一种用于机器人的机械爪中抓取防脱组件
1.本发明属于机器人机械爪相关技术领域,特别是涉及一种用于机器人的机械爪中抓取防脱组件。
背景技术:
2.目前机器人多用于特种作业,来防止特种作业环境对工作人员造成伤害,机器人的机械爪是完成其工作的必要组件,能够对危险物施行抓取以及转移,但它在实际使用中仍存在以下弊端:
3.现有机器人的机械爪多采用夹持力对抓取物实施抓取,对于一些形状特殊的物体,由于机械爪与物体的正接触面积较小,使得机械爪与物体之间的摩擦力较小,从而使得机械爪无法对物体施行有效的夹持,进而出现物体腾空时与机械爪脱离的情况,使特种作业无法有序进行。
4.因此,现有的机器人机械爪存在着无法对物体施行有效抓取,容易出现物体腾空时出现物体脱落的情况,无法满足实际使用中的需求,所以市面上迫切需要能改进的技术,以解决上述问题。
技术实现要素:
5.本发明的目的在于提供一种用于机器人的机械爪中抓取防脱组件,通过偏转板于偏转槽内部的探出,能够增加机械爪与被抓取物体的接触面积,并且利用偏转板与被抓取物体之间的贴合,能够增加机械爪与被抓取之间的静摩擦力,能够有效避免出现被抓取物体腾空时与机械爪之间分离的情况,可以保证特种作业的稳定进行。
6.为解决上述技术问题,本发明是通过以下技术方案实现的:
7.本发明为一种用于机器人的机械爪中抓取防脱组件,包括机械爪与物体接触面设置的形变防脱组件,所述防脱组件包括偏转板,所述机械爪内部设置有供压气囊,所述偏转板通过供压气囊内部压力的变化在机械爪侧面偏转,所述机械爪侧面的偏转板设置有多个,多个偏转板与被抓取物体外表的贴合,能够进一步提升机械爪与被抓取物之间的静摩擦力,使被抓取物的抓取以及转移更加地稳定。
8.所述偏转板的一侧一体设置有封闭罩,所述封闭罩与偏转板之间形成的密闭空间与供压气囊贯通,所述封闭罩通过供压气囊内部气压变化进行伸缩,封闭罩的形变能够增加偏转板与被抓取物之间的摩擦力,提升机械爪对被抓取物固定的效果。
9.所述偏转板转动安装在机械爪的侧面,且偏转板远离封闭罩的一侧与机械爪的侧面齐平,所述供压气囊通过气管连接有扰气组件,且供压气囊内部的气压通过扰气组件改变。
10.进一步地,所述偏转板远离封闭罩的一侧与封闭罩远离供压气囊的端部齐平,所述机械爪的侧面开设有用于转动安装偏转板的偏转槽,所述偏转槽一端的内壁通过转轴与偏转板转动连接,且偏转板远离转轴的端面弯曲设置,所述偏转槽与偏转板相匹配,可以实
现对偏转板的隐藏,使偏转板在不进行偏转时,能够不影响机械爪可夹持物体的尺寸。
11.进一步地,所述偏转板的侧面通过封闭罩与机械爪侧面齐平,所述封闭罩远离供压气囊一端的内壁与偏转板的侧面相离,利用膨胀形变的封闭罩能够进一步增加偏转板与物体之间的接触面积。
12.进一步地,所述扰气组件包括气腔、于气腔内部滑动安装的滑塞,所述气腔的一端与气管固定,所述滑塞远离气管的一侧一体设置有支杆,所述支杆外壁转动安装有力杆,所述气管的内部转动安装有涡轮蜗杆,且气腔的内壁固定有为涡轮蜗杆提供动力的电动组件,所述力杆远离支杆的一端延伸至涡轮蜗杆外壁螺旋型槽的内部,使供压气囊内部的气压更加稳定,使机械爪对抓取物的固定更加稳定。
13.进一步地,所述防脱组件包括能够抵在抓取物表面的伸缩杆,所述机械爪的侧面开设有伸缩孔,所述伸缩孔的内壁与伸缩杆的端部之间设置有复合弹簧,所述复合弹簧由伸缩弹簧和挤压弹簧组成,所述伸缩弹簧的弹性系数不大于挤压弹簧的弹性系数,且伸缩弹簧和挤压弹簧的中心轴与伸缩杆的中心轴重合,所述伸缩弹簧和挤压弹簧相靠近的端部贴合,使伸缩杆能够特定方向进行滑动,且不影响伸缩杆的正常复位。
14.进一步地,多个所述伸缩杆在机械爪的侧面阵列分布,所述伸缩杆伸入伸缩孔内部的一端为t字型结构,且伸缩孔的内壁与伸缩杆的端部匹配,防止伸缩杆与伸缩孔之间意外分离。
15.进一步地,所述伸缩杆伸出伸缩孔的端部为二分之一的球形结构,防止伸缩杆在被抓取物表面形成划痕。
16.进一步地,所述伸缩杆伸出伸缩孔的端部活动安装有贴合盘,所述贴合盘的侧面通过滚珠与伸缩杆的端面转动连接,所述贴合盘的圆心与伸缩杆的中心轴重合,所述贴合盘为软性材质,然性材质的贴合盘能够与被抓取物的表面贴合,从而使机械爪对物体的抓取更加地稳定。
17.本发明具有以下有益效果:
18.1、本发明通过设置能够于偏转槽内部探出的偏转板,可以有效增加机械爪与被抓取物体之间的接触面积以及静摩擦力,进而能够有效防止被抓取物体在腾空时出现与机械爪之间分离的情况,通过涡轮蜗杆、力杆以及支杆对滑塞进行传动,可以较为精确地控制滑塞在气腔内部的滑动距离,从而控制气腔内部的气压变化量处于稳定区间,避免出现供压气囊或者封闭罩出现爆裂的情况,并且利用涡轮蜗杆的单向传动,还能够使供压气囊内部的气压保持恒定,在物体被抓取过程中,使偏转板与被抓取物保持贴合。
19.2、本发明通过能够探出伸缩孔的伸缩杆,利用伸缩杆端部向被抓取物外表面坑洼处的伸入,能够有效增加被抓取物与机械爪之间相对滑动的阻力,使机械爪与被抓取物之间的相对固定更加地稳定,避免出现被抓取物腾空时脱离机械爪的情况。
附图说明
20.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
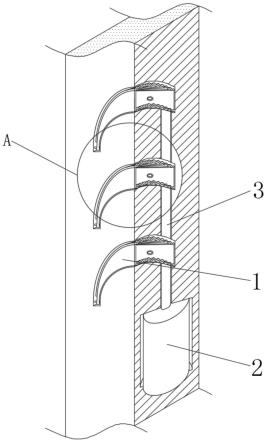
21.图1为本发明实施例一中机械爪局部剖视图;
22.图2为本发明图1中a处结构放大图;
23.图3为本发明实施例一中气腔结构正剖图;
24.图4为本发明实施例一中机械爪结构图;
25.图5为本发明实施例二中机械爪结构图:
26.图6为本发明实施例二中机械爪局部剖视图;
27.图7为本发明实施例二中伸缩杆结构图。
28.附图中,各标号所代表的部件列表如下:
29.1、偏转板;11、封闭罩;12、偏转槽;13、转轴;2、供压气囊;3、气管;31、气腔;32、滑塞;33、支杆;34、力杆;4、伸缩杆;41、伸缩孔;42、复合弹簧;421、伸缩弹簧;422、挤压弹簧;43、贴合盘;44、滚珠。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
31.实施例一
32.请参阅图1-4所示,本发明为一种用于机器人的机械爪中抓取防脱组件,包括机械爪与物体接触面设置的形变防脱组件,防脱组件包括偏转板1,偏转板1在机械爪的侧面发生偏转,能够先于机械爪与物体接触,同时偏转的偏转板1能够对物体进行较小面积的挤压,从而可以显著提升物体与机械爪之间脱离时的阻力,保证机械爪可以对物体施行有效夹持固定。
33.机械爪内部设置有供压气囊2,偏转板1通过供压气囊2内部压力的变化在机械爪侧面偏转,机械爪侧面的偏转板1设置有多个。
34.多个偏转板1的共同作用,能够进一步地提升物体脱离机械爪的阻力,从而使机械爪对物体的夹持固定更加地稳定。
35.偏转板1的一侧一体设置有封闭罩11,封闭罩11与偏转板1之间形成的密闭空间与供压气囊2贯通,封闭罩11通过供压气囊2内部气压变化进行伸缩。
36.封闭罩11与偏转板1之间形成的封闭空间内部气压升高时,封闭罩11能够产生一定的膨胀,并使其膨胀部位与被抓取物体表面接触,从而能够进一步地增加偏转板1与被抓取物体之间的接触面积。
37.膨胀之后并与别抓取物体表面接触的封闭罩11,能够与被抓取物体的表面保持贴合,并且封闭罩11在与被抓取物体贴合之后还能够延着被抓取物体的表面进行一定程度的延伸,进而能够有效进一步地增加被抓取物体脱离机械爪时的阻力,使机械爪对物体的抓取更加地稳定牢靠。
38.为了使偏转板1不会对机械爪对物体的覆盖造成阻碍,偏转板1转动安装在机械爪的侧面,且偏转板1远离封闭罩11的一侧与机械爪的侧面齐平,供压气囊2通过气管3连接有扰气组件,且供压气囊2内部的气压通过扰气组件改变。
39.偏转板1在未偏转时能够没入偏转槽12的内部,从而实现对偏转板1的隐藏,使机械爪的侧面保持光滑。
40.其中,偏转板1远离封闭罩11的一侧与封闭罩11远离供压气囊2的端部齐平,机械爪的侧面开设有用于转动安装偏转板1的偏转槽12,偏转槽12可以对偏转板1进行隐藏。
41.偏转槽12一端的内壁通过转轴13与偏转板1转动连接,偏转槽12与偏转板1相匹配,偏转板1远离转轴13的端面弯曲设置,能够进一步地减小偏转板1与物体之间的接触面积,从而增大偏转板1弯曲端部与物体之间的压强,从而增加物体脱离机械爪的阻力。
42.并且偏转板1弯曲设置的端部能够伸入物体表面的凹陷处,可以使机械爪与被抓取物体贴合的更加紧密,同时进一步增大物体脱离机械爪的阻力。
43.偏转板1通过封闭罩11于偏转槽12内部隐藏,且于偏转槽12内部隐藏的偏转板1的侧面与机械爪侧面齐平,从而使机械爪侧面保持光滑。
44.封闭罩11远离供压气囊2一端的内壁与偏转板1的侧面相离,使得封闭罩11内部气压增加时能够发生膨胀,膨胀的封闭罩11能够与被抓取物体的表面保持贴合,从而能够增加物体脱离机械爪的阻力,使机械爪对物体的抓持更加地稳定。
45.其中,扰气组件包括气腔31、于气腔31内部滑动安装的滑塞32,于气腔31内部滑动的滑塞32,可以改变气腔31内部的气压,从而能够实现气腔31内部空气与供压气囊2内部空气的交换,实现供压气囊2的膨胀和收缩。
46.为了使气腔31内部气压在改变后保持恒定,气腔31的一端与气管3固定,滑塞32远离气管3的一侧一体设置有支杆33,支杆33外壁转动安装有力杆34,气管3的内部转动安装有涡轮蜗杆,利用涡轮蜗杆单向传动的特性,使得滑塞32在气腔31内部的位置不会因为供压气囊2以及气腔31内部的气压发生改变,从而使气腔31内部气压发生变化后能够保持稳定。
47.其中,气腔31的内壁固定有为涡轮蜗杆提供动力的电动组件,力杆34远离支杆33的一端延伸至涡轮蜗杆外壁螺旋型槽的内部,电动组件可以为现有技术中的电动马达,并且电动马达的接线以及控制均为本技术领域人员公知技术。
48.实施例二
49.为了能够对拥有较为复杂外形的物体实施抓持,并且避免物体在腾空时发生与机械爪之间脱离的情况。
50.请参阅图5-7,其中与实施例一不同的是:防脱组件包括能够抵在抓取物表面的伸缩杆4,机械爪的侧面开设有伸缩孔41,伸缩孔41的内壁与伸缩杆4的端部之间设置有复合弹簧42,多个伸缩杆4在机械爪的侧面阵列分布,通过多个伸缩杆4在伸缩孔41内部的伸缩,使得伸缩杆4与物体表面贴合的端部产生凹陷,从而能够有效实现被抓取物与机械爪之间的固定。
51.优选的,复合弹簧42由伸缩弹簧421和挤压弹簧422组成,伸缩弹簧421的弹性系数不大于挤压弹簧422的弹性系数,且伸缩弹簧421和挤压弹簧422的中心轴与伸缩杆4的中心轴重合,伸缩弹簧421和挤压弹簧422相靠近的端部贴合。
52.伸缩弹簧421相对于挤压弹簧422更易产生形变,伸缩弹簧421使得伸缩杆4与被抓取物接触时较容易在伸缩孔41内部滑动,从而满足伸缩杆4在伸缩孔41内部的滑动,挤压弹簧422随着伸缩弹簧421形变量的增加,即挤压弹簧422受到的相互作用力增加,能够连同伸缩弹簧421一起对伸缩杆4的滑动提供阻力,从而保证机械爪与被抓取物体之间的固定。
53.采用伸缩弹簧421和挤压弹簧422能够避免采用单一弹簧出现弹簧弹性系数被改
变的情况,从而保证伸缩杆4在伸缩孔41内部滑动的流畅性,以及保证伸缩杆4端部能够与被抓取物体的表面保持贴合。
54.为了防止伸缩杆4意外脱离伸缩孔41,伸缩杆4伸入伸缩孔41内部的一端为t字型结构,且伸缩孔41的内壁与伸缩杆4的端部匹配。
55.伸缩杆4伸出伸缩孔41的端部为二分之一的球形结构,能够使伸缩杆4更易伸入被抓取物体表面的凹陷处,同时能够防止伸缩杆4端部在被抓取物体表面产生划痕。
56.其中,伸缩杆4伸出伸缩孔41的端部活动安装有贴合盘43,贴合盘43的侧面通过滚珠44与伸缩杆4的端面转动连接,贴合盘43的圆心与伸缩杆4的中心轴重合,贴合盘43为软性材质。
57.贴合盘43能够进一步增加伸缩杆4与被抓取物体之间的摩擦力,并且能够防止伸缩杆4端部与被抓取物体表面硬性接触,造成被抓取物体的破损。
58.以上仅为本发明的优选实施例,并不限制本发明,任何对前述各实施例所记载的技术方案进行修改,对其中部分技术特征进行等同替换,所作的任何修改、等同替换、改进,均属于在本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1