一种房颤消融术前模拟训练设备及训练方法
1.本发明属于心血管手术模拟技术领域,具体涉及一种房颤消融术前模拟训练设备及训练方法。
背景技术:
2.房颤是指心房电活动紊乱、心肌快速而不协调的微弱蠕动,导致心房失去正常有效收缩的现象。由于房颤发病率随着年龄的增加而升高,随着我国人口老龄化的进程,房颤患者总数还将进一步增加。同正常人群相比,房颤具有很高的致死率和致残率,严重威胁人类身体健康乃至生活质量。
3.治疗房颤的手段主要有药物治疗和手术治疗两种。药物治疗存在患者需长期服药、副作用大、依从性差等问题。手术治疗的方法有电复律和消融:电复律只能暂时终止房颤而不能减少房颤复发;消融是通过将一定形式的能量作用于心肌,使其丧失电生理功能、阻断电信号作用以融断折返环路或消除异常病灶,从而减少房颤复发甚至根治。目前用的最多的是介入式导管微创消融。
4.手术导管通过股静脉穿刺口抵达心脏病灶处实施消融术。由于心血管内的导管不可见、对导管的行进路径规划不足、术前缺乏训练,从而引起手术耗时长、术后易复发、易产生并发症等问题。
技术实现要素:
5.本技术的目的在于提供一种房颤消融术前模拟训练设备,训练术者利用该设备进行消融术训练,以改善当前心脏消融术中存在上述问题。
6.为了达到上述目的,本发明采用的技术方案是:
7.一种房颤消融术前模拟训练设备,包括心脏模型支撑平台、静脉血管支撑平台、手术训练操作平台以及消融手术训练导管,所述静脉血管支撑平台位于便于医生训练的方位,静脉血管架设在静脉血管支撑平台上,所述手术训练操作平台位于静脉血管支撑平台的后方,所述心脏模型支撑平台位于静脉血管支撑平台的前方,所述手术训练操作平台、静脉血管支撑平台以及心脏模型支撑平台位于同一水平轴线上,在静脉血管模型支撑平台上方设置有双目立体视觉系统,所述消融手术训练导管贯穿静脉血管进行消融训练。
8.优选的,所述心脏模型支撑平台包括心脏支撑板、心脏支撑杆和心脏模型,所述心脏支撑杆设置于心脏支撑板的上端面,所述心脏模型安装在心脏支撑杆的上端,所述心脏支撑板的下方设置有支撑台加固板,所述支撑台加固板的上端面与心脏支撑板下端面之间通过多根第一圆管连接,所述支撑台加固板的下端面的四角处各设置有一调平调高地脚。
9.优选的,所述静脉血管支撑平台包括同水平轴线设置的第一基座板、第二基座板和第三基座板,所述第一基座板、第二基座板和第三基座板的底部两端均设置有底座,所述第一基座板的侧壁四角各设置有一根紧固丝杆,所述紧固丝杆的另一端依次贯穿第二基座板和第三基座板,所述第一基座板与第二基座板之间设置有第一限位杆、第二限位杆、第三
限位杆和第四限位杆,所述第一限位杆和第二限位杆之间设置有第一水平杆和第二水平杆,所述第一水平杆和第二水平杆的两端各通过一个滑动接头与第一限位杆和第二限位杆滑动连接,所述第三限位杆和第四限位杆之间设置有第三水平杆和第四水平杆,所述第三水平杆和第四水平杆的两端各通过一个滑动接头与第三限位杆和第四限位杆滑动连接,所述第一水平杆和第三水平杆上均滑动套设有一个第一滑动块,两个第一滑动块的侧壁上均设置有固定槽,第一调节杆的下端侧壁上设置有两个安装块,两个安装块分别位于两个第一滑动块上的固定槽内,所述第二水平杆和第四水平杆上均滑动套设有一个第二滑动块,两个第一滑动块的侧壁上均设置有固定槽,第二调节杆的下端侧壁上设置有两个安装块,两个安装块分别位于两个第二滑动块上的固定槽内;
10.所述第一限位杆、第二限位杆、第三限位杆和第四限位杆的一端贯穿第二基座板并与第三基座板连接,所述第二基座板与第三基座板之间设置有第五限位杆、第六限位杆、第七限位杆和第八限位板,所述第五限位杆和第一限位杆之间设置有第五水平杆,所述第三限位杆和第七限位杆之间设置有第六水平杆,所述第五水平杆和第六水平杆的两端各通过一个滑动接头与第一限位杆、第五限位杆、第三限位杆和第七限位杆滑动连接,所述第五水平杆和第六水平杆上各滑动套设有一第三滑动块,两个第三滑动块的侧壁均设置有固定槽,第三调节杆的下端侧壁上设置有两个安装块,两个安装块别位于别位于两个第三滑动块上的固定槽内;所述第六限位杆和第二限位杆之间设置有第七水平杆,所述第四限位杆和第八限位杆之间设置有第八水平杆,所述第七水平杆和第八水平杆的两端个通过一个滑动接头与第六限位杆、第二限位杆、第八限位杆和第四限位杆滑动连接,所述第七水平杆和第八水平杆各滑动套设有一第四滑动块,两个第四滑动块的侧壁均设置有固定槽,第四调节杆的下端侧壁上设置有两个安装块,两个安装块别位于别位于两个第四滑动块上的固定槽内;
11.所述第一调节杆、第二调节杆、第三调节杆和第四调节杆的上端各设置有一托板,静脉血管架设在第一调节杆、第二调节杆、第三调节杆和第四调节杆上端的托板上。
12.优选的,所述双目立体视觉系统包括设置在静脉血管支撑平台两侧的支撑架,所述两个支撑架的上方设置有横向布置的安装座,所述安装座两端的侧板之间设置有第一挡板和第二挡板,在第一挡板与安装座的一侧板之间设置有电机,所述电机的输出轴与螺纹杆一端连接,所述螺纹杆的另一端依次贯穿第一挡板和第二挡板,且与安装座的另一侧板转动连接,位于第一挡板与第二挡板之间的一部分螺纹杆上的螺纹旋转方向与第二挡板与安装座另一侧板之间的一部分螺纹杆上的的螺纹旋转方向相反,在螺纹杆的两端还各设置有一根导向杆,两根导向杆的两端分别贯穿第一挡板和第二挡板与安装座的两个侧板固定连接,所述螺纹杆上螺纹连接有第一安装台和第二安装台,所述第一安装台和第二安装台套设在两根导向杆上,且分别位于安装座侧板与第二挡板之间和第一挡板与第二挡板之间,所述第一安装台和第二安装台上各设置有一台相机。
13.优选的,所述消融手术训练导管包括套筒,所述套筒的远端设置有安装槽,所述安装槽内设置有发光二极管和绝缘弹簧,所述绝缘弹簧的一端连接发光二极管,所述绝缘弹簧的另一端与安装槽的底壁连接,所述绝缘弹簧内设置有导管头端,所述导管头端的远端设置有金属帽,所述导管头端的近端贯穿安装槽底部,所述安装槽内还设置有两根导线,所述一根导线的远端与发光二极管近端面连接,两根导线的近端均贯穿安装槽底部。
14.一种房颤消融术前模拟训练设备的训练方法,包括以下步骤:
15.步骤1:训练环境设计制作:
16.步骤101:用患者心脏的二维ct图像,重构stl格式的三维心脏模型,为重构的心脏模型绘制支撑面板,并采用3d打印技术用透明树脂打印具有支撑面板的实体心脏模型;
17.步骤102:基于opencascade7.4.0,在vs2015环境下搭建房颤消融术的虚拟训练环境;
18.步骤103:在虚拟训练环境中以读取心脏模型网格节点的方式,快速读取由患者ct图像重构的stl格式的三维心脏模型,同时将stl模型的网格节点设置为可选择的状态;
19.步骤104:为虚拟训练环境添加读取所选节点坐标的功能;
20.步骤105:在虚拟训练环境中的三维心脏模型表面框选一系列点,用选择的点拟合b样条曲面,拟合的b样条曲面,可作为消融术的标测区域;
21.步骤106:在标测区域内点选一系列点,用选择的点拟合消融术导管头端的理想路径,作为训练参考;
22.步骤107:搭建人体仿真训练环境;
23.步骤108:关闭虚拟训练环境中具有支撑面板的stl三维心脏模型,打开没有支撑面板的stl三维心脏模型
24.步骤2:训练环境的配准及训练
25.步骤201:由于实体心脏模型与stl格式心脏模型数据统一,可以采用三点配准法,实现虚拟训练环境和人体仿真训练环境中心脏模型的空间配准;
26.步骤202:参考虚拟训练环境中消融术导管的理想路径,在人体仿真训练环境中操作训练导管进行消融术导管的操作训练或特定病患的术前训练,心内膜三维标测训练达到理想效果后,进行消融训练;
27.步骤203:当消融术训练导管头端发光时,用双目立体视觉系统采集一系列心脏模型处的训练图像,依据空间点的三维重建原理,求取训练图像中消融术训练导管头端在世界坐标系中的坐标值;
28.步骤204:用求取的系列点坐标,在虚拟训练环境中拟合训练路径,比较训练路径与理想路径的重合度,即可对训练效果做出评估。
29.优选的,在步骤106中,拟合的具体过程是:
30.(1)将选取的系列点的坐标构成点集pset(x,y,z);
31.(2)基于三次b样条算法的表示方法,依据选取的型值点集反求出样条曲线控制点集合cpset(x,y,z);
32.(3)由样条曲线控制点集合根据三次样条曲线矩阵方程绘制出样条曲线路径。
33.优选的,在步骤107中,人体仿真训练环境模型搭建过程如下:
34.(1)搭建心脏模型支撑平台、静脉血管模型支撑平台、手术训练操作平台;其中,将静脉血管模型支撑平台放置在便于医生训练的方位,依据静脉血管模型支撑平台的方位,初步配制静脉血管、实体心脏模型、心脏模型支撑平台以及手术训练操作平台的位置;
35.(2)在世界坐标系中,平移旋转实体心脏模型,使其和虚拟训练环境中的心脏模型坐标统一,调节静脉血管位姿使其适应于当前病患;依据实体心脏模型的方位,将双目立体视觉系统架设在静脉血管模型支撑平台的上方,取双目立体视觉系统两台相机轴心连线的
中点为世界坐标系的原点;
36.(3)设计制作标测训练导管和消融训练导管;在标测训练中,训练导管头端保持常亮,需观察训练导管头端的感应电极是否与心脏模型内壁可靠接触;在消融训练中,当训练导管头端与心脏模型内壁可靠接触时,训练导管头端发光;
37.优选的,在步骤203中,求取训练图像中消融术训练导管头端在世界坐标系中的坐标值的具体过程为:
38.首先求解双目立体视觉系统的投影矩阵为:
[0039][0040]
测量的数据满足下式:
[0041]
km=u
ꢀꢀ
(1)
[0042]
其中:
[0043][0044]
m=(m
11
,m
12
,m
13
,m
14
,m
21
,m
22
,m
23
,m
24
,m
31
,m
32
,m
33
)
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0045]
u=(u1m
34
,v1m
34
,
…ꢀ…ꢀ…
,u
nm34
,v
nm34
)
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0046]
式中,n为点的个数,n=(1,
……
,20);
[0047]
借助于最小二乘法的原理,将式(2)转换成(6)的形式:
[0048]
m=(k
t
k)-1ktuꢀꢀ
(6)
[0049]
将非0常数和矩阵m相乘,(xw,yw,zw)与(u,v)与(u,v)的关系不会变化,则可以令m
34
=1,则公式(2)的未知量有11个,若已知空间中一点的(xw,yw,zw)及(u,v),就可以定义2个方程,相应的,若已知空间中6个点的(xw,yw,zw)与(u,v)与(u,v),就可以定义12个方程,此时m矩阵可以被求解;
[0050]
若当已知(xw,yw,zw)与(u,v)与(u,v)的点只有6个时,方程的求解会存在较大的误差。这里已知(xw,yw,zw)与(u,v)与(u,v)的点有20个,可以定义40个方程,并且借助最小二乘法原理进行求解,极大降低了求解投影矩阵过程中存在的误差;
[0051]
在求解得到双目立体视觉系统的投影矩阵,测量获取训练导管头端轨迹点在c1中的(u1,v1)及在c2中的(u2,v2)之后,即可求得当前轨迹点的(x,y,z);在求解计算的过程中,借助于最小二乘法原理,使数据噪声引入的误差最小,可以将式(7)与(8)用矩阵的形式表示,效果如式(9);
[0052][0053]
[0054][0055]
将(9)式简写为:
[0056]
ax=b
ꢀꢀ
(10)
[0057]
借助于最小二乘法的原理,将式(10)转换成(11)的形式:
[0058]
x=(a
t
a)-1atbꢀꢀ
(11)
[0059]
编程求解式(11),将已知数据带入可求得当前训练导管头端在世界坐标系中的坐标值。
[0060]
优选的,在步骤204中,重合度的评价标准在于计算消融术训练导管头端理想路径与实际路径间的双向豪斯多夫距离,其具体过程为:
[0061]
(1)获取曲线样条曲线spline1上的所有点,并将选取的点设置为pset1;
[0062]
(2)计算pset1到实际曲线距离,并将数值转入变量之中,利用if语句判断该数值是否为所有距离中的最大值,如果是则单向豪斯多夫距离计算成功;
[0063]
(3)获取曲线样条曲线spline2上的点并设置为pset2,计算pset2到实际曲线距离,并将数值转入变量之中,利用if语句判断该数值是否为所有距离中的最大值;
[0064]
(4)将步骤(2)中获取的最大值与步骤(3)中获取的最大值进行比较,取两个最大值中较大的值作为双向豪斯多夫距离,距离越小,则差异性越小。
[0065]
本发明的有益效果:
[0066]
1、本发明对消融术训练导管的行进路径进行了规划,为术前训练提供了参考,可以有效提高训练效果。
[0067]
2、本发明的训练设备可实现心血管三维位姿的调整,同一台设备可适应于不同的病患,满足病患情况复杂的实际情况。
[0068]
3、本发明提出的用于在房颤消融术前训练术者的模拟训练设备,在术前通过训练设备进行训练,避免了因缺乏经验直接在人体进行手术的系列问题。
[0069]
4、本发明提出的用于在房颤消融术前训练术者的手术训练设备可为大量缺乏手术经验的医生提供不限次数的训练机会。
附图说明
[0070]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0071]
图1所示为训练环境使用流程。
[0072]
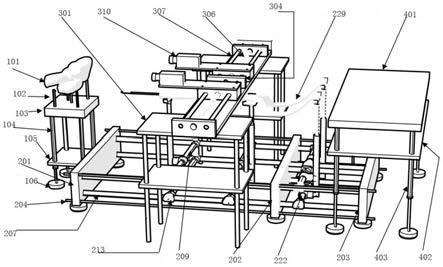
图2所示为人体仿真训练环境模型。
[0073]
图3所示为图2中静脉血管支撑平台的示意图。
[0074]
图4所示为图2中双目立体视觉系统的示意图。
[0075]
图5所示为双目立体视觉系统下完成空间配准的训练环境。
[0076]
图6所示为消融术训练导管头端结构示意。
[0077]
图7所示为虚拟训练环境中心脏模型节点坐标的读取。
[0078]
图8所示为虚拟训练环境中消融术标测区域的绘制。
[0079]
图9所示为虚拟训练环境中导管理想路径的绘制。
[0080]
图10所示为虚拟训练环境中训练路径与理想路径的重合度对比。
[0081]
其中,1、心脏模型支撑平台;101、心脏模型;102、心脏支撑杆;103、心脏支撑板;104、第一圆管;105、支撑台加固板;106、调平调高地脚;
[0082]
2、静脉血管支撑平台;201、第一基座板;202、第二基座板;203、第三基座板;204、紧固丝杆;205、第一限位杆;206、第二限位杆;207、第三限位杆;208、第四限位杆;209、第一水平杆;210、第二水平杆;211、第三水平杆;212、第四水平杆;213、滑动接头;214、第一调节杆;215、第二调节杆;216、第一滑动块;217、第二滑动块;218、第五限位杆;219、第六限位杆;220、第七限位杆;221、第五水平杆;222、第六水平杆;223、第三滑动块;224、第七水平杆;225、第四滑动块;226、第三调节杆;227、第四调节杆;228、托板;229、静脉血管;
[0083]
3、双目立体视觉系统;301、支撑架;302、安装座;303、第一挡板;304、第二挡板;305、电机;306、螺纹杆;307、导向杆;308、第一安装台;309、第二安装台;310、相机;
[0084]
4、手术训练操作平台;401、操作台面板;402、操作台加固板;403、调平调高地脚;
[0085]
5、消融手术训练导管;501、套筒;502、发光二极管;503、绝缘弹簧;504、导管头端;505、金属帽;506、导线;
具体实施方式
[0086]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
[0087]
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0088]
本实施例提供了一种房颤消融术前模拟训练设备,如图2-6所示,包括心脏模型支撑平台1、静脉血管支撑平台2、手术训练操作平台4以及消融手术训练导管5,所述静脉血管支撑平台1位于便于医生训练的方位,静脉血管229架设在静脉血管支撑平台上,所述手术训练操作平台4位于静脉血管支撑平台2的后方,所述心脏模型支撑平台1位于静脉血管支撑平台2的前方,所述手术训练操作平台4、静脉血管支撑平台2以及心脏模型支撑平台1位于同一水平轴线上,在静脉血管模型支撑平台2上方设置有双目立体视觉系统3,所述消融手术训练导管5贯穿静脉血管229进行消融训练。
[0089]
其中,所述心脏模型支撑平台1包括心脏支撑板103、心脏支撑杆102和心脏模型101,所述心脏支撑杆102设置于心脏支撑板103的上端面,所述心脏模型101安装在心脏支撑杆102的上端,所述心脏支撑板103的下方设置有支撑台加固板105,所述支撑台加固板105的上端面与心脏支撑板103下端面之间通过多根第一圆管104连接,所述支撑台加固板
105的下端面的四角处各设置有一调平调高地脚106。调平调高地脚106可以调节支撑板的高度,从而实现心脏模型101在z方向上的移动,同时可左右前后移动心脏支撑平台1,从而实现心脏模型101在x、y方向上的调节。
[0090]
其中,所述静脉血管支撑平台2包括同水平轴线设置的第一基座板201、第二基座板202和第三基座板203,所述第一基座板201、第二基座板202和第三基座板203的底部两端均设置有底座,所述第一基座板201的侧壁四角各设置有一根紧固丝杆204,所述紧固丝杆204的另一端依次贯穿第二基座板202和第三基座板203,所述第一基座板201与第二基座板202之间设置有第一限位杆205、第二限位杆206、第三限位杆207和第四限位杆208,所述第一限位杆205和第二限位杆206之间设置有第一水平杆209和第二水平杆210,所述第一水平杆209和第二水平杆210的两端各通过一个滑动接头213与第一限位杆214和第二限位杆215滑动连接,所述第三限位杆207和第四限位杆208之间设置有第三水平杆211和第四水平杆212,所述第三水平杆212和第四水平杆212的两端各通过一个滑动接头213与第三限位杆207和第四限位杆208滑动连接,所述第一水平杆209和第三水平杆211上均滑动套设有一个第一滑动块216,两个第一滑动块216的侧壁上均设置有固定槽,第一调节杆214的下端侧壁上设置有两个安装块,两个安装块分别位于两个第一滑动块216上的固定槽内,所述第二水平杆210和212第四水平杆上均滑动套设有一个217第二滑动块,两个216第一滑动块的侧壁上均设置有固定槽,215第二调节杆的下端侧壁上设置有两个安装块,两个安装块分别位于两个215第二滑动块上的固定槽内;
[0091]
所述第一限位杆205、第二限位杆206、第三限位杆207和第四限位杆208的一端贯穿第二基座板202并与第三基座板203连接,所述第二基座板202并与第三基座板203之间设置有第五限位杆218、第六限位杆219、第七限位杆220和第八限位板,所述第五限位杆218和第一限位杆205之间设置有第五水平杆221,所述第三限位杆207和第七限位杆220之间设置有第六水平杆222,所述第五水平杆221和第六水平杆222的两端各通过一个滑动接头213与第一限位杆205、第五限位杆218、第三限位杆207和第七限位杆220滑动连接,所述第五水平杆221和第六水平杆222上各滑动接头213设有一第三滑动块223,两个第三滑动块223的侧壁均设置有固定槽,第三调节杆226的下端侧壁上设置有两个安装块,两个安装块别位于别位于两个第三滑动块223上的固定槽内;所述第六限位杆219和第二限位杆206之间设置有第七水平杆224,所述第四限位杆208和第八限位杆之间设置有第八水平杆,所述第七水平杆224和第八水平杆的两端个通过一个滑动接头213与第六限位杆219、第二限位杆206、第八限位杆和第四限位杆208滑动连接,所述第七水平杆224和第八水平杆各滑动套设有一第四滑动块225,两个第四滑动块225的侧壁均设置有固定槽,第四调节杆227的下端侧壁上设置有两个安装块,两个安装块别位于别位于两个第四滑动块225上的固定槽内;
[0092]
所述第一调节杆214、第二调节杆215、第三调节杆226和第四调节杆227的上端各设置有一托板228,静脉血管229架设在第一调节杆214、第二调节杆215、第三调节杆226和第四调节杆227上端的托板228上。
[0093]
在本实施例中,第一调节杆214、第二调节杆215、第三调节杆226和第四调节杆227均可实现竖直方向的调整,从而实现静脉血管229在z方向上的调整,第一调节杆214随着第一水平杆209和第三水平杆211沿着第一限位杆205、第二限位杆206、第三限位杆207和第四限位杆208水平移动,同样的,第二调节杆215可随着第二水平杆210和第四水平杆212沿着
第一水平杆209和第三水平杆211沿着第一限位杆205、第二限位杆206、第三限位杆207和第四限位杆208水平移动;同时,第三调节杆226随着第五水平杆221和第六水平杆222沿着第一限位杆205、第三限位杆207、第五限位杆218、第七限位杆220水平移动,第四调节杆220随着第七水平杆224和第八水平杆沿着第六限位杆219、第八限位杆、第二限位杆206和第四限位杆208水平移动,从而实现静脉血管229在x方向上的调节;另外,可移动第一基座板201、第二基座板202和第三基座板203从而实现静脉血管229在y方向上的调节,从而实现静脉血管209在三维空间的位姿调整。
[0094]
其中,所述双目立体视觉系统1包括设置在静脉血管支撑平台2两侧的支撑架301,所述两个支撑架301的上方设置有横向布置的安装座302,所述安装座302两端的侧板之间设置有第一挡板303和第二挡板304,在第一挡板303与安装座302的一侧板之间设置有电机305,所述电机305的输出轴与螺纹杆306一端连接,所述螺纹杆306的另一端依次贯穿第一挡板303和第二挡板304,且与安装座302的另一侧板转动连接,位于第一挡板303与第二挡板304之间的一部分螺纹杆306上的螺纹旋转方向与第二挡板304与安装座302另一侧板之间的一部分螺纹杆306上的的螺纹旋转方向相反,在螺纹杆306的两端还各设置有一根导向杆307,两根导向杆307的两端分别贯穿第一挡板303和第二挡板304与安装座302的两个侧板固定连接,所述螺纹杆306上螺纹连接有第一安装台308和第二安装台309,所述第一安装台308和第二安装台309套设在两根导向杆307上,且分别位于安装座302侧板与第二挡板304之间和第一挡板303与第二挡板304之间,所述第一安装台308和第二安装台309上各设置有一台相机310。
[0095]
在本实施例中,相机310底部可通过一个转动座与第一安装台308或第二安装台309连接,相机310则可随着转动座旋转,从而给调整相机310的角度。该转动座可采用常规转动结构即可。
[0096]
其中,所述手术训练操作平台4包括操作台面板401和操作台加固板402,所述操作台面板401和操作台加固板402之间设置有第二圆管实现连接,所述操作台加固板402的下端面四角各设置有调平调高地脚403。
[0097]
其中,所述消融手术训练导管5包括套筒501,所述套筒501的远端设置有安装槽,所述安装槽内设置有发光二极管502和绝缘弹簧503,所述绝缘弹簧503的一端连接发光二极管502,所述绝缘弹簧503的另一端与安装槽的底壁连接,所述绝缘弹簧503内设置有导管头端504,所述导管头端504的远端设置有金属帽505,所述导管头端504的近端贯穿安装槽底部,所述安装槽内还设置有两根导线506,所述一根导线506的远端与发光二极管502近端面连接,两根导线506的近端均贯穿安装槽底部。
[0098]
在确定病患为心房颤动患者,为其拍摄心脏ct图像,依据电生理信息确定消融术标测区域及消融术导管的行进路径后,一种用于在房颤消融术前训练术者的手术训练设备,训练方法如图1、图7-10所示,包括如下步骤:
[0099]
步骤1:训练环境设计制作:
[0100]
步骤101:用患者心脏的二维ct图像,重构stl格式的三维心脏模型,为重构的心脏模型绘制支撑面板,并采用3d打印技术用透明树脂打印具有支撑面板的实体心脏模型;
[0101]
步骤102:基于opencascade7.4.0,在vs2015环境下搭建房颤消融术的虚拟训练环境;
[0102]
步骤103:在虚拟训练环境中以读取心脏模型网格节点的方式,快速读取由患者ct图像重构的stl格式的三维心脏模型,同时将stl模型的网格节点设置为可选择的状态;
[0103]
步骤104:为虚拟训练环境添加读取所选节点坐标的功能;
[0104]
步骤105:在虚拟训练环境中的三维心脏模型表面框选一系列点,用选择的点拟合b样条曲面,拟合的b样条曲面,可作为消融术的标测区域;
[0105]
步骤106:在标测区域内点选一系列点,用选择的点拟合消融术导管头端的理想路径,作为训练参考;
[0106]
拟合的具体过程是:
[0107]
(1)将选取的系列点的坐标构成点集pset(x,y,z);
[0108]
(2)基于三次b样条算法的表示方法,依据选取的型值点集反求出样条曲线控制点集合cpset(x,y,z);
[0109]
(3)由样条曲线控制点集合根据三次样条曲线矩阵方程绘制出样条曲线路径。
[0110]
步骤107:搭建人体仿真训练环境;
[0111]
(1)搭建心脏模型支撑平台、静脉血管模型支撑平台、手术训练操作平台;其中,将静脉血管模型支撑平台放置在便于医生训练的方位,依据静脉血管模型支撑平台的方位,初步配制静脉血管、实体心脏模型、心脏模型支撑平台以及手术训练操作平台的位置;
[0112]
(2)在世界坐标系中,平移旋转实体心脏模型,使其和虚拟训练环境中的心脏模型坐标统一,调节静脉血管位姿使其适应于当前病患;依据实体心脏模型的方位,将双目立体视觉系统架设在静脉血管模型支撑平台的上方,取双目立体视觉系统两台相机轴心连线的中点为世界坐标系的原点;
[0113]
(3)设计制作标测训练导管和消融训练导管;在标测训练中,训练导管头端保持常亮,需观察训练导管头端的感应电极是否与心脏模型内壁可靠接触;在消融训练中,当训练导管头端与心脏模型内壁可靠接触时,训练导管头端发光;
[0114]
步骤108:关闭虚拟训练环境中具有支撑面板的stl三维心脏模型,打开没有支撑面板的stl三维心脏模型
[0115]
步骤2:训练环境的配准及训练
[0116]
步骤201:由于实体心脏模型与stl格式心脏模型数据统一,可以采用三点配准法,实现虚拟训练环境和人体仿真训练环境中心脏模型的空间配准;
[0117]
步骤202:参考虚拟训练环境中消融术导管的理想路径,在人体仿真训练环境中操作训练导管进行消融术导管的操作训练或特定病患的术前训练,心内膜三维标测训练达到理想效果后,进行消融训练;
[0118]
步骤203:当消融术训练导管头端发光时,用双目立体视觉系统采集一系列心脏模型处的训练图像,依据空间点的三维重建原理,求取训练图像中消融术训练导管头端在世界坐标系中的坐标值;
[0119]
其过程如下:
[0120]
首先求解双目立体视觉系统的投影矩阵为:
[0121]
[0122]
测量的数据满足下式:
[0123]
km=u
ꢀꢀ
(1)
[0124]
其中:
[0125][0126]
m=(m
11
,m
12
,m
13
,m
14
,m
21
,m
22
,m
23
,m
24
,m
31
,m
32
,m
33
)
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0127]
u=(u1m
34
v1m
34
,
…ꢀ…ꢀ…
,u
nm34
,vnn
34
)
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0128]
式中,n为点的个数,n=(1,
……
,20);
[0129]
借助于最小二乘法的原理,将式(2)转换成(6)的形式:
[0130]
m=(k
t
k)-1ktuꢀꢀꢀꢀ
(6)
[0131]
将非0常数和矩阵m相乘,(xw,yw,zw)与(u,v)与(u,v)的关系不会变化,则可以令m
34
=1,则公式(2)的未知量有11个,若已知空间中一点的(xw,yw,zw)及(u,v),就可以定义2个方程,相应的,若已知空间中6个点的(xw,yw,zw)与(u,v)与(u,v),就可以定义12个方程,此时m矩阵可以被求解;
[0132]
若当已知(xw,yw,zw)与(u,v)与(u,v)的点只有6个时,方程的求解会存在较大的误差。这里已知(xw,yw,zw)与(u,v)与(u,v)的点有20个,可以定义40个方程,并且借助最小二乘法原理进行求解,极大降低了求解投影矩阵过程中存在的误差;
[0133]
在求解得到双目立体视觉系统的投影矩阵,测量获取训练导管头端轨迹点在c1中的(u1,v1)及在c2中的(u2,v2)之后,即可求得当前轨迹点的(x,y,z);在求解计算的过程中,借助于最小二乘法原理,使数据噪声引入的误差最小,可以将式(7)与(8)用矩阵的形式表示,效果如式(9);
[0134][0135][0136][0137]
将(9)式简写为:
[0138]
ax=b
ꢀꢀ
(10)
[0139]
借助于最小二乘法的原理,将式(10)转换成(11)的形式:
[0140]
x=(a
t
a)-1atbꢀꢀ
(11)
[0141]
编程求解式(11),将已知数据带入可求得当前训练导管头端在世界坐标系中的坐
标值。
[0142]
步骤204:用求取的系列点坐标,在虚拟训练环境中拟合训练路径,比较训练路径与理想路径的重合度,即可对训练效果做出评估。
[0143]
重合度的评价标准在于计算消融术训练导管头端理想路径与实际路径间的双向豪斯多夫距离,其具体过程为:
[0144]
(1)获取曲线样条曲线spline1上的所有点,并将选取的点设置为pset1;
[0145]
(2)计算pset1到实际曲线距离,并将数值转入变量之中,利用if语句判断该数值是否为所有距离中的最大值,如果是则单向豪斯多夫距离计算成功;
[0146]
(3)获取曲线样条曲线spline2上的点并设置为pset2,计算pset2到实际曲线距离,并将数值转入变量之中,利用if语句判断该数值是否为所有距离中的最大值;
[0147]
(4)将步骤(2)中获取的最大值与步骤(3)中获取的最大值进行比较,取两个最大值中较大的值作为双向豪斯多夫距离,距离越小,则差异性越小。
[0148]
本发明对消融术训练导管的行进路径进行了规划,为术前训练提供了参考,可以有效提高训练效果;在术前通过训练设备进行训练,避免了因缺乏经验直接在人体进行手术的系列问题。本发明提出的用于在房颤消融术前训练术者的手术训练设备可为大量缺乏手术经验的医生提供不限次数的训练机会。
[0149]
以上所述,仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其它修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1