
28.具体地,在实际操作中,当需要收缩外关节件2与内关节件3时,供电电源32给通电
线圈31通电,通电线圈31在磁感应作用下产生与磁体21相反的磁场,在异性相吸的作用下,通电线圈31可以吸附外关节件2的磁体21,使得外关节件2可以向内关节件3方向移动,让外关节件2与内关节件3叠加在一起,实现外关节件2与内关节件3收缩的效果。同理,当供电电源32给通电线圈31提供反向电流时,让通电线圈31产生与磁体21相同的磁场,在同性相斥的作用下,使得外关节件2远离内关节件3,让外关节件2与内关节件3分开,实现外关节件2与内关节件3伸展的效果。
29.在可选的实施例中,可以设有四个外关节件2与四个内关节件3,其中一个外关节件2与一个内关节件3组合形成一个机械臂,共设置两个机械臂,然后再用一个外关节件2与一个内关节件3组合形成一个机械腿,共设置两个机械腿。使得机器人的机械腿和机械臂均可以实现伸缩。
30.为了进一步提高伸缩效果,也可以使用一个外关节件2与一个内关节件3组合形成一个机器人的躯干,实现躯干伸缩的效果。
31.为了能提高伸缩效果,外关节件2与内关节件3可以采用绝缘的高分子材料或有机材料。
32.在伸缩过程中,为了能让内关节件3与外关节件2整齐地叠加或分开,参照图1-3,在所述内关节件3表面设有导向槽33,所述外关节件2的内腔设有导向柱22,所述导向柱22设置在所述导向槽33内,以使所述外关节件2可以按照所述导向槽33方向在所述内关节件3往返伸缩移动。
33.在实际操作中,为了方便用户使用,该智能机器人设置在训练桌11上,在训练桌11上与用户进行互动交流,同时也方便用户存放。参照图4,示出了本实用新型一实施例提供的一种训练桌的结构示意图。智能机器人可以设置在训练桌11上。
34.在实际操作中,为了让供电电源32可以改变通电线圈31的电流方向,使得通电线圈31可以产生不同磁性的磁场,参照图5,示出了本实用新型一实施例提供的供电电源32与通电线圈31的电路原理图。所述供电电源32设有双刀双掷开关,所述通电线圈31设有两个电流输入口与两个电流输出口,所述供电电源32通过所述双刀双掷开关与所述通电线圈31连接。
35.为了提高机器人本体1移动的效率,在所述机器人本体1的底部还可以设有机械腿4和第一电机5,所述第一电机5与所述机械腿4连接。
36.具体可以通过第一电机5带动机械腿4上升和下降,从而控制机器人本体1走动。
37.为了提高机器人本体1移动时的稳定性和平衡能力,在所述机械腿4的底部设有第二电机6和底座41,所述第二电机6与所述底座41连接。
38.第一电机5与第二电机6可以同步启动,在第一电机5带动机械腿4上升或下降,第二电机6同时控制底座41上升或下降。
39.为了让机器人本体1在训练桌上固定得更加稳定,所述底座41的底面设有防滑层。具体地,底座41可以固定在训练桌11上。
40.在实际使用时,机器人本体1需要对不同方位的用户提供服务,为了提高机器人本体1的实用性和灵活性,在所述机器人本体1的躯干还设有转轴7与转动电机8,所述转动电机8与所述转轴7连接。
41.通过转动电机8带动转轴7转动,从而实现躯干转动的效果。
42.另外,为了降低因碰撞对机器人本体1产生的影响,在所述机械人本体的表面设有缓冲海绵或橡胶垫,可以通过缓存海绵与橡胶垫可以缓冲碰撞对机器人本体1以及用户的冲击力。
43.由于机器人在使用过程中采集周边的用户与环境数据,为了提高采集效果,所述机器人本体1还设有多个传感器9与多个摄像头10,所述多个传感器9和所述多个摄像头10分别设置在所述机器人本体1的表面。
44.在本实施例中,本实用新型实施例提供了一种可伸缩的智能机器人,其有益效果在于:该智能机器人可以通过控制通电线圈的电流导通方向,从而产生与磁体相同或相反的磁性,通过相同或相反的磁性可以实现伸展与收缩的效果,在空置时可以缩减机器人占用的空间,方便用户收纳,同时在使用时也可以减少机器人的体积,降低与儿童发生碰撞的机率,不但降低了儿童受伤风险,也降低机器人损坏的概率,增加机器人的使用寿命。
45.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1