一种生产线装配工业机器人的制作方法
[0001]
本发明专利涉及一种生产线装配工业机器人。
背景技术:
[0002]
工业机器人技术已经成为当今工业自动化生产的主要支柱之一,国内机器人技术及机器人应用已有了长足的进步,国家也已经将将机器人和智能制造纳入了国家科技创新的优先重点领域。
[0003]
发明专利内容
[0004]
本发明专利的目的在于:针对现有技术的缺陷,提出了一种生产线装配工业机器人,该工作站结构简单、设计合理,能够满足工业机器人工作站的实训需求。
[0005]
本发明专利所采用的技术方案是:一种生产线装配工业机器人,包括安装基座、工业机器人、机器人多功能夹取装置及执行装置、装配装置、送料装置和工作台,所述的装配装置和送料装置通过螺钉固定在工作台上,所述的机器人多功能夹取装置及执行装置通过螺钉安装在工业机器人末端的第六轴输出端,所述的工业机器人通过螺钉固定在安装基座上,安装基座的底面通过螺钉与地面固定在一起。
[0006]
在本发明专利中:所述的送料装置包括料仓机构、隔料挡料机构、物流输送机构和检测机构,上述机构通过安装立柱固定在底部的安装底板上;所述的料仓机构包括坯料零件料仓和料仓固定座,两者组成后固定在料仓底板上,再通过垫高固定块固定在物流输送机构右侧的主动棍轴承安装板上;所述的检测机构包括料仓无料检测开关和抓料位有料检测开关,所述的料仓固定座的左侧安装有料仓无料检测开关,料仓固定座的右侧安装有用于控制坯料零件有序出料的隔料挡料机构,其中所述的隔料机构包括隔料气缸和隔料推块,所述的挡料机构包括挡料气缸和挡料托块,两个机构呈上下位置固定在气缸安装板上;所述的物流输送机构包括物流线主体、输送带、主动辊、主动辊轴承安装板、从动辊、从动辊轴承安装板及驱动电机组成,主动辊轴承安装板和从动辊轴承安装板分别成组安装在物流线主体两侧,主动辊通过轴承连接在各自的轴承安装板内侧,物流线输送带绕在物流线主体及主动辊的外侧,再通过从动辊侧的涨紧在主动辊上。
[0007]
在本发明专利中:所述气缸安装板的下端与料仓底板连接在一起,上端通过连接固定板与料仓固定座连接在一起。
[0008]
在本发明专利中:所述的从动辊轴承安装板上方安装有定位挡料板,用于保证坯料零件在抓料位的位置一致性,从动辊轴承安装板的前侧安装有抓料位有料检测开关,用于反馈给工业机器人可以取料的信号。
[0009]
在本发明专利中:所述装配装置包括装配零件夹持机构、装配送料装置、压料装配机构和零件仓库,上述机构均固定在安装底板上,所述的装配零件夹持机构固定在装配送料装置上,压料装配装置通过装配台支架横跨在装配送料装置上方,其下部与安装底板固定,上部与压料装配气缸安装板固定,其右侧面固定有电磁阀组安装板用于安装固定电磁阀组,所述的零件仓库固定在压料装配装置的前部上方的压料装配气缸安装板上,其上层
为装配母料及装配成品库,下层为装配子料库。
[0010]
在本发明专利中:所述装配零件夹持机构包括气动平行手指和夹爪,所述的装配送料装置包括托板、直线导轨、导轨安装板和送料气缸,气动平行手指和夹爪组成后固定在托板上,通过其下的直线导轨连接在其下的导轨安装板上,拖板的后部连接有送料气缸;所述的导轨安装板固定在安装底板上。
[0011]
在本发明专利中:所述压料装配气缸安装板上设有压料装配气缸。
[0012]
在本发明专利中:所述机器人多功能夹取装置及执行装置包括两件左右对称组成的夹爪机构,夹爪机构的中部上方设有夹爪联接凸台,夹爪机构的中部下方设有用于夹持各种功能工具的工具夹爪,夹爪机构的中部向前侧延伸出一对长悬臂结构,在长悬臂结构的末端设有用于夹持大规格母料的v型大号夹爪,夹爪机构的中部向后侧延伸出一对短悬臂结构,在短悬臂结构的末端设有用于夹持小规格子料的v型小号夹爪。
[0013]
在本发明专利中:所述的夹爪联接凸台上设有螺孔,所述夹爪联接凸台上固定有气动平行手指,通过螺钉和螺孔的配合使得气动平行手指下部的输出端手指固定在夹爪联接凸台上。
[0014]
在本发明专利中:所述的气动平行手指的上部设有末端联接法兰,通过螺钉将末端联接法兰与工业机器人末端的第六轴固定在一起。
[0015]
采用上述技术方案后,本发明专利的有益效果为:本发明专利结构简单、设计合理,通过装配工装站能够很好的进行相关的实训考核,便于教学实训,使得实训的效率大大的提高。
附图说明
[0016]
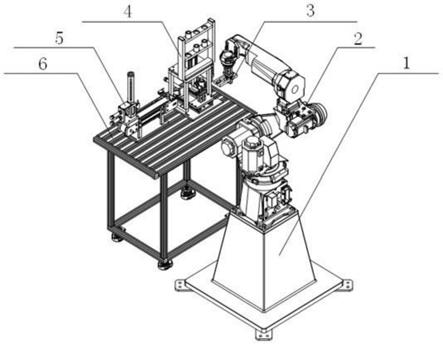
图1为本发明专利的结构示意图;
[0017]
图2为本发明专利的送料装置示意图;
[0018]
图3为本发明专利的装配装置示意图;
[0019]
图4为本发明专利的机器人多功能夹取装置及执行装置示意图;
[0020]
图5为本发明专利的机器人多功能夹取装置及执行装置另一示意图。
[0021]
图中:1.安装基座;2.工业机器人;3.机器人多功能夹取装置及末端执行机构;4.装配装置;5.送料装置;6.工作台;7.抓料位有料检测开关;8.定位挡料板;9.坯料零件;10.料仓无料检测开关;11.料仓固定座;12.坯料零件料仓;13.坯料零件组;14.连接固定板;15.隔料推块;16.挡料托块;17.气缸安装板;18.隔料气缸;19.料仓底板;20.挡料气缸;21.垫高固定块;22.主动辊轴承安装板;23.安装底板;24.物流线主体;25.安装立柱;26.输送带;27.从动辊轴承安装板;28.检测开关安装支架;29.安装底板;30.导轨安装板;31.直线导轨;32.拖板;33.气动平行手指;34.夹爪;35.装配台支架;36.零件仓库;37.电磁阀组;38.送料气缸;39.电磁阀组安装板;40.压料装配气缸安装板;41.压料装配气缸;42.装配子料;43.装配母料;44.夹爪联接凸台;45.工具夹爪;46.v型大号夹爪;47.v型小号夹爪;48.气动平行手指;49.末端联接法兰;50.螺孔。
具体实施方式
[0022]
下面将结合附图对本发明专利作进一步的说明。
[0023]
由图1可见,一种生产线装配工业机器人,包括安装基座1、工业机器人2、机器人多功能夹取装置及执行装置3、装配装置4、送料装置5和工作台6,所述的装配装置4和送料装置5通过螺钉固定在工作台6上,所述的机器人多功能夹取装置及执行装置3通过螺钉安装在工业机器人2末端的第六轴输出端,所述的工业机器人2通过螺钉固定在安装基座1上,安装基座1的底面通过螺钉与地面固定在一起。
[0024]
当接受到装配实训的指令后,一种生产线装配工业机器人的装配装置4工作将装配母料送至装配装置4下部的夹持机构上的夹爪上后夹紧装配母料;一种生产线装配工业机器人的送料装置5工作完成对装配子料的送料动作将装配子料送至取料位等待;工业机器人2工作带动其末端的多功能夹爪及执行机构3完成对装配子料的取料和上料动作;一种生产线装配工业机器人的装配装置4工作完成对装配子料的装配动作后将装配好的装配成品零件移至其上下料工位等待取走;工业机器人2工作带动其末端的多功能夹爪及执行机构3完成对装配成品零件的入库动作;至此完成整个装配工作站的装配实训工作流程等待下一个装配实训指令。
[0025]
由图2可见,所述的送料装置包括料仓机构、隔料挡料机构、物流输送机构和检测机构,上述机构通过安装立柱25固定在底部的安装底板23上;所述的料仓机构包括坯料零件料仓12和料仓固定座11,两者组成后固定在料仓底板19上,再通过垫高固定块21固定在物流输送机构右侧的主动棍轴承安装板22上;所述的检测机构包括料仓无料检测开关10和抓料位有料检测开关7,所述的料仓固定座11的左侧安装有料仓无料检测开关10,料仓固定座11的右侧安装有用于控制坯料零件有序出料的隔料挡料机构,其中所述的隔料机构包括隔料气缸18和隔料推块15,所述的挡料机构包括挡料气缸20和挡料托块16,两个机构呈上下位置固定在气缸安装板17上;所述的物流输送机构包括物流线主体24、输送带26、主动辊、主动辊轴承安装板22、从动辊、从动辊轴承安装板27及驱动电机组成,主动辊轴承安装板22和从动辊轴承安装板27分别成组安装在物流线主体24两侧,主动辊通过轴承连接在各自的轴承安装板内侧,输送带26绕在物流线主体24及主动辊的外侧,再通过从动辊侧的涨紧在主动辊上。所述气缸安装板17的下端与料仓底板19连接在一起,上端通过连接固定板14与料仓固定座11连接在一起;所述的从动辊轴承安装板27上方安装有定位挡料板8,用于保证坯料零件9在抓料位的位置一致性,从动辊轴承安装板27的前侧安装有抓料位有料检测开关7,用于反馈给工业机器人可以取料的信号。
[0026]
具体操作时,工业机器人将要求取料的信号发送给该工作站的送料装置,隔料气缸18工作使活塞杆伸出推动隔料推块15将料仓固定座11内侧的坯料零件9推紧在料仓固定座11内壁上,使该坯料零件9及其上方的所有坯料零件固定无法下落;挡料气缸20工作使活塞杆缩回带动挡料托块16缩回,使挡料托块16上方仅有的一件坯料零件9下落到料仓机构下方的物流输送机构的输送带26上;物流输送机构的驱动电机工作带动输送带26及其上的坯料零件9向左侧的定位挡料板8处移动,坯料零件9通过定位挡料板8作用准确的定位在抓料位处;从动辊轴承安装板27的前侧的抓料位有料检测开关7检测到坯料零件9到位后发送取料信号给工业机器人,工业机器人工作将抓料位的坯料零件9取走做后续工作,至此完成整个送料工作流程等待工业机器人的下一个取料信号。
[0027]
由图3可见,所述装配装置包括装配零件夹持机构、装配送料装置、压料装配装置和零件仓库36,上述机构均固定在安装底板29上,所述的装配零件夹持机构固定在装配送
料装置上,压料装配装置通过装配台支架35横跨在装配送料装置上方,其下部与安装底板29固定,上部与压料装配气缸安装板40固定,其右侧面固定有电磁阀组安装板39用于安装固定电磁阀组37,所述的零件仓库36固定在压料装配装置的前部上方的压料装配气缸安装板40上,所述压料装配气缸安装板40上设有压料装配气缸41,其上层为装配母料及装配成品库,下层为装配子料库。所述装配零件夹持机构包括气动平行手指33和夹爪34,所述的装配送料装置包括托板32、直线导轨31、导轨安装板30和送料气缸38,气动平行手指33和夹爪34组成后固定在托板32上,通过其下的直线导轨31连接在其下的导轨安装板30上,拖板32的后部连接有送料气缸38;所述的导轨安装板30固定在安装底板29上。
[0028]
具体实施时,机器人将零件仓库36上层的装配母料43抓取后移送至下部的上下料工位的装配零件夹持机构上的夹爪34上,夹爪34通过气动平行手指33动作夹紧装配母料43,机器人再将零件仓库36下层的装配子料42抓取后移送至被夹紧的装配母料43上部预装进装配母料43中,由于装配子料42上有专用弹性体,使其能保持在装配前状态不变,送料气缸38工作拉动拖板32后移,将其上的零件夹持机构及被夹紧的预装装配零件移送至装配工位,压料装配气缸13工作将装配子料14压入装配母料15内部完成装配工作,压料装配气缸41缩回后送料气缸38工作推动拖板32前移,将其上的零件夹持机构及被夹紧的装配好的装配零件移送至上下料工位,夹爪34通过气动平行手指33动作松开已经装配好的装配零件,机器人移至上下料工位将已经装配好的装配零件抓取后放入零件仓库36上层的装配成品库内,至此完成整个装配工作流程。
[0029]
由图4-5可见,所述机器人多功能夹取装置及执行装置包括两件左右对称组成的夹爪机构,夹爪机构的中部上方设有夹爪联接凸台44,夹爪机构的中部下方设有用于夹持各种功能工具的工具夹爪45,夹爪机构的中部向前侧延伸出一对长悬臂结构,在长悬臂结构的末端设有用于夹持大规格母料的v型大号夹爪46,夹爪机构的中部向后侧延伸出一对短悬臂结构,在短悬臂结构的末端设有用于夹持小规格子料的v型小号夹爪47;所述的夹爪联接凸台44上设有螺孔50,所述夹爪联接凸台44上固定有气动平行手指48,通过螺钉和螺孔50的配合使得气动平行手指48下部的输出端手指固定在夹爪联接凸台44上;所述的气动平行手指48的上部设有末端联接法兰49,通过螺钉将末端联接法兰与工业机器人末端的第六轴固定在一起。在实际应用时,通过相关指令后控制工业机器人移动定位到特定的某个功能工位后定位停止,发出后续指令控制工业机器人末端执行器的气动平行手48指做相应的闭合或打开动作,以控制多功能夹爪前后两侧的v型夹爪即v型大号夹爪46和v型小号夹爪47对相关坯料零件做相应的抓取或放下动作,以及控制多功能夹爪中部下方的工具夹爪45对各功能工具组做相应的抓取使用或放下归位动作,通过气动平行手指48的动作可以使多功能夹爪做一定范围内的开合动作以达到夹持各功能工具和坯料零件。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1