闭门辅助装置的制作方法
1.本发明涉及一种门的关闭辅助装置,具体地说,是一种关闭室内旋转门或称铰链门的带拉回和阻尼功能的闭门辅助装置,其通过将门拉入门框来辅助门的关闭操作。
背景技术:
2.近年来,在建筑物和房间的出入口,室内旋转门或称铰链门上安装闭门器,使被打开的门能缓慢自动关闭的案例越来越多。在一般已知的闭门器中,门框的上框和门的上端通过连接臂连接,门的开闭操作由弹簧和液压的作用来控制。但是,安装了这样的闭门器后,门的开闭往往会感觉很沉重,支撑门的铰链合页不断地被加载,这可能会造成门开闭时铰链合页安装部分产生异常噪音或铰链合页发生损坏等问题。
3.对此,专利文献1等提出了一种闭门辅助装置,其包括:装置主体,其连接在门框和相对于门框可转动地设置的门的其中一个上;以及触发器,其连接在门框和门中的另一个上,当门被关闭时,与触发器卡合的装置主体的拉入臂在此过程中转动,从而将门拉到门框上。
4.与现有闭门器不同的是,这种结构的闭门辅助装置没有连接门框和门的连接臂,仅是在门快要接近关门位置的区域对门的移动进行控制。因此,如果将打开着的门手动关闭到一定程度,门就可以像被以往的闭门器作用一样,慢慢地自动关闭,由于整个门的开闭运动不受控制,所以门的开闭可以比较轻巧。此外,由于这种情况下给予铰链合页的负荷较小,所以在开关门时,出现异常噪音或铰链合页发生损坏的可能性就较小。
5.专利文献1:日本专利特开2010-95979号公报
6.但是,在上述专利文献1的闭门辅助装置中,装置主体固定安装在门框的上框,触发器固定安装在门的上端部,通过将设置在触发器上的触发器轴卡合在设置在装置主体上的拉入臂的卡合槽,来控制门的开闭动作。
7.不过,由于门框、门的尺寸误差、闭门辅助装置的各部件的尺寸误差、装置主体安装到门框上的安装位置误差、以及触发器安装到门上的安装位置误差等,有时触发器轴不能顺畅地与引入臂的卡合槽卡合。在这种情况下,需要将已经安装了的触发器或装置主体取下,对触发器或装置主体的安装位置进行调整,直到能够让触发器轴和拉入臂的卡合槽顺畅卡合为止,而该调整操作非常麻烦,需要花很多时间和精力。
8.为此,本发明要解决的技术课题,就是在通过使安装在门框和转动式门的一方上的装置主体的拉入臂与安装在另一方上的触发器的卡合部件卡合,来辅助门的关闭动作的闭门辅助装置中,能够在三维方向上容易地调整触发器的卡合部件的位置。
技术实现要素:
9.为了解决上述问题,本发明的闭门辅助装置,由装置主体和触发器构成,装置主体安装在门框和门之中的一个上,触发器则安装在另一个上,门被设置为可相对于门框转动,所述装置主体包括主体箱体和拉入臂,该拉入臂可转动地支承在所述主体箱体上且可与所
述触发器卡合,在所述门被关闭时,通过在该过程中与所述触发器卡合的装置主体的拉入臂的转动,将所述门拉至门框上,所述触发器包括底座部件和滑动部件以及触发器主体,所述底座部件,其位置可沿左右方向调整地安装在所述门或门框上,所述滑动部件,其位置可沿上下方向移动地安装在所述底座部件上,所述触发器主体,其位置可前后方向移动地安装在所述滑动部件上,所述触发器主体上固定有与所述装置主体的拉入臂卡合的卡合部件。
10.根据上述构成,由于触发器的底座部件的位置可沿左右方向进行调整,而滑动部件的位置相对于底座部件可沿上下方向进行调整,且触发器主体的位置相对于滑动部件可沿前后方向进行调整,因此,通过这样的组合,可以容易地在三维方向上对固定在触发器主体上的与装置主体的拉入臂卡合的卡合部件的位置进行调整。
11.此时,触发器的具体结构,作为所述触发器的底座部件,其具有左右方向延伸的横长孔,利用穿过该横长孔的触发器固定螺钉,该底座部件被安装在门或门框上,仅通过松动该触发器固定螺钉,便可对底座部件相对于门或门框的安装位置在左右方向上进行调整。
12.另外,所述滑动部件,采用的是这样的结构,即在底座部件和滑动部件中的一者上设有纵长孔,而在另一者上设有与所述纵长孔重合的通孔,通过穿过所述纵长孔和通孔的上下调整螺钉以及与该上下调整螺钉螺合的上下调整螺母,所述滑动部件被安装在所述底座部件上,所述上下调整螺母固定在所述通孔的周缘上,这样一来,就能将滑动部件的位置相对于底座部件沿上下方向进行调整。
13.而且,所述触发器的触发器主体包括安装部件、支撑部件和前后调整螺钉,所述安装部件不能在前后方向移动地被安装在所述滑动部件上,所述支撑部件上固定有所述卡合部件,所述前后调整螺钉不能在前后方向移动但可转动地保持在所述安装部件上且与所述支撑部件螺合,通过所述前后调整螺钉的转动,所述支撑部件在前后方向上移动。这样一来,所述触发器的触发器主体相对于滑动部件可在前后方向上进行位置调整。
14.本发明的闭门辅助装置,如上所述,与装置主体的拉入臂卡合的触发器的卡合部件,其位置可容易地在三维方向上进行调整,因此,在设置装置主体和触发器时,即使发生触发器的卡合部件与拉入臂的卡合出现偏差,也可只对触发器的卡合部件进行简单的位置调整,就可以对卡合部件与拉入臂的卡合状态进行矫正。
附图说明
15.图1是表示本实施方式的闭门辅助装置设置状态的立体示意图
16.图2是表示图1中的闭门辅助装置的横截面俯视图(处于关门过程中的状态)
17.图3是表示图1中的装置主体的分解立体图
18.图4中(a)是表示图3中的拉入臂的装配状态下的立体图,(b)是表示沿(a)中的iv-iv线的剖视图
19.图5是表示放大显示图2中的装置主体的主要部分的横截面俯视图
20.图6是显示出拉入臂在对应于图5中的拉入方向上转动的状态的横截面俯视图
21.图7是表示与图2相对应,显示闭门辅助装置在门关闭时上的状态的横截面俯视图
22.图8是说明图2中的臂压弹簧的推压力的调整方法的横截面俯视图
23.图9是由下而上显示图8所示的臂压弹簧的推压力调节操作的立体图
24.图10(a)和(b)分别是表示当拉入臂处于拉入位置时,门关闭时的动作说明图
25.图11是沿图7中的xi-xi线的剖面图
26.图12是沿图11中的xii-xii线的剖面图
27.图13是从正面看图1中的触发器的分解立体图
28.图14是从背面看图13的触发器要部的分解立体图
29.图15是从背面看图13的触发器在组装途中的分解立体图
30.图16(a)是图1中的触发器处于标准位置时的主视图
31.图16(b)和(c)分别是对从图16(a)的状态将触发器轴的位置在左右方向及上下方向上调整的方法进行说明的主视图
32.图17是对应于图11对将触发器轴的位置在前后方向上调整的方法进行说明的主视图。
具体实施方式
33.下面根据图纸对本发明的实施方式进行描述。
34.如图1所示,本实施方式的闭门辅助装置安装在开启和关闭房屋的房间门口的铰链门d上,其由安装在设置于门洞的门框f的上梃上的装置主体1和安装在门d上端的触发器31组成,该门d是通过铰链(图示省略)可转动地设置在门框f的一个竖框上。门框f在与铰链相对的上角处设有一个没有门挡s的部分,装置主体1被安装在这个部分上。在下面的描述中,将装置1主体的面对门框f的另一竖框的一侧称为一端侧,将相反的一侧称为另一端侧。
35.如图2和图3所示,该装置主体1具备:主体箱体2,其由金属制成的上箱体2a和下箱体2b组成;拉入臂3,其可与后述的触发器31a卡合,可转动地被支撑在所述主体箱体2内;推压机构4,其将拉入臂3在该拉入臂3的转动平面上进行推压;制动机构5,其对拉入臂3的转动进行制动。
36.主体箱体2通过将拉入臂3、推压机构4和制动机构5内置在上箱体2a和下箱体2b里后通过多个箱体固定螺钉6结合在一起形成的。然后,主体箱体2是通过多个穿透整个箱体的箱体固定螺钉7(图3中省略)以其长度方向与门框f的上框平行的方式连接在门框f的上框的下表面上,并使拉入臂3可从正面的开口(面向关闭的门d的表面)插入和取出。箱体固定螺钉6从上箱体2a的上侧拧入固定在下箱体2b上的圆柱形箱体垫套8,箱体安装螺钉7以穿过布置在上箱体2a和下箱体2b之间的圆柱形安装螺钉垫套9的状态拧入门框f的上梃。
37.如图4(a)图4(b)所示,拉入臂3包括:臂体10,其后端可转动地支撑在主体箱体2上,而前端与触发器31卡合;滑块11,其俯视呈三角形,被组装在臂体10的前端;滑片压簧12,其将滑块11向臂体10的后端推压。该臂体10和滑块11由树脂制成。
38.臂体10的前端上设有滑片引导部10a,其在臂体10的宽度方向的一侧为俯视呈梯形的平板状,其引导滑块11沿臂体10移动。另外,滑片引导部10a具有在臂体10的长度方向上延伸并容纳滑片压簧12的弹簧套10b。
39.滑块11具备:狭缝11a,其俯视呈三角形,其位于滑块11的上下方向的中央位置,在朝向臂体10的宽度方向中央的侧面和朝向臂体10的后端的侧面有开口,滑片引导部10a的一部分插入其中;弹簧保持孔11b,其从朝向臂体10前端的侧面(狭缝闭合面)延伸到与弹簧套10b重叠的位置。当将滑块11装配到臂体10上时,将滑片压簧12置于臂体10的弹簧套10b
中,并将滑块11从臂体10侧面的狭缝11a面对滑片引导部10a的位置插入到弹簧保持孔11b容纳滑片压簧12的位置。需要将滑块11从狭缝11a面对臂体10侧的滑片引导部10a的位置推送,同时使其弹性变形,直到弹簧保持孔11b夹住滑片压簧12。
40.组装在臂体10上的滑块11被滑片压簧12压在弹簧保持孔11b的底面上,使其向臂体10的后端推压,狭缝闭合面的壁与滑片导向部10a接触,使其向臂体10的后端移动受到限制。因此,当滑块11在压缩滑片压簧12的方向上受力时,在滑片压簧12和滑片引导部10a的引导下,向臂体10的前端滑动(参照10(a)、图10(b))。
41.通过这种滑块11的装配,拉入臂3在臂体10的前端的底部形成有后述的用于与触发器31卡合的卡合槽3a。卡合槽3a具有直线部,其沿长度方向延伸,其一端开口于拉入臂3的后端;引入部,其从直线部的另一端开口于拉入臂3的前端。
42.另一方面,臂体10的后端分别设有:一对转动轴部10c,其可转动地插入主体箱体2的转动轴孔2c中;和一对受压部10d,其支撑配置于上下方向上的受压销13的两端部;以及一对连接部10e,其支撑同样配置于上下方向上的连接销14的两端部。
43.臂体10绕转动轴10c的转动是通过从主体箱体2的上下表面向内凸出的挡板2d和靠近主体箱体2一端(图2中的左端)的箱体垫套8来调节的,从而使拉入臂3可以在与门d的打开状态相对应的待机位置和与门d的关闭状态相对应的拉入位置之间转动。而且,挡板2d被设计成与相对于臂体10的转动中心长距离延伸的前端相同一侧接触,以防止臂体10弯曲。另外,在转动轴部10c的周围形成有环形槽,在环形槽中嵌合有对转动轴孔2c的外周缘进行去毛刺加工形成的向内的环形凸部,并保持有未图示的润滑材料,使拉入臂3能够稳定地转动。
44.臂体10的受压部10d通过受压销13和可滑动地嵌合在受压销13的轴向中央部的受压辊15来承受来自推压机构4的推压力。另外,连接部10e通过连接销14和在一端上开有让连接销14的轴向中心部穿过的孔的呈条形的连接件16与制动机构5连接。
45.推压机构4上设有沿装置主体1的纵向布置的臂压弹簧17、分别夹持臂压弹簧17两端的第一弹簧箱18和第二弹簧箱19,将第二弹簧箱19定位在臂压弹簧17的中心线方向上的凸轮部件20。臂压弹簧1 7通过第一弹簧箱18压住连接在拉入臂3上的受压辊15,从而促使拉入臂3在其转动平面上转动。
46.在第一弹簧箱18中,臂压弹簧17的一端插入面向第二弹簧箱19一侧的面上设置的弹簧插入孔18a中,第一弹簧箱18的另一侧所设的推压面18b与拉入臂3的受压辊15接触。另一方面,在第二弹簧箱19中,臂压弹簧17的另一端插入面向第一弹簧箱18一侧的面上设置的弹簧插入孔19a中,第二弹簧箱19的另一侧所设的倾斜凸轮面19b与凸轮部件20接触。另外,两个弹簧箱18、19的上下表面上分别形成的条状的突起18c、19c,均可滑动地分别嵌入在沿主体箱体2的长度方向延伸的上、下导向槽2e1、2e2中。
47.凸轮部件20具有与第二弹簧箱19的倾斜凸轮面19b平行滑动接触的倾斜凸轮面20a,其上下表面形成的矩形板状突起20b分别可滑动地嵌入沿主体箱体2的宽度方向延伸的上、下导向槽2f中。然后,在其前后方向(主体箱体2的宽度方向)贯穿凸轮部件20的弹簧调节螺钉21与调节螺母22螺接,该调节螺母22不可转动地收纳在与凸轮部件20的倾斜凸轮面20a相反侧表面上开口的中空部中。弹簧调节螺钉21装在主体箱体2内,其前端与在靠近装置主体1的另一端配置的上述用于安装螺钉的垫套9的外圆周面接触,其头部穿过俯视看
呈l形的螺钉座23的短边部,并可通过在主体箱体2的前表面上开的孔,在主体箱体2的宽度方向从外部对其进行转动。
48.所述制动机构5,具有沿装置主体1的长度方向布置的直动式阻尼器24、在轴向对阻尼器24的筒部24a进行固定的阻尼器支架25、与阻尼器24的轴24b的端部卡合的u形阻尼器盖26、以及布置在阻尼器24的筒部24a底部与阻尼器支架25之间的缓冲弹簧27。阻尼器24通过阻尼器盖26和连接件16控制拉入臂3的转动。阻尼器24,其轴部24b缩回筒部24a内时的阻力和伸出筒部24a外时的阻力调整为大致相同。
49.阻尼器支架25,包括用于安装螺钉的垫套9穿过的基端部25a、以及从基端部25a延伸的与阻尼器24平行的上下臂部25b,上下臂部25b用于夹住阻尼器24的筒部24a。基端部25a在与所述凸轮部件20相对的侧壁上钻有一个孔,以便使弹簧调节螺钉21的前端与用于安装螺钉的垫套9接触。通过将形成在上臂25b的上表面和下臂25b的下表面的突起25c装入主体箱体2的定位孔2g中,对整个阻尼器支架25进行定位。
50.阻尼器盖26,具有卡合孔26a,阻尼器24的轴24b的前端插入其中。在阻尼器盖26的上、下表面上形成的多个突起部26b分别可滑动地嵌入在主体箱体2的长度方向上延伸的上、下导向槽2h中。然后,连接销28穿过u形部分的上下臂,连接销28的轴向中心部穿过所述连接件16另一端的孔,从而将阻尼器盖2 6与拉入臂3连接起来。从阻尼器盖26的上下表面突起部26b之间伸出的连接销28的两端都形成为小直径,以便与主体箱体2上的导向槽2h配合。
51.该闭门辅助装置的装置主体1具有上述结构,如图1和图2所示,主体箱体2,是以以下方式安装在门框f的上梃上的,即其一端面朝向门框f的另一竖框的上端,并稍隔间隙,且拉入臂3朝向门d出入移动。
52.另一方面,如图1和图2所示,所述触发器31具备盖子32和从盖子32的上表面伸出的触发器轴33,所述触发器31安装在门d的远离铰链一侧的上端部,以便当门d处于快接近其关闭位置的区域时,触发器轴33与装置主体1的拉入臂3中形成的卡合槽3a卡合。
53.接下来,对该闭门辅助装置的动作进行说明。首先,如图1所示,当门d打开,装置主体1的拉入臂3未与触发器31卡合时,拉入臂3保持在待机位置(从主体箱体2中拉出的状态)。拉入臂3之所以保持在待机位置,如图5所示,是由于拉入臂3的受压辊15和推压机构4的第一弹簧箱18的推压面18b相接触在直线(从平行于臂压弹簧17的推压方向的转动中心o延伸的直线)a的上侧,该直线是推压机构4相对于拉入臂3的转动中心o的平衡点集合。拉入臂3在来自推压机构4的推压力的作用下,在逆时针方向上受到力矩,逆时针转动受到主体箱体2的挡板2d的限制(参见图2)。
54.然后,当打开的门d向关闭方向转动时,在此过程中,如图2所示,触发器31的触发器轴33与装置主体1的拉入臂3的前端接触(触发器轴33的一部分进入卡合槽3a的直线部分)。此时,拉入臂3以其前端被触发器轴33推压而顺时针方向微微转动,拉入臂3的受压辊15与推压机构4的第一弹簧箱18的接触点超过推压机构4的平衡点(直线a)。
55.于是,拉入臂3在待机位置的保持被解除,如图6所示,在推压机构4的臂压弹簧17的作用力下,第一弹簧箱18向装置本体1的一端侧移动,同时,拉入臂3沿顺时针方向(拉入方向)转动。然后,触发器轴33随之相对于拉入臂3的卡合槽3a朝其直线部分的后侧移动(被拉入),门d与触发器31一起绕铰链自动转动,并被拉入门框f中。此后,如图7所示,拉入臂3
在主体箱体2内的拉入位置与箱体垫套8接触停止,门d也停止在关闭位置。
56.此时,拉入臂3从待机位置到拉入位置的转动通过连接在拉入臂3的连接部10e上的制动机构5的作用被制动的。即,当拉入臂3从待机位置顺时针转动时,拉入臂3的连接部10e通过连接销14和连接件16推压制动机构5的阻尼器盖26和阻尼器24的轴部24b,通过阻尼器24的抵抗轴部24b被缩进筒部24a的阻力,拉入臂3的转动被减速的。因此,即使用手等在关闭方向上对门d施加强力,门d也会缓慢地关闭,并且在与门框f的门挡s接触时不会产生冲击声。
57.另外,在该闭门辅助装置中,即使在关门方向上对门d施加的力较小的情况下,由于以下原理当触发器轴33接触到拉入臂3的前端时,也能确保拉入臂3在拉入方向上转动。
58.也就是说,如图5所示,作为推压机构4的与拉入臂3的接触部的第一弹簧箱18的推压面18b,由与推压机构4的推压方向正交的臂保持面18b1和与臂保持面18b1连续且朝远离拉入臂3的转动中心o倾斜的倾斜面18b2构成。臂保持面18b1在待机状态下与拉入臂3的受压辊15接触,推压机构4的平衡点(直线a)位于倾斜面18b2上靠近臂保持面18b1的位置。因此,在关闭门d的过程中,当触发器31接触到处于待机位置的拉入臂3,并使拉入臂3微微转动时,受压辊15立即与第一弹簧箱18的倾斜面18b2接触,拉入臂3转动的阻力变小。这样,与推压机构的跟拉入臂的接触面仅由与推压方向正交的面形成的情况相比,受压辊15与第一弹簧箱18之间的接触点更容易越过平衡点(直线a)。
59.另外,在对拉入臂3的转动进行制动的制动机构5中,在阻尼器24的筒部24a的右侧设置有空间,缓冲弹簧27设置在该空间内,因此,在拉入臂3向拉入方向转动的开始时,几乎不会发生阻尼器24的制动作用,由拉入臂3的连接部10e推动的阻尼器盖26和阻尼器24的轴向移动被缓冲弹簧27缓冲制动,从而降低了拉入臂3的转动阻力。
60.因此,即使在打开的门d上施加一个使触发器轴33与拉入臂3轻微地接触的力,也能解除拉入臂3被保持在待机位置的状态,并通过拉入臂3在拉入方向上的转动,可以确保门d平稳地关闭。
61.然后,如图7所示,当打开处于关闭状态的门d时,其动作与上述关闭状态的动作相反。即,当关着的门d向开启方向转动时,触发器轴33沿拉入臂3的卡合槽3a朝直线部分的前端侧移动,使拉入臂3向逆时针方向转动。此后,拉入臂3在待机位置与挡板2d接触并停止,并在该状态下被推压机构4保持。当拉入臂3停止时,触发器轴33从拉入臂3的卡合槽3a中脱离,门d相对于拉入臂3独立地转动,实现开门。
62.在本实施方式中,如图8和图9所示,在装置主体1安装在门框f上的情况下,可以用手动螺丝刀h穿过主体箱体2前面侧的孔,转动推压机构4的弹簧调节螺钉21,以调节推压机构4的推压力(图8中的箭头表示向增加推压力方向的调节操作)。
63.换句话说,弹簧调节螺钉21在轴向被主体箱体2的前壁和用于安装螺钉的垫套9固定着不能移动,与弹簧调节螺钉21螺合的调节螺母22无法转动地被收纳在凸轮部件20中。因此,当弹簧调节螺钉21转动时,调节螺母22和凸轮部件20一起在弹簧调节螺钉21的轴向上移动。同时,具有与凸轮部件20的倾斜凸轮面20a滑动接触的倾斜凸轮面19b的第二弹簧箱19沿臂压弹簧17的中心线移动。因此,改变了臂压弹簧17的压缩量,调整了推压机构4的推压力。
64.于是,如上所述,通过转动弹簧调节螺钉21的操作,来对推压机构4的推压力进行
调整,从而可以使拉入臂3从待机位置的初始动作(保持状态的解除)的灵敏度、以及拉入臂3的转动速度(门d在接近关闭位置时的开/关速度)调节成所想要的状态。
65.而且,在该闭门辅助装置中,弹簧调节螺钉21设置成与臂压弹簧17的中心线垂直,其转动操作可以在门d打开的情况下从门框f的前侧进行,因此,与弹簧调节螺钉设置成与臂压弹簧平行的情况相比,更容易进行推压力的调整。
66.在这种闭门辅助装置中,当门d打开时,拉入臂3通常被保持在待机位置,但即使拉入臂3意外地受到某种力的作用而转动被保持在拉入位置的情况下,门d也能如下面所述正常关闭。
67.即,当门d打开,拉入臂3处于拉入位置时,门d关闭时,与门d同步转动的触发器31的触发器轴33,如图10(a)所示进入拉入臂3的卡合槽3a的导入部与滑块11接触。如图10(b)所示,与滑块11接触后,滑块11进入卡合槽3a的直线部分,同时在滑片压簧1 2的弹性力的作用下,将滑块11滑动到拉入臂3的前端侧。当整个触发器轴33进入卡合槽3a的直线部分时,滑块11在滑片压簧12的弹性力的作用下回到原来的位置(图7所示的状态),门d以与平时相同的方式关闭。
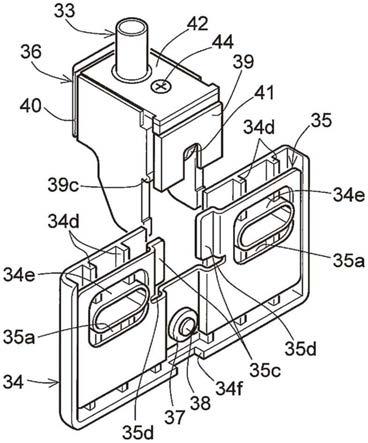
68.以下,就触发器31的详细结构以及其触发器轴33的位置调整方法进行说明。触发器31,如图11及图12所示(省略所述的盖子32),包括安装在门d上的底座部件34,和安装在该底座部件34上的滑动部件35,和与装置主体1的拉入臂3卡合的作为卡合部件的触发器轴33以及安装在所述滑动部件35上的触发器主体36。
69.如图13及图15所示,所述底座部件34,是一个从正面看呈横倒的u字形的板状部件,在其上边开口的矩形切槽34a的左右两侧开有在左右方向上延伸的横长孔34b,而在切槽34a的下侧开有在上下方向上延伸的纵长孔34c。另外,在左右两边缘及下侧缘有往后面一侧弯曲的弯曲缘部,在后面设有多个上下方向的筋条34d和环状突起34e,所述筋条34d其高度比所述弯曲缘部低,所述突起34e以与弯曲缘部基本上一样高地从各横长孔34b的周缘突出。另外,在下侧的边缘部,形成有用于与盖子32的突起(未图示)卡合的切槽34f。
70.滑动部件35,是具有与底座部件34对应的主视图形状的金属板,其厚度小于底座部件34的左右两侧及下侧的边缘部的高度与筋条34d的高度之差,在其左右两侧部开有略呈矩形的窗口35a,该窗口35a供底座部件34的后面侧的环状突起34e插入。于是,滑动部件35,从底座部件34的后面侧装入,被底座部件34的左右的弯曲缘部及筋条34e导向可在上下方向移动,而受底座部件34的环状突起34e及下边的弯曲缘部的限制不能在上下方向上拔出。
71.该滑动部件35的宽度方向中央部,为在从底座部件34的切槽34a的下缘向下方延伸的2根筋条34d之间朝前面一侧稍微突出的阶梯部,开有与底座部件34的纵长孔34c重合的通孔35b。于是,在该通孔35b上从后面一侧固定有上下调整螺母37,在将滑动部件35组装到底座部件34的后面一侧的状态下,通过将上下调整螺钉38从底座部件34的前面一侧穿过纵长孔34c螺合在上下调整螺母上,滑动部件35便可以上下调整地安装在底座部件34上。
72.另外,在滑动部件35的左右两侧部,形成有安装片35c和卡合槽35d。该安装片35c,在滑动部件35的宽度方向中央的切槽的边缘朝前面一侧稍微突出而拱出着,而该卡合槽35d则从该切槽朝窗口35a延伸。通过这些安装片35c和卡合槽35d就如后述一样让触发器主体36可拆卸地安装。
73.触发器主体36,如图14所示,包括:安装在滑动部件35上的安装部件39,和固定有触发器轴33的支撑部件40,和被该安装部件39保持从而与支撑部件40螺合的前后调整螺钉41,以及用于支撑部件40的上盖42和下盖43。
74.该触发器主体36的安装部件39,为俯视方向看在前方开口略呈横倒u字形且主视方向看在下方开口略呈横倒u字形的树脂部件。于是,在其左右两侧的手腕部的内侧面上,形成有对支撑部件40导向的水平方向的导向槽39a,在连接两个手腕部的一端部的两侧面上,形成有供滑动部件35的安装片35c卡入的安装槽39b,各安装槽39b的下端部上,设有卡入滑动部件35的卡合槽35d的卡合片39c。另外,所述一端部,将前后调整螺钉41的头部不能在前后方向上移动但可以转动地保持在下方及前后开口的凹部39d中,可以从后面一侧对前后调整螺钉41进行转动操作。另外,在两手腕部的上面,分别设有后述的为防止往支撑部件40的前方拔出的带状突部39e。
75.另一方面,触发器主体36的支撑部件40,除了矩形板状的前面部分,整体呈卡入安装部件39的内侧的形状,其两侧面上设有卡入安装部件39的导向槽39a内可自由滑动的导向部40a,在后端面上开有供前后调整螺钉41螺入的螺孔40b。另外,在中央部,设有用于固定触发器轴33的上下方向的贯通孔40c,在后端部的上面设有用于固定上盖42及下盖43的螺孔40d。
76.上盖42及下盖43,分别为略呈矩形的平板状部件,除了开有供触发器轴33及盖固定螺钉44穿过的孔以外,还设有从后端部突出于两侧的侧方向的突起42a、43a。
77.触发器轴33,包括:用树脂制成的呈筒状部件的轴体45、和插入轴体45的轴芯46、和卡入轴体45的下半部外周的呈筒状的触发器轴用套筒47。该轴体45,形成有从下端面沿轴向延伸的多个槽45a,同时在下端面的内周面上,设有与槽45a垂直的不连续的环状突起45b。于是,通过从轴体45的上端侧将轴芯46压入,轴体45的下端部一旦扩径以后,其环状突起45b便卡入轴芯46的下端部设置的环状槽46a,轴体45便与轴芯46成为一体。另外,在轴体的轴向中央部,设有防止轴体45从触发器轴用套筒47拔出的锷部45c。
78.而且,轴体在本实施例中,虽然通过在下端部开设槽来使得轴芯的插入固定能容易实施,但不要槽,让外面呈上下对称的形状也是可以的。做成上下对称的形状时,虽然轴芯的插入固定的操作稍微差些,但可以防止组装时的上下方向装错,而且长时间使用发生问题时还可以上下颠倒后使用。
79.另外,触发器轴用套筒47,在打开门d时触发器轴33为了能准确地将拉入臂3拉出到待机位置,起着抑制与拉入臂3卡合的触发器轴33的左右前后摇摆的作用。这样一来,如果把触发器轴用套筒47用树脂来制造,那么比用金属来制造,其与触发器轴33的摩擦就会变小,触发器轴33自在地转动,与拉入臂3的卡合也变得圆滑。
80.该触发器主体36的组装,首先,在将前后调整螺钉41的头部保持在安装部件39的凹部39d里的状态下将支撑部件40从前面一侧卡入安装部件39,转动前后调整螺钉41将其螺合到支撑部件40的螺孔40b中。其后,从上方将触发器轴33插入支撑部件40的贯通孔40c中。此时,由于触发器轴用套筒47的下端部与在贯通孔40c的下端近旁的内周形成的阶梯部抵接,而轴体45的锷部45c与触发器轴用套筒47的上端面抵接,触发器轴33便无法被拔出。这样一来,按顺序盖上中盖43和上盖42,然后从上盖42的上面一侧将盖固定用螺钉44拧入支撑部件40的螺孔40d就可以了。
81.另外,将这样组装好的触发器主体36安装到滑动部件35上时,如图15所示那样,将触发器主体36的后端部放在滑动部件35的宽度方向中央部的上方,然后让安装部件39一边弹性变形一边将其压入滑动部件35中,滑动部件35的安装片35c进入安装部件39的安装槽39b中,安装部件39的卡合片39c被卡入滑动部件35的卡合槽35d中就可以了。这样一来,触发器主体36便可拆卸地安装到滑动部件35上。
82.本闭门辅助装置的触发器31就是上述构成,在将底座部件34和滑动部件35以及触发器主体成为一体的状态下,将底座部件34的弯曲缘部的端面与门d抵接的基础上,将触发器固定螺钉48从前面一侧穿过底座部件34的横长孔34b以及滑动部件35的窗口35a拧到门d上,从而使得除盖子32以外的触发器的整体被安装到门d上。于是,在这个安装操作以后,将盖住前面一侧的盖子32利用在底座部件34的下边侧的弯曲缘部设置的切槽34f进行卡合。
83.本触发器31,就像下述一样,在安装在门d的状态(取下盖子32的状态)下,可以对触发器轴33的位置进行三维方向的调整。
84.即,如图16(a)所示,触发器31在标准位置被安装到门d上时,只要松开2颗触发器固定螺钉48,整个触发器31就可以在底座部件34的横长孔34的长度尺寸范围内相对于门d进行左右方向的移动。从图16(a)的状态将整个触发器31往左方向移动后的状态就如图16(b)所示。这样松开触发器固定螺钉48将整个触发器在左右方向移动以后,再拧紧触发器固定螺钉48,便可以对触发器轴33的左右位置进行调整。
85.另外,从图16(a)的状态松开上下调整螺钉38,滑动部件35便能与触发器主体36一起相对于底座部件34在上下方向上移动。从图16(a)的状态让滑动部件35及触发器主体36在上下方向上移动后的状态就如图16(c)所示。这样松开上下调整螺钉38让滑动部件35及触发器主体36在上下方向上移动以后,再拧紧上下调整螺钉38,便可以对触发器轴33的上下位置进行调整。
86.另一方面,对触发器轴33的前后方向位置进行调整时,首先,将触发器主体36从滑动部件35上取下,该取下操作,与上述安装操作相反,安装部件39的卡合片39c从滑动部件35的卡合槽35d中卸出,滑动部件35的安装片35c从安装部件39的安装槽39b中拔出,一边让安装部件39弹性变形一边使其上拔即可。于是,如图17所示,从取下的触发器主体36的后面一侧用螺丝刀旋动操作前后调整螺钉41。这样一来,由于前后调整螺钉41被保持为相对于安装部件39不能在轴向移动,因此,螺合在前后调整螺钉41上的支撑部件40便在前后调整螺钉41的轴向及前后方向上移动(图17中的箭头表示使支撑部件40往后退方向的调整动作)。这样一来,让固定在支撑部件40上的触发器轴33的相对于安装部件39的前后方向位置变化以后,再将触发器主体36安装到滑动部件35上,便可对触发器轴33的前后方向位置进行调整。
87.而且,让触发器轴33往前移动时,即使错将前后调整螺钉41过度旋动,在支撑部件40与前后调整螺钉41的螺合被接触之前,上盖42及中盖43的两侧的突起42a、43a分别与安装部件39的上部的带状突部39e抵接而使得支撑部件40停止,从而不会发生支撑部件40从安装部件39拔出或前后调整螺钉41脱落的情况。
88.本闭门辅助装置,如上所述,作为触发器31,采用包括左右方向位置可调地安装在门d上的底座部件34,和上下方向位置可移动地安装在该底座部件34上的滑动部件35,和固定有与装置主体1的拉入臂3卡合的触发器轴33且前后方向位置可移动地安装在所述滑动
部件35上的触发器主体36的结构,因此,触发器轴33的相对于门d的位置可以容易地进行三维方向的调整。
89.因此,将装置主体1设置到门框f上,将触发器31设置到门d上时,即使发生触发器轴33与拉入臂3的卡合出现偏差,也可只对触发器轴33进行简单的位置调整,就可以对触发器轴33与拉入臂3的卡合状态进行矫正。
90.本实施方式所披露的所有内容都是示例性的,本发明的范围不限于此,可以在适当的范围内进行变更。
91.例如,在上述实施方式中,装置主体安装在门框上,触发器安装在门上,但可以反过来,让装置主体安装在门上,触发器安装在门框上。
92.另外,触发器,在实施例中为了进行上下方向的位置调整在底座部件上开设了纵长孔,在滑动部件上开设了于纵长孔重合的通孔,其纵长孔和通孔反过来设置也可以。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1