面向水果采摘的刚柔耦合绳驱动外肢体机器人
1.本发明涉及机器人技术领域,尤其是一种面向水果采摘的刚柔耦合绳驱动外肢体机器人。
背景技术:
2.近年来,随着科技的不断发展,人们对生活和生产有了进一步的需求,应用于各种场景的机器人应运而生。为提高工作效率及降低作业人员劳动强度,外肢体机器人因其便携性及高效性研究备受关注。对于现阶段的水果采摘,传统机器易对水果造成损坏,水果良品率低;人工采摘虽能保证水果的良品率,但其劳动强度大,工作效率低。且某些果树位于山地或种植密度大时,大型采摘设备无法进入,此时,外肢体机器人因其便携性能够保证操作者完成采摘、抓取、固定等辅助动作,在面对较高果树时,能使操作者不借助其他工具进行水果采摘,能够有效提高水果的良品率及人员工作强度。同时,在辅助装配、康复保健等领域也拥有广阔的应用前景,对于复杂的装配任务单人无法完成的情况下,外肢体机器人能够协助完成工作,以及对于肢体运动功能不全的人,能够完成取物、支撑等日常辅助动作。
3.现有的外肢体机器人结构中,功能方面还是显得比较单一,比如一种可穿戴气动柔性外肢体机器人,是一种可以辅助人们抓取物体的机器人,但该机器人只有一个机械臂,难以应对复杂多变的应用场景,且该机器人为柔性材料易损坏,不利于后期检修维护;还有如一种人体运动辅助两用式外肢体机器人,该机器人能提供上肢辅助和下肢辅助,但其只能实现简单基础操作,难以应对多任务复杂场景。
技术实现要素:
4.本发明要解决的技术问题是克服现有技术的缺陷,提供一种面向水果采摘的刚柔耦合绳驱动外肢体机器人,它采用刚性臂和连续型柔性臂相结合的方式,实现精确的控制及良好的柔顺性,有效提高人员工作时的作业效率。
5.为了解决上述技术问题,本发明的技术方案是:一种面向水果采摘的刚柔耦合绳驱动外肢体机器人,它包括背部支撑板、穿戴装置、电源装置和两个机械臂,所述穿戴装置连接在所述背部支撑板上,用于穿戴于人体,所述电源装置用于供电;所述机械臂包括:
6.机械臂座,安装在所述背部支撑扳上;
7.机械臂本体,包括依次连接的刚性大臂、刚性小臂和连续型柔性臂,所述刚性大臂的首端连接在所述机械臂座上;
8.机械爪,安装在所述连续型柔性臂的末端;
9.驱动装置,安装在所述背部支撑板上,分别通过绳索连接所述刚性大臂、所述刚性小臂和所述连续型柔性臂,用于驱动所述刚性大臂、所述刚性小臂和所述连续型柔性臂动作。
10.进一步提供了一种驱动装置的具体结构,所述驱动装置包括四个电机,每个电机
的输出轴上安装有绕线轮,每个电机的绕线轮绕有两条绕向相反的绳索,所述刚性大臂和所述刚性小臂分别可上下摆动,所述连续型柔性臂可任意方向弯曲;其中,
11.一个电机的两条绳索分别连接于所述刚性大臂的上下两侧;另一个电机的两条绳索分别连接于所述刚性小臂的上下两侧;另两个电机的四条绳索沿所述连续型柔性臂的周臂均布,并连接于所述连续型柔性臂的末端。
12.进一步为了可以有效降低机械臂运转过程中因为绳索松弛带来的运动误差,面向水果采摘的刚柔耦合绳驱动外肢体机器人还包括与所述机械臂一一对应的绳索张紧装置,所述绳索张紧装置包括导向机构和张紧机构,绳索经过所述导向机构进入所述张紧机构;其中,
13.所述张紧机构包括八个张紧组件,每个张紧组件对应一条绳索,所述张紧组件包括用于供相应绳索依次绕过的一个张紧导向轮、张紧轮和另一个张紧导向轮及作用于所述张紧轮并用于调整所述张紧轮的位置以调整所述绳索的张紧程度的调节组件。
14.进一步,所述张紧机构的八个张紧组件自上而下排列,每个张紧组件的一个张紧导向轮、张紧轮和另一个张紧导向轮在左右方向上排列,在上下方向上相邻的两个张紧组件在前后方向上错开。
15.进一步提供了一种调节组件的具体结构,所述调节组件包括:
16.螺栓,螺纹连接在一安装板上,与所述张紧轮相抵,用于通过其旋进推动所述张紧轮移动;
17.至少一个弹性元件,连接在所述张紧轮和所述安装板之间,用于在所述螺栓旋退的过程中通过其回弹带动所述张紧轮随所述螺栓退回。
18.进一步为了使得各个绳索有序,所述刚性大臂的首端通过大臂驱动轴转动安装在所述机械臂座上,所述大臂驱动轴上同轴安装有大臂驱动轮和三个第一换向定滑轮;
19.所述刚性小臂的首端通过小臂驱动轴转动安装在所述刚性大臂的末端,所述小臂驱动轴上同轴安装有小臂驱动轮和两个第二换向定滑轮;其中,
20.一个电机的两条绳索连接于所述大臂驱动轮;
21.另一个电机的两条绳索绕过相应第一换向定滑轮连接于所述小臂驱动轮;
22.另两个电机的四条绳索绕过相应第一换向定滑轮和相应第二换向定滑轮连接于所述连续型柔性臂。
23.进一步提供了一种可以扩大机械臂的自由度的机械臂座的具体结构,所述机械臂座包括:
24.固定基座,固定安装在所述背部支撑板上;
25.大臂旋转关节,旋转支承在所述固定基座上;
26.驱动电机,通过同步带与所述大臂旋转关节相连,用于驱动所述大臂旋转关节转动;其中,
27.所述刚性大臂转动安装在所述大臂旋转关节上,所述大臂旋转关节相对于所述固定基座的旋转中心线垂直于所述刚性大臂相对于所述大臂旋转关节的旋转中心线。
28.进一步,面向水果采摘的刚柔耦合绳驱动外肢体机器人还包括控制装置,所述控制装置包括:
29.编码器组,用于检测所述大臂旋转关节、所述刚性大臂和所述刚性小臂的旋转数
据;
30.弯曲传感器,用于检测所述连续型柔性臂的弯曲数据;
31.手臂肌电传感器,穿戴于人体手臂,用于获取人体手臂的运动姿态;
32.无线手柄,用于接收运动指令;
33.主控芯片,分别与所述编码器组、弯曲传感器、手臂肌电传感器和机械臂相连,用于根据所述运动姿态或运动指令实现对机械臂的运动控制;及
34.根据所述旋转数据和所述弯曲数据实现对所述大臂旋转关节及机械臂本体的运动补偿。
35.进一步为了能够对水果进行有效保护,所述机械爪的用于与水果接触的部位为硅胶柔性材质。
36.采用上述技术方案后,本发明中的机械臂采用的是刚性结构和柔性结构相结合,将刚性结构控制精度高、负载能力强等优点和柔性结构柔顺性好、较好地空间可达性等优点进行了有效结合;刚性结构能够准确到达预定采摘位置,柔性结构能够完成对水果地无损采摘,降低了作业人员在采摘水果时的工作强度,提高了采摘时的良品率;机械臂采用绳索驱动,相比于传统机械臂,有效地降低了机械臂运转时的惯性,同时也能有效地保护电机等核心部件。
附图说明
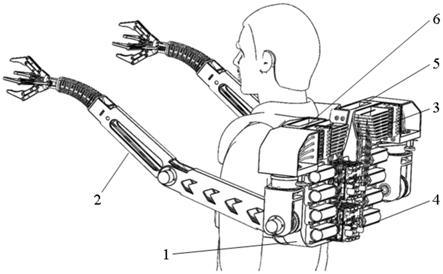
37.图1是本发明的面向水果采摘的刚柔耦合绳驱动外肢体机器人穿戴在人体上的结构示意图;
38.图2为本发明的面向水果采摘的刚柔耦合绳驱动外肢体机器人穿戴在人体上的另一视角的结构示意图;
39.图3为本发明的面向水果采摘的刚柔耦合绳驱动外肢体机器人的结构示意图;
40.图4为本发明的面向水果采摘的刚柔耦合绳驱动外肢体机器人的另一视角的结构示意图;
41.图5为本发明的一个机械臂的结构示意图;
42.图6为本发明的机械臂去掉部分部件后的结构示意图;
43.图7为本发明的机械臂的右视图;
44.图8为本发明的机械臂的内部结构示意图;
45.图9为本发明的绳索张紧装置的结构示意图;
46.图10为本发明的张紧机构的结构示意图;
47.图11为本发明的张紧机构去掉部分部件后的结构示意图;
48.图12为本发明的大臂驱动轴的结构示意图;
49.图13为本发明的小臂驱动轴的结构示意图;
50.图14为本发明的连续型柔性臂的结构示意图;
51.图15为本发明的穿戴装置的结构示意图;
52.图中:
53.1.背部支撑板,1-1.穿戴装置,1-2.电机架;
54.2.机械臂,2-1.固定基座,2-2.大臂旋转关节,2-3.刚性大臂,2-4.刚性小臂,2-5.
连续型柔性臂,2-6.机械爪,2-7.大臂驱动轴,2-8.小臂驱动轴,2-9.大臂驱动轮,2-10.小臂驱动轮,2-11.第一换向定滑轮,2-12.第二换向定滑轮;2-13.导向轮子;
55.3.绳索张紧装置,3-1.导向机构,3-2.张紧机构,3-3.张紧导向轮,3-4.张紧轮,3-5.隔板;
56.4.驱动装置,4-1.无刷直流电机,4-3.电机驱动器,4-4.套索,4-5.绳索,4-6.同步带;
57.5.控制装置,5-2编码器,5-3弯曲传感器,5-4手臂肌电传感器;
58.6.电源装置。
具体实施方式
59.为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明。
60.如图1~15所示,一种面向水果采摘的刚柔耦合绳驱动外肢体机器人,包括背部支撑板1、安装于背部支撑板1的穿戴装置1-1、电源装置6、控制装置5和两个机械臂2;其中,
61.背部支撑板1上部的u型凹槽用于安装穿戴装置1-1,背部支撑板1的上端部两侧分别安装机械臂2的固定基座2-1,背部支撑板1的背面上端两侧分别安装绳索张紧装置3,绳索张紧装置3用于机械臂2初始复位时张紧绳索4-5,两个绳索张紧装置3的下方安装有四个呈竖向阶梯式分布的电机架1-2,背部支撑板1的背面中部及u型凹槽两侧开有凹槽,分别安装有控制装置6的部分部件、电机驱动器4-3和电源装置6。
62.如图1、2、3、15所示,所述的穿戴装置1-1为一体式结构,其背部为u型凸台,用于安装固定于背部支撑板1,穿戴装置1-1前端为肩部固定架和腰带。
63.如图1、2、3、4、5、6、7、8、12、13所示,所述的机械臂2包括机械臂座、刚性大臂2-3、刚性小臂2-4、连续型柔性臂2-5和机械爪2-6,所述机械臂座包括固定基座2-1和大臂旋转关节2-2,刚性大臂2-3和大臂旋转关节2-2由大臂驱动轴2-7连接,刚性小臂2-4和刚性大臂2-3由小臂驱动轴2-8连接,连续型柔性臂2-5安装于刚性小臂2-4的末端凹槽处,背部支撑板1两侧的驱动电机通过同步带4-6驱动大臂旋转关节2-2运动,驱动装置4包括四台无刷直流电机4-1,每台无刷直流电机4-1的输出轴安装有绕线轮,绕线轮上绕有两条绕向相反的绳索4-5,背部支撑板1背面的四台无刷直流电机4-1输出4组即8条绳索4-5,即一组绳索4-5用于驱动刚性大臂2-3,一组绳索4-5用于驱动刚性小臂2-4,两组绳索4-5用于驱动连续型柔性臂2-5。经过绳索张紧装置3及固定基座2-1和大臂旋转关节2-2之间的套索4-4后,驱动刚性大臂的绳索4-5固定于大臂驱动轮2-9,驱动刚性小臂2-4的绳索4-5和连续型柔性臂2-5的绳索再经过大臂驱动轴2-7上的三个第一换向定滑轮2-11,驱动刚性小臂2-4的绳索4-5固定于小臂驱动轴2-8上的小臂驱动轮2-10,驱动连续型柔性臂2-5的绳索再经过小臂驱动轴2-8上的两个第二换向定滑轮2-12和刚性小臂2-4末端的两个导向轮子2-13,最后经过连续型柔性臂2-5四周90度分布的绳孔,固定于连续型柔性臂2-5末端。单个机械臂2具有5个自由度,分别为大臂旋转关节2-2一个自由度、刚性大臂2-3一个自由度、刚性小臂2-4一个自由度和连续型柔性臂2-5两个自由度。大臂旋转关节2-2的轴承和大臂驱动轴2-7对应人体的肩关节,小臂驱动轴2-8对应人体的肘关节,连续型柔性臂2-5对应人体的腕关节。连续型柔性臂2-5的材质为高性能尼龙。
64.所述的连续型柔性臂2-5对应人体的腕关节,由四条绳索4-5驱动,可实现两个自由度的弯曲运动,能够实现保护水果的柔性抓取,其末端安装的机械爪2-6进行抓取动作,且机械爪2-6用于与水果接触的部位为硅胶柔性材质,能够实现对水果的有效保护。
65.具体地,本实施例中的机械臂2采用的是刚性结构和柔性结构相结合,将刚性结构控制精度高、负载能力强等优点和柔性结构柔顺性好、较好地空间可达性等优点进行了有效结合;刚性结构能够准确到达预定采摘位置,柔性结构能够完成对水果地无损采摘,降低了作业人员在采摘水果时的工作强度,提高了采摘时的良品率。
66.如图9、10、11所示,所述的绳索张紧装置3包括导向机构3-1和张紧机构3-2,外侧为张紧机构3-2,内侧为导向机构3-1,绳索4-5经过导向机构3-1进入张紧机构3-2,张紧机构3-2具有八个张紧组件,每个张紧组件位于一层,相邻层之间通过隔板3-5隔开,每层两侧有固定用于导向的张紧导向轮3-3,中间为可伸缩的张紧轮3-4,张紧轮3-4的前后伸缩通过弹性元件和螺栓的共同作用完成,用于绳索4-5的张紧;由于无刷直流电机4-1输出的驱动绳索4-5不在同一平面内,张紧机构3-2相临两层的张紧组件为前后分布;绳索4-5从无刷直流电机4-1经过导向机构3-1进入张紧机构3-2,然后输出到机械臂2中,可以有效降低机械臂2运转过程中因为驱绳索4-5松弛带来的运动误差。
67.每个电机都有一个电机驱动器4-3,单个机械臂2的运动由5个电机控制,背部支撑板1背面的4个无刷直流电机4-1自下而上,第1个无刷直流电机4-1控制刚性大臂2-3俯仰动作,第2、3个无刷直流电机4-1控制连续型柔性臂2-5两个自由度的弯曲动作,第4个无刷直流电机4-1控制刚性小臂2-4的俯仰动作,背部支撑板1两侧的驱动电机控制整体机械臂2的旋转运动。第1个无刷直流电机4-1输出的绳索经过绳索张紧装置3和固定基座2-1,固定于大臂驱动轴2-7上的大臂驱动轮2-9。第4个无刷直流电机4-1输出的绳索经过绳索张紧装置3、固定基座2-1和大臂驱动轴2-7上的第一换向定滑轮2-11,固定于小臂驱动轴2-8上的小臂驱动轮2-10。第2、3个无刷直流电机4-1输出的四条绳索经过绳索张紧装置3、固定基座2-1、大臂驱动轴2-7上的第一换向定滑轮2-11、小臂驱动轴2-8上的第二换向定滑轮2-12和刚性小臂2-4末端的导向轮子2-13,固定于连续型柔性臂2-5末端。两侧的驱动电机通过同步带4-6与大臂旋转关节2-2连接。所述的电机均安装于背部支撑板1,机械臂2采用绳索4-5驱动,相较于传统机械臂2,能够有效减少机械臂2运动时的惯性,且能够有效保护电机等核心部件。
68.如图2、3、4、7、8、14所示,所述的控制装置5包括多个编码器5-2、多个弯曲传感器5-3、主控芯片、手臂肌电传感器5-4和无线控制手柄,在大臂旋转关节2-2、大臂驱动轴2-7和小臂驱动轴2-8处安装有编码器5-2,连续型柔性臂2-5的正面和侧面安装有弯曲传感器5-3。无线控制手柄和手臂肌电传感器5-4控制机械臂2运动,编码器5-2和弯曲传感器5-3将实际运动数据发送至主控芯片5-1,主控芯片5-1进行运动补偿。根据水果采摘的作业需要,可选择通过手臂肌电传感器5-4或者无线手柄5-5来实现对机械臂的运动控制。本发明具有两种控制模式,使其具备更完善的人机交互功能,分别为跟随运动模式和独立运动模式。跟随运动模式:通过手臂肌电传感器5-4识别人体手臂的运动姿态,然后通过控制各个电机使机械臂2运动成人体手臂相同姿态;独立控制模式:通过无线控制手柄5-5实现对机械臂2不同位姿的控制。本发明还通过运动补充来进行闭环控制,提高运动精度。
69.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完
全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1