一种机器人的控制装置、及控制系统的制作方法
1.本实用新型涉及机器人控制技术领域,特别涉及一种机器人的控制装置、及控制系统。
背景技术:
2.目前,机器人编程概念火爆,各种编程技术逐步启蒙化、低龄化、普及化,机器人编程普及化市场份额快速提升。
3.目前业内普遍采用pc图形化编程,需要大量使用电脑鼠标、键盘,器材成本高,使用门槛高,在结合机器人硬件的学习和调试时,非常容易产生程序逻辑不匹配、调试难度大、软硬件兼容问题,使用者难以培养良好的机器人编程素养。
4.基于此,如何提高对机器人进行控制的便捷性,且能够降低低龄人群在机器人控制程序编写上的门槛,有利于培养低龄人群良好的机器人编程素养,是亟待解决的技术问题。
技术实现要素:
5.本实用新型的目的在于提供一种机器人的控制装置,及控制系统,可以在一定程度上提高了对机器人进行控制的便捷性。
6.具体的,本实用新型采用如下技术方案:
7.根据本实用新型实施例第一方面,提供了一种机器人的控制装置,所述控制装置包括:编程交互模块,所述编程交互模块包括至少一个指令生成单元,所述指令生成单元用于被触发生成对应的指令代码;程序显示模块,所述程序显示模块用于显示由至少一条指令代码有序组成的指令程序;控制模块,所述控制模块用于生成与所述指令程序相对应的指令信号;信号输出模块,所述信号输出模块用于向内置在所述机器人的第一执行器输出所述指令信号,以控制所述第一执行器执行与所述指令信号相对应的动作。
8.在本实用新型的一些实施例中,基于前述方案,所述控制装置还包括信号输入模块,所述信号输入模块用于接收内置在所述机器人的第一传感器采集的传感信号,以使得所述控制模块根据所述传感信号生成与所述指令程序相对应的指令信号。
9.在本实用新型的一些实施例中,基于前述方案,所述控制装置还包括至少一个指令按键,所述指令按键用于触发所述指令生成单元生成对应的指令代码。
10.在本实用新型的一些实施例中,基于前述方案,所述控制装置还包括显示控制按键,所述显示控制按键用于调整所述程序显示模块显示的指令程序。
11.在本实用新型的一些实施例中,基于前述方案,所述控制装置还包括显示屏,所述程序显示模块通过所述显示屏显示由至少一条指令代码有序组成的指令程序。
12.在本实用新型的一些实施例中,基于前述方案,所述控制装置还包括控制模式选择按键,所述控制模式选择按键用于选择针对所述机器人的控制模式。
13.在本实用新型的一些实施例中,基于前述方案,所述控制模式包括程序控制模式,
实时控制模式,以及蓝牙控制模式。
14.在本实用新型的一些实施例中,基于前述方案,所述控制装置还包括第二传感器和第二执行器,所述第二传感器用于检测所述控制装置与所述机器人之间的连接状态信号,所述第二执行器用于执行所述控制装置的提示动作。
15.根据本实用新型实施例第二方面,还提供了一种控制系统,所述控制系统包括:第一控制装置,所述第一控制装置为上述第一方面各个实施例所述的控制装置;第一传感器,所述第一传感器用于采集传感信号,并将所述传感信号输入至所述第一控制装置;第一执行器,所述第一执行器用于根据所述控制装置输出的指令信号执行对应的动作。
16.在本实用新型的一些实施例中,基于前述方案,所述控制系统还包括第二控制装置,所述第二控制装置用于所述机器人在蓝牙控制模式下,通过所述第一控制装置控制所述第一执行器执行动作。
17.由上述技术方案可知,本实用新型至少具有如下优点和积极效果:
18.在上述技术方案中,通过触发机器人控制装置的编程交互模块可以自定义生成指令程序,从而可以通过所述指令程序控制内置在所述机器人的第一执行器的动作,进而提高了对机器人进行控制的便捷性,该方案成本低,且能够降低低龄人群在机器人控制程序编写上的门槛,有利于培养低龄人群良好的机器人编程素养。另外,本方案不需要电脑鼠标、键盘,可以直接使用机器人硬件本体(即控制装置)的按键进行编程设计,结合机器人硬件本体的屏幕显示程序反馈,可直接对硬件接口进行调试,可快速完成编程实验学习的目的
19.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本实用新型。
附图说明
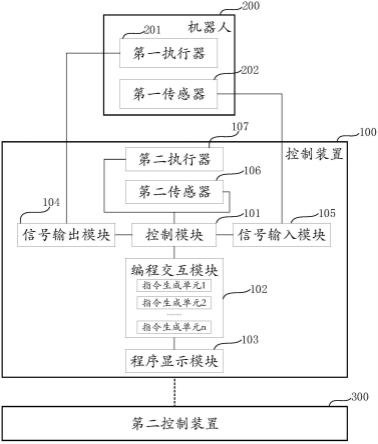
20.图1为本实用新型一个实施例的机器人控制装置及控制系统的模块简图。
21.图2为本实用新型一个实施例的机器人控制装置在不同视角上的形状示意图。
具体实施方式
22.体现本实用新型特征与优点的典型实施方式将在以下的说明中详细叙述。应理解的是本实用新型能够在不同的实施方式上具有各种的变化,其皆不脱离本实用新型的范围,且其中的说明及图示在本质上是当作说明之用,而非用以限制本实用新型。
23.在本实用新型的描述中,需要说明的是,术语“竖直”、“上”、“下”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
25.在本实用新型中,所提出机器人的控制装置和控制系统可以应用于针对ai教育机器人的控制场景中,比如,应用于针对教育编程机器人的控制场景,教育编程机器人的使用群体主要为低龄人群,比如儿童,青少年等等,本实用新型提出的机器人的控制装置和控制系统能够降低低龄人群在机器人控制程序编写上的门槛,有利于培养低龄人群良好的机器人编程素养。
26.本实用新型所提出的机器人的控制装可以连接于机器人上,以用于控制机器人执行相应的动作。
27.如图1,示出了本实用新型一个实施例的机器人控制装置及控制系统的模块简图。
28.请参阅图1,所示的控制装置100包括编程交互模块102,程序显示模块103,控制模块101,信号输出模块104。其中,所述编程交互模块102包括至少一个指令生成单元,所述指令生成单元用于被触发生成对应的指令代码,所述程序显示模块103用于显示由至少一条指令代码有序组成的指令程序,所述控制模块101用于生成与所述指令程序相对应的指令信号,所述信号输出模块104用于向内置在所述机器人200的第一执行器201输出所述指令信号,以控制所述第一执行器201执行与所述指令信号相对应的动作。
29.在本实用新型中,每一个指令生成单元都可以对应一个指令代码,其中每一个指令代码可以对应控制机器人200的某一个动作(比如控制内置在机器人200内部的某一个电机(即第一执行器201)的驱动动作,比如电机正传或者反转的驱动动作),比如,控制机器人200按照赛道轨迹前进,还比如,控制机器人200在遇到障碍物时调整运动方向等等。
30.在本实用新型中,每一个指令生成单元对应的指令代码可以是预先编写好的,当指令生成单元被触发时,即生成与该指令生成单元对应的指令代码。
31.在本实用新型中,用户可以按照一定的顺序触发所述编程交互模块102的各个指令生成单元,从而可以生成由至少一条指令代码有序组成的指令程序,进一步的,所生成的指令程序可以通过程序显示模块103显示给用户,以使得用户可以实时了解已编好的程序。
32.在本实用新型中,所述控制模块101可以根据所述指令程序生成对应的指令信号,并由所述信号输出模块104将所述指令信号输出至内置在所述机器人200的第一执行器201,以控制所述第一执行器201执行相应的动作。
33.请继续参阅图1,在本实用新型的一个实施例中,所述控制装置100还可以包括信号输入模块105,所述信号输入模块105用于接收内置在所述机器人200的第一传感器202采集的传感信号,以使得所述控制模块101根据所述传感信号生成与所述指令程序相对应的指令信号。
34.在本实用新型中,在所述控制模块101根据所述指令程序生成对应指令信号的过程中,所述控制装置100的信号输入模块105还不断接收内置在所述机器人200的第一传感器202采集的传感信号,以使得所述控制模块101根据所述传感信号生成与所述指令程序相对应的指令信号,比如,指令程序中某一端代码的指令为:当机器人200遇到障碍物时调整运动方向,那么,当机器人200遇到障碍物时,通过信号输入模块105将障碍物信号传递给控制模块101,控制模块101根据该障碍物信号生成调整机器人200运动方向的指令信号。
35.在本实用新型的一个实施例中,所述控制装置100还可以包括至少一个指令按键,所述指令按键用于触发所述指令生成单元生成对应的指令代码。
36.在本实用新型中,所述指令按键与所述指令生成单元是一一对应的,当用户按下
某一个指令按键时,则触发与该指令按键对应的指令生成单元生成对应的指令代码,可以理解的是,当用户按照一定的顺序按下所述指令按键时,则会按照对应的顺序生成指令代码,从而得到由至少一条指令代码有序组成的指令程序。
37.需要说明的是,在本实用新型的其它实施例中,用于触发指令单元生产指令代码的也可以是触控屏中的虚拟按钮。
38.在本实用新型中,通过上述键屏交互的编程方式来控制机器人,其好处在于,能够降低低龄人群在机器人控制程序编写上的门槛,有利于培养低龄人群良好的机器人编程素养。
39.在本实用新型的一个实施例中,所述控制装置100还可以包括显示屏,所述程序显示模块103通过所述显示屏显示由至少一条指令代码有序组成的指令程序。
40.在本实用新型的一个实施例中,所述控制装置100还可以包括显示控制按键,所述显示控制按键用于调整所述程序显示模块103显示的指令程序。
41.在本实用新型中,通过显示控制按键调整所述程序显示模块显示的指令程序(比如切换显示下一页程序,或者定位某一程序代码),可以缩小显示屏的大小,一来可以缩小所述控制装置的尺寸,便于携带和取放,二来可以节约所述控制装置100的生产成本。
42.在本实用新型的一个实施例中,所述控制装置100还可以包括控制模式选择按键,所述控制模式选择按键用于选择针对所述机器人200的控制模式。
43.在本实用新型的一个实施例中,所述控制模式可以包括程序控制模式,实时控制模式,以及蓝牙控制模式。
44.在本实用新型中,所述程序控制模式是指通过所述程序交互模块预先编程,得到指令程序,然后由所述指令程序控制机器人200执行相应的动作。所述实时控制模式是指通过所述控制装置100直接实时的控制机器人200执行相应的动作,即当用户在所述控制装置100上进行一个操作时,机器人200实时执行一个对应的动作,无需预先编程。所述蓝牙控制模式是指,在机器人200处于蓝牙控制模式下,由一个第二控制装置300通过所述控制装置100间接的控制所述机器人200执行动作。
45.请继续参阅图1,
46.在本实用新型的一个实施例中,所述控制装置100还可以包括第二传感器106和第二执行器107,所述第二传感器106用于检测所述控制装置100与所述机器人200之间的连接状态信号,所述第二执行器107用于执行所述控制装置100的提示动作。
47.在本实用新型中,第二传感器106检测所述控制装置100与所述机器人200之间的连接状态信号,比如,第二传感器106检测所述信号输出模块104和机器人200第一执行器201的之间的连接状态,还比如,第二传感器106检测所述信号输入模块105和机器人200第一传感器202的之间的连接状态。
48.在本实用新型中,第二执行器107执行所述控制装置100的提示动作,比如,当所述信号输出模块104和机器人200第一执行器201的之间的连接状态为已连接时,第二执行器107提示用户所述信号输出模块104和机器人200第一执行器201已连接,还比如,当所述信号输入模块105和机器人200第一传感器202的之间的连接状态为已连接时,第二执行器107提示用户所述信号输入模块105和机器人200第一传感器202已连接。
49.在本实用新型中,还提出了一种机器人200的控制系统。
50.请继续参阅图1,所示机器人200的控制系统包括第一控制装置,第一传感器202,第一执行器201。其中,所述第一控制装置为如图1所示的控制装置100,所述第一传感器202用于采集传感信号,并将所述传感信号输入至所述第一控制装置,所述第一执行器201用于根据所述控制装置100输出的指令信号执行对应的动作。
51.请继续参阅图1,在本实用新型的一个实施例中,所示机器人200的控制系统还可以包括第二控制装置300,所述第二控制装置300用于所述机器人200在蓝牙控制模式下,通过所述第一控制装置控制所述第一执行器201执行动作。
52.在本实用新型中,所述第一控制装置可以与机器人200的第一传感器202和第一执行器201物理直接连接,所述第二控制装置300可以和所述第一控制装置蓝牙连接。
53.具体的,在机器人200处于蓝牙控制模式下,第二控制装置300的控制优先级可以大于所述第一控制装置的控制优先级,用户可以手持所述第二控制装置300通过所述第一控制装置控制所述第一执行器201执行动作,其好处在于,当第一控制装置的控制出现故障时,还可以通过所述第二控制装置300在蓝牙连接第一控制装置的情况下远程控制所述机器人200执行动作,从而提高机器人200控制的稳定性。
54.为了使得本领域技术人员更好的理解所述机器人的控制装置,下面结合图2进行详细说明:
55.参见图2,为本实用新型一个实施例的机器人控制装置在不同视角上的形状示意图。
56.如图2所示,视角410和视角450分别为所述控制装置在前后两个方向上的视角,视角440和视角430分别为所述控制装置在左右两个方向上的视角,视角420和视角460分别为所述控制装置在上下两个方向上的视角。
57.进一步的,端口421和端口422分别为所述控制装置在信号输入模块105和信号输出模块104上的信号端口,按键411为所述控制装置的指令按键,按键412为所述控制装置的控制模式选择按键,按键413为所述控制装置的显示控制按键,屏幕414为显示由至少一条指令代码有序组成的指令程序的显示屏。
58.由上述技术方案可知,本实用新型至少具有如下优点和积极效果:
59.在本实用新型中,通过触发机器人控制装置的编程交互模块可以自定义生成指令程序,从而可以通过所述指令程序控制内置在所述机器人的第一执行器的动作,进而提高了对机器人进行控制的便捷性,该方案成本低,且能够降低低龄人群在机器人控制程序编写上的门槛,有利于培养低龄人群良好的机器人编程素养。另外,本方案不需要电脑鼠标、键盘,可以直接使用机器人硬件本体(即控制装置)的按键进行编程设计,结合机器人硬件本体的屏幕显示程序反馈,可直接对硬件接口进行调试,可快速完成编程实验学习的目的。
60.虽然已参照几个典型实施方式描述了本实用新型,但应当理解,所用的术语是说明和示例性、而非限制性的术语。由于本实用新型能够以多种形式具体实施而不脱离申请的精神或实质,所以应当理解,上述实施方式不限于任何前述的细节,而应在随附权利要求所限定的精神和范围内广泛地解释,因此落入权利要求或其等效范围内的全部变化和改型都应为随附权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1