一种防卡顿的桁架机械手的制作方法
1.本实用新型涉及桁架机械手领域,具体为一种防卡顿的桁架机械手。
背景技术:
2.桁架机械手是一种建立在直角x,y,z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。其控制核心通过工业控制器(如:plc,运动控制,单片机等)实现。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成x,y,z 三轴之间的联合运动,以此实现一整套的全自动作业流程。
3.现有的桁架机械手存在安装流程过于复杂的问题,工作人员对桁架机械手进行安装工作时,需要借助外部工具,对自身的固定件进行紧固,较为繁琐,针对上述问题,在现有的装置基础上进行技术创新。
技术实现要素:
4.本实用新型的目的在于提供一种防卡顿的桁架机械手,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种防卡顿的桁架机械手,包括支撑柱和支撑板,所述支撑柱上方安装有支撑板,且支撑板中部内侧安装有连接板,所述连接板两侧均设置有用于便捷安装固定的所述固定组件,所述固定组件包括拉动块、连接杆、定位块、复位弹簧和固定块,所述拉动块靠近连接板一侧外壁固定连接有连接杆,且连接杆远离拉动块一端固定连接有定位块,所述连接杆外壁套设有复位弹簧,所述复位弹簧远离定位块一端设置有固定块,所述固定块与连接板固定连接。
6.进一步的,所述固定组件还包括定位槽,所述连接板与定位块对应位置开设有定位槽,且定位槽内壁尺寸与固定块外壁尺寸相贴合。
7.进一步的,所述连接板下方安装有吸附模组,且支撑板与连接板垂直分布。
8.进一步的,所述支撑柱外壁安装有plc控制盒,且plc控制盒内部顶端安装有散热风扇。
9.进一步的,所述支撑柱顶端固定连接有安装卡块,且支撑柱底端固定连接有底板。
10.进一步的,所述连接板与支撑柱连接处设置有安装套,且安装套底部外壁开设有插槽。
11.进一步的,所述插槽内部设置有限位槽,且插槽与限位槽相连通。
12.与现有技术相比,本实用新型的有益效果是:该防卡顿的桁架机械手,在安装时较为方便,且无需借用外部工具即可完成对设备整体支架的固定组装,避免复杂的工作流程浪费工作人员的时间,增加设备的便捷性与实用性,设备由plc控制盒控制设备中的伺服电机和气泵进行工作,plc控制盒内部的散热风扇可对设备内部进行有效的散热,从而避免内部主板过热,导致设备运作时发生卡顿;
13.1.本实用新型在安装时较为方便,且无需借用外部工具即可完成对设备整体支架的固定组装,避免复杂的工作流程浪费工作人员的时间,增加设备的便捷性与实用性;
14.2.本实用新型由plc控制盒控制设备中的伺服电机和气泵进行工作,plc 控制盒内部的散热风扇可对设备内部进行有效的散热,从而避免内部主板过热,导致设备运作时发生卡顿;
15.3.本实用新型中支撑柱与支撑板可进行便捷的拆装处理,拆装时只需转动支撑板即可,使设备在进行转运时,可减少占用的空间,使设备更加符合市场需求。
附图说明
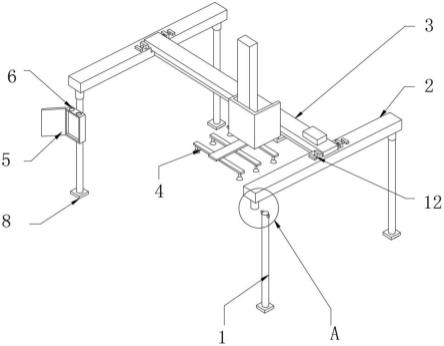
16.图1为本实用一种防卡顿的桁架机械手立体结构示意图;
17.图2为本实用一种防卡顿的桁架机械手固定组件俯视结构示意图;
18.图3为本实用一种防卡顿的桁架机械手图1中a处放大结构示意图;
19.图4为本实用一种防卡顿的桁架机械手安装套立体结构示意图。
20.图中:1、支撑柱;2、支撑板;3、连接板;4、吸附模组;5、plc控制盒;6、散热风扇;7、安装卡块;8、底板;9、安装套;10、插槽;11、限位槽;12、固定组件;1201、拉动块;1202、连接杆;1203、定位块;1204、复位弹簧;1205、固定块;1206、定位槽。
具体实施方式
21.如图1-4所示,一种防卡顿的桁架机械手,支撑柱1上方安装有支撑板2,且支撑板2中部内侧安装有连接板3,连接板3两侧均设置有用于便捷安装固定的固定组件12,连接板3下方安装有吸附模组4,且支撑板2与连接板3 垂直分布,支撑柱1外壁安装有plc控制盒5,且plc控制盒5内部顶端安装有散热风扇6,支撑柱1顶端固定连接有安装卡块7,且支撑柱1底端固定连接有底板8,连接板3与支撑柱1连接处设置有安装套9,且安装套9底部外壁开设有插槽10,插槽10内部设置有限位槽11,且插槽10与限位槽11 相连通,将支撑板2抬升,然后将支撑柱1放置于低端,使安装卡块7进入安装套9的插槽10,随后转动支撑柱1,使安装卡块7与限位槽11相卡合,完成对支撑柱1的安装,支撑柱1底端的底板8为橡胶防滑垫,可以增加摩擦力,由plc控制盒5控制设备中的伺服电机和气泵进行工作,气泵控制吸附模组4对物件进行吸附,plc控制盒5内部的散热风扇6可对设备内部进行有效的散热,从而避免内部主板过热,导致设备运作时发生卡顿,支撑柱1 与支撑板2可进行便捷的拆装处理,拆装时只需转动支撑板2即可,使设备在进行转运时,可减少占用的空间,使设备更加符合市场需求;
22.如图2所示,固定组件12包括拉动块1201、连接杆1202、定位块1203、复位弹簧1204和固定块1205,拉动块1201靠近连接板3一侧外壁固定连接有连接杆1202,且连接杆1202远离拉动块1201一端固定连接有定位块1203,连接杆1202外壁套设有复位弹簧1204,复位弹簧1204远离定位块1203一端设置有固定块1205,固定块1205与连接板3固定连接,固定组件12还包括定位槽1206,连接板3与定位块1203对应位置开设有定位槽1206,且定位槽1206内壁尺寸与固定块1205外壁尺寸相贴合,将连接板3放置于支撑板2 上方,随后向外部移动拉动块1201,拉动块1201通过连接杆1202带动定位块1203同时进行移动,连接板3放置指定位置后,松动拉动块1201,复位弹簧1204通过固定块1205的支撑,使定位块1203向定位槽1206进行移动卡合,便完成对连接板3的固定,在安装时较为方便,且无需借用外部工具即可完
成对设备整体支架的固定组装,避免复杂的工作流程浪费工作人员的时间,增加设备的便捷性与实用性。
23.工作原理:当该防卡顿的桁架机械手在安装时,先将连接板3放置于支撑板2上方,随后向外部移动拉动块1201,拉动块1201通过连接杆1202带动定位块1203同时进行移动,连接板3放置指定位置后,松动拉动块1201,复位弹簧1204通过固定块1205的支撑,使定位块1203向定位槽1206进行移动卡合,便完成对连接板3的固定,随后将支撑板2抬升,然后将支撑柱1 放置于低端,使安装卡块7进入安装套9的插槽10,随后转动支撑柱1,使安装卡块7与限位槽11相卡合,完成对支撑柱1的安装,支撑柱1底端的底板8为橡胶防滑垫,可以增加摩擦力,由plc控制盒5控制设备中的伺服电机和气泵进行工作,气泵控制吸附模组4对物件进行吸附,plc控制盒5内部的散热风扇6可对设备内部进行有效的散热,从而避免内部主板过热,导致设备运作时发生卡顿,这就是该防卡顿的桁架机械手工作原理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1