用于摄像模组的驱动装置和摄像模组的制作方法
1.本技术涉及摄像模组领域,尤其涉及用于摄像模组的驱动装置和摄像模组,其中,所述驱动装置能够通过一个光学防抖载体实现在两个方向上的光学防抖。
背景技术:
2.随着移动电子设备的普及,被应用于移动电子设备的用于帮助使用者获取影像(例如视频或者图像)的摄像模组的相关技术得到了迅猛的发展和进步。
3.马达(也就是,驱动装置)是摄像模组非常重要的部件,在摄像模组的工作过程中,马达可以驱动光学镜头进行移动,以实现拍摄过程中的光学对焦(auto focus:af)和/或光学防抖(optical image stabilization:ois)功能。
4.典型的实现光学对焦和光学防抖功能的思路是:在运动件上安装磁铁(或者线圈),并在固定件上安装线圈(或者磁铁),然后,通过磁铁与线圈之间的电磁力来驱动承载镜头的运动件沿着光轴方向移动以实现光学对焦或者垂直光轴的方向移动以实现光学防抖。
5.在现有的马达中,为同时实现光学对焦和光学防抖功能,通常需要设置两个光学防抖框架(即,两个光学防抖运动件)和一个自动对焦框架(即,一个自动对焦运动件),其中,两个光学防抖框架用于实现驱动光学镜头在垂直光轴方向的平面内运动,一个自动对焦框架用于实现驱动光学镜头沿着光轴的方向运动,例如,在专利号为cn104977783所揭露的马达方案中。并且,在专利号为cn104977783所揭露的马达方案中,其还包括用于承载光学镜头的框架,也就是,在该专利中,马达至少包括四个框架。
6.应可以理解,过多的框架数量会导致需要较大的驱动力才能实现驱动。并且,框架数量较多还会影响马达的整体的高度,进而影响摄像模组的整体高度。
7.因此,需要一种优化的驱动装置的结构设计方案,以在满足实现光学性能调整的前提下,具有更优的性能和物理参数配置。
技术实现要素:
8.本技术的一优势在于提供一种用于摄像模组的驱动装置和摄像模组,其中,所述驱动装置能够通过较少数量的载体(即,现有技术中的框架)来实现诸如光学防抖和光学对焦之类的光学性能调整功能。
9.本技术的另一优势在于提供一种用于摄像模组的驱动装置和摄像模组,其中,所述驱动装置能够通过一个光学防抖载体实现在两个方向上的光学防抖。
10.本技术的另一优势在于提供一种用于摄像模组的驱动装置和摄像模组,其中,由于所述驱动装置的载体数量的较少,因此,在实现光学防抖和光学对焦的过程中,需要的驱动力相对较小,以利于驱动控制且能够缩减功耗。
11.本技术的另一优势在于提供一种用于摄像模组的驱动装置和摄像模组,其中,由于所述驱动装置的载体数量的较少,所述驱动装置具有相对更低的高度,从而所述摄像模
组的整体高度能够降低。
12.本技术的另一优势在于提供一种用于摄像模组的驱动装置和摄像模组,其中,在本技术一些示例中,所述光学镜头被一体地设置于所述驱动装置的所述第一载体或所述第二载体,以使得一方面无需为所述光学镜头配置现有的镜筒结构,另一方面,也无需为所述光学镜头提供额外的支撑载体,从而一方面可以去掉镜筒的厚度尺寸,另一方面,还可以缩减所述驱动装置的载体数量。也就是,在本技术一些示例中,所述光学镜头与所述驱动装置的载体具有一体式结构。
13.通过下面的描述,本技术的其它优势和特征将会变得显而易见,并可以通过权利要求书中特别指出的手段和组合得到实现。
14.为实现上述至少一优势,本技术提供一种用于摄像模组的驱动装置,其包括:
15.外壳体;
16.被收容于所述外壳体内的框架;以及
17.被收容于所述框架内的载体组件,包括第二载体、第一载体和支撑件,所述第一载体被设置于所述第二载体和所述支撑件形成的收容空间内,所述第一载体被配置为安装镜头模块于其内;
18.其中,所述载体组件的第二载体被配置能够相对于所述框架沿着光轴方向运动以带动所述第一载体沿着光轴方向运动;
19.其中,所述载体组件的第一载体被配置能够相对于所述第二载体沿着垂直于所述光轴的第一方向以及垂直于所述光轴和所述第一方向两者的第二方向运动。
20.在上述用于摄像模组的驱动装置中,所述支撑件结合于所述第二载体并与所述第二载体相配合形成用于收容所述第一载体于其内的所述收容空间。
21.在上述用于摄像模组的驱动装置中,所述支撑件包括主支撑板和自所述主支撑板的转角区域往下延伸的至少一延伸腿,所述主支撑板被设置于所述第一载体的上方且所述至少一延伸腿结合于所述第二载体。
22.在上述用于摄像模组的驱动装置中,所述支撑件与所述第一载体之间设有第一可动部,所述第一可动部被配置为提供所述第一载体沿着所述第一方向和/或所述第二方向的运动。
23.在上述用于摄像模组的驱动装置中,所述第一可动部包括适于沿着所述第一方向和/或所述第二方向滚动的至少一滚珠。
24.在上述用于摄像模组的驱动装置中,所述支撑件与所述第一载体之间设有与所述第一可动部相关联的第一容纳部。
25.在上述用于摄像模组的驱动装置中,所述第一容纳部包括用于容纳所述至少一滚珠的收容槽。
26.在上述用于摄像模组的驱动装置中,所述第一容纳部的形状和延伸方向使得所述第一容纳部被配置为引导所述第一载体沿着所述第一方向和/或所述第二方向的运动。
27.在上述用于摄像模组的驱动装置中,所述第一载体与所述第二载体之间设有第二可动部,所述第二可动部被配置为提供沿着所述第一方向和/或所述第二方向的运动。
28.在上述用于摄像模组的驱动装置中,所述第二可动部包括适于沿着所述第一方向和/或所述第二方向滚动的至少一滚珠。
29.在上述用于摄像模组的驱动装置中,所述第一载体与所述第二载体之间设有与所述第二可动部相关联的第二容纳部。
30.在上述用于摄像模组的驱动装置中,所述第二容纳部包括用于容纳所述至少一滚珠的收容槽。
31.在上述用于摄像模组的驱动装置中,所述第二容纳部的形状和延伸方向使得所述第二容纳部被配置为引导所述第一载体沿着所述第一方向和/或所述第二方向的运动。
32.在上述用于摄像模组的驱动装置中,所述第一可动部和所述第二可动部分别被设置于所述第一载体的上侧和与所述上侧相对的下侧。
33.在上述用于摄像模组的驱动装置中,所述第二载体与所述框架之间第三可动部,所述第三可动部被配置为提供所述第二载体相对于所述框架沿着光轴方向的运动。
34.在上述用于摄像模组的驱动装置中,所述第三可动部包括适于沿着所述光轴方向滚动的至少一滚珠。
35.在上述用于摄像模组的驱动装置中,所述第二载体与所述框架之间与所述第三可动部相关联的第三容纳部。
36.在上述用于摄像模组的驱动装置中,所述第三容纳部包括用于容纳所述至少一滚珠的收容槽。
37.在上述用于摄像模组的驱动装置中,所述第一载体具有用于安装镜头模块的镜筒于其内的安装腔。
38.在上述用于摄像模组的驱动装置中,所述驱动装置进一步包括用于驱动所述第一载体相对于所述第二载体沿着垂直于所述光轴的第一方向以及垂直于所述光轴和所述第一方向两者的第二方向运动的第一驱动部。
39.在上述用于摄像模组的驱动装置中,所述第一驱动部包括被设置于所述第一载体的至少一第一磁体和被设置面对所述至少一第一磁体的至少一第一线圈。
40.在上述用于摄像模组的驱动装置中,所述驱动装置进一步包括用于驱动所述第二载体相对于所述框架沿着光轴方向运动的第二驱动部。
41.在上述用于摄像模组的驱动装置中,所述第二驱动部包括设置于所述第二载体的至少一第二磁体和被设置面对于所述至少一第二磁体的至少一第二线圈。
42.在上述用于摄像模组的驱动装置中,所述驱动装置进一步包括设置于所述第二载体上且沿所述光轴方向面向所述第一载体的至少一第一磁轭,所述至少一第一磁轭能够与设置于所述第一载体的至少一第一磁体相配合以提供拉回所述第一载体的回动力。
43.在上述用于摄像模组的驱动装置中,所述驱动装置进一步包括设置于所述框架且沿所述光轴方向面向所述第二载体的至少一第二磁轭,所述至少一第二磁轭能够与设置于所述第二载体的至少一第二磁体相配合以提供拉回所述第二载体的回动力。
44.在上述用于摄像模组的驱动装置中,所述驱动装置进一步包括设置于所述第一载体和所述第二载体之间的第一弹性元件,以通过所述第一弹性元件提供拉回所述第一载体的回动力。
45.在上述用于摄像模组的驱动装置中,所述驱动装置进一步包括设置于所述第二载体和所述框架之间的第二弹性元件254,以通过所述第二弹性元件254提供拉回所述第二载体的回动力。
46.根据本技术的另一方面,还提供了一种用于摄像模组的驱动装置,其包括:
47.外壳体;
48.被收容于所述外壳体内的框架;以及
49.被收容于所述框架内的载体组件,包括第二载体、第一载体和支撑件,所述第二载体被设置于所述第一载体和所述支撑件形成的收容空间内,所述第二载体被配置为安装镜头模块于其内;
50.其中,所述载体组件的第二载体被配置能够相对于所述框架沿着光轴方向运动;
51.其中,所述载体组件的第一载体被配置能够相对于所述第二载体沿着垂直于所述光轴的第一方向以及垂直于所述光轴和所述第一方向两者的第二方向运动以带动所述第二载体沿着所述第一方向和第二方向运动。
52.根据本技术的又一方面,还提供了一种摄像模组,其包括如上所述的驱动装置,以通过所述驱动装置实现所述摄像模组的光学对焦和/或光学防抖功能。
53.通过对随后的描述和附图的理解,本技术进一步的目的和优势将得以充分体现。
54.本技术的这些和其它目的、特点和优势,通过下述的详细说明,附图和权利要求得以充分体现。
附图说明
55.通过结合附图对本技术实施例进行更详细的描述,本技术的上述以及其他目的、特征和优势将变得更加明显。附图用来提供对本技术实施例的进一步理解,并且构成说明书的一部分,与本技术实施例一起用于解释本技术,并不构成对本技术的限制。在附图中,相同的参考标号通常代表相同部件或步骤。
56.图1图示了根据本技术实施例的摄像模组的示意图。
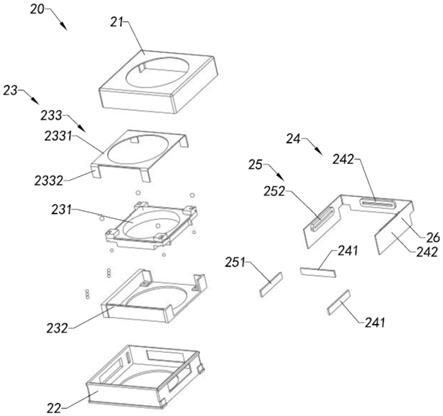
57.图2图示了根据本技术实施例的所述摄像模组中驱动装置的爆炸示意图。
58.图3图示了根据本技术实施例的所述驱动装置中载体组件的示意图。
59.图4图示了根据本技术实施例的所述载体组件的立体示意图。
60.图5图示了根据本技术实施例的所述载体组件的另一立体示意图。
61.图6图示了根据本技术实施例的所述驱动装置的另一爆炸示意图。
62.图7图示了根据本技术实施例的所述驱动装置中第一驱动部和第二驱动部的示意图。
63.图8图示了根据本技术实施例的所述驱动装置的第一变形实施中载体组件的示意图。
64.图9图示了根据本技术实施例的所述驱动装置的该第一变形实施中所述载体组件的立体示意图。
65.图10图示了根据本技术实施例的所述驱动装置的第二变形实施中载体组件的示意图。
66.图11图示了根据本技术实施例的所述驱动装置的该第二变形实施中所述载体组件的立体示意图。
67.图12图示了根据本技术实施例的所述驱动装置的第三变形实施中载体组件的示意图。
68.图13图示了根据本技术实施例的所述驱动装置的该第三变形实施中所述载体组件和框架之间的爆炸示意图。
69.图14图示了根据本技术实施例的所述驱动装置的第四变形实施的示意图。
70.图15图示了根据本技术实施例的所述驱动装置的第五变形实施的示意图。
71.并且,在附图中,为了清楚起见,可夸大元件的形状和尺寸,并且相同的标号将用于指示相同或者相似的元件。
具体实施方式
72.下面,将参考附图详细地描述根据本技术的示例实施例。显然,所描述的实施例仅仅是本技术的一部分实施例,而不是本技术的全部实施例,应理解,本技术不受这里描述的示例实施例的限制。
73.示例性摄像模组及其驱动装置
74.这里,为了便于描述将限定关于方向的术语。如图1至图15所示,光轴方向(z轴方向)指的是所述光学镜头的竖直方向,第一方向(x轴方向)指垂直于光轴方向(z轴方向)的方向,第二方向(y轴方向)指的是垂直于光轴方向(z轴方向)和第一方向(x轴方向)两者的方向。值得一提的是,这些限定仅用于说明的目的,并不构成对权利要求的限制。
75.如图1至图7所示,根据本技术实施例的摄像模组被阐明,其中,所述摄像模组包括:光学镜头10、驱动装置20和感光组件30。具体地,所述感光组件30包括用于成像的感光芯片31,所述驱动装置20被安装于所述感光组件30上,所述光学镜头10以被安装于所述驱动装置20的方式被保持于所述感光组件30的感光路径上,其中,所述驱动装置20用于驱动所述光学镜头10移动以实现诸如光学对焦和光学防抖之类的光学性能调整功能,以使得被摄目标能够清晰地在所述感光组件30的感光芯片31上成像。
76.如图1所示,在本技术实施例中,除所述感光芯片31外,所述感光组件30还包括作为安装基板的线路板32、安装于所述线路板32上的镜座33、以及,被保持于所述感光芯片31的感光路径上的滤光元件34等部件。当然,如图1所示例的所述感光组件30并不为本技术所局限,在本技术一些具体的示例中,其还可以包括其他部件,例如,用于支持所述滤光元件34的滤光元件34之间、设置于所述线路板32背面的加强板等。
77.在本技术实施例中,所述光学镜头10可被实施为现有的光学镜头(即,包括镜筒和安装于所述镜筒内的至少一光学透镜),其中,所述光学镜头10以其镜筒被固定于所述驱动装置20的方式被安装于所述驱动装置20内。优选地,在本技术实施例中,所述光学镜头10与所述驱动装置20的载体具有一体式结构,即,所述驱动装置20的载体作为所述光学镜头10的镜筒,以使得一方面无需为所述光学镜头10配置现有的镜筒结构,另一方面,也无需为所述光学镜头10提供额外的支撑载体,从而一方面可以去掉镜筒的厚度尺寸,另一方面,还可以缩减所述驱动装置20的载体数量,关于此方面内容将在描述所述驱动装置20的结构时具体展开。
78.如图2所示,在本技术实施例中,所述驱动装置20,包括:外壳体21、框架22、载体组件23、第一驱动部24和第二驱动部24,其中,所述外壳体21具有沿着光轴方向的开口,所述框架22被收容于所述外壳体21内,所述载体组件23被收容于所述框架22内,所述载体组件23包括第一载体231、第二载体232和支撑件233,所述第一载体231被设置于所述第二载体
232和所述支撑件233形成的收容空间230内。
79.特别地,在本技术实施例中,所述光学镜头10被安装于所述第一载体231内。具体地,当所述光学镜头10为传统的光学镜头10时,所述光学镜头10以其镜筒被卡合或粘合于所述第一载体231的方式被安装于所述第一载体231内,从而当所述第一载体231被移动时,所述光学镜头10能够被带动。当所述光学镜头10被实施为一体式光学镜头10时,所述第一载体231作为镜筒用于收容所述光学镜头10的至少一光学透镜,因此,所述光学镜头10无需配置其现有的镜筒结构。应可以理解,当所述光学镜头10被实施为一体式光学镜头10式,即,所述第一载体231充当所述光学镜头10的镜筒时,所述光学镜头10和所述第一载体231的整体尺寸可得以缩减,以实现缩减所述摄像模组的尺寸的目的。
80.为了实现光学对焦,在本技术实施例中,所述载体组件23的第二载体232被配置能够相对于所述框架22沿着光轴方向运动以带动所述第一载体231沿着光轴方向运动。应可以理解,所述光学镜头10被设置于所述第一载体231,因此,当所述第一载体231被所述第二载体232带动以沿着所述光轴方向上下移动时,所述光学镜头10与所述感光芯片31之间的距离作出调整以实现光学对焦。也就是,在本技术实施例中,所述第二载体232为光学对焦载体。
81.为了实现光学防抖,在本技术实施例中,所述载体组件23的第一载体231被配置能够相对于所述第二载体232沿着垂直于所述光轴的第一方向以及垂直于所述光轴和所述第一方向两者的第二方向运动。应可以理解,所述光学镜头10被设置于所述第一载体231,因此,当所述第一载体231被配置能够相对于所述第二载体232沿着垂直于所述光轴的第一方向以及垂直于所述光轴和所述第一方向两者的第二方向运动时,所述光学镜头10被带动在沿着垂直于所述光轴的平面内移动以实现光学防抖。也就是,在本技术实施例中,所述第一载体231为光学防抖载体。
82.应注意到,如前所述,在现有的马达方案中,通常设置两个光学防抖载体(或者说,光学防抖框架),一个光学防抖载体实现x轴方向的移动、另一个光学防抖载体实现y轴方向的移动。相应地,在本技术实施例中,所述驱动装置20通过一个载体,即仅通过所述第一载体231便实现了在两个方向上的移动。也就是,相较于现有的马达方案,根据本技术的所述驱动装置20具有相对较少的载体数量,因此,在实现光学防抖的过程中,需要的驱动力相对较小,以利于驱动控制且能够缩减功耗。
83.具体地,在本技术实施例中,如图2至图6所示,所述第一载体231被收容于所述第二载体232内或者被设置于所述第二载体232上,所述支撑件233被设置于所述第一载体231的上方并且结合于所述第二载体232,以与所述第二载体232相配合形成用于收容所述第一载体231于其内的所述收容空间230。也就是,在本技术实施例中,所述第一载体231、所述第二载体232和所述支撑件233被组装在一起。
84.应注意到,在所述载体组件23中,所述第一载体231位于所述载体组件23的中部位置(即,所述第一载体231在所述载体组件23中为中部驱动载体),所述第二载体232位于所述载体组件23的下部位置(即,所述第二载体232在所述载体组件23中为下部驱动载体),所述支撑件233位于所述载体组件23中的上部位置(即,所述支撑件233在所述载体组件23中为上部驱动载体),并且,在本技术实施例中,所述光学镜头10被固定于位于所述驱动组件的中部的所述第一载体231上,这样的位置和结构配置使得:所述光学镜头10与所述感光组
件30之间的距离得以缩减,因此,根据本技术的所述驱动装置20适用于后焦较小的光学镜头10。当然,这种配置方式也可以提高所述驱动装置20的组装精度。
85.更具体地,如图2至图6所示,所述支撑件233包括主支撑板2331和自所述主支撑板2331的转角区域往下延伸的至少一延伸腿2332,所述主支撑板2331被设置于所述第一载体231的上方且所述至少一延伸腿2332结合于所述第二载体232,例如,所述至少一延伸腿2332通过粘接的方式附着于所述第二载体232的外侧壁上。在本技术一个具体的示例中,所述支撑件233包括自所述主支撑板2331的四个转角区域以垂直于所述主支撑板2331所设定的平面的方向向下延伸的四条延伸腿2332,其中,当所述支撑件233以所述四条延伸腿2332卡合于或者粘附于所述第二载体232的外侧壁的方式结合于所述第二载体232,以在所述第二载体232和所述支撑件233形成用于收容所述第一载体231于其内的收容空间230。也就是,在本技术实施例中,所述支撑件233的尺寸略大于所述第二载体232的尺寸,以使得所述支撑件233能够被套接于所述第二载体232上。
86.特别地,在该具体示例中,所述支撑件233的所述四条延伸腿2332的位置设定避免其与所述第二载体232的拐角相触碰,从而能够避免其与所述第二载体232的连接卡扣不够紧密以及在连接处产生毛刺。
87.应可以理解,在根据本技术的所述驱动装置20中,在所述载体组件23中,所述支撑件233通过扣合或者粘接的方式被固定于所述第二载体232,并且,所述第一载体231可动地收容于所述支撑件233和所述第二载体232所形成的所述收容空间230内,通过这样的结构配置,所述第一载体231和所述第二载体232被组装在一起以具有一体结构。也就是,在进行光学防抖时,所述第一载体231能够在所述支撑件233和所述第二载体232形成的收容空间230内在垂直于所述光轴方向的平面内运动;在进行光学对焦时,所述第二载体232能够带动所述第一载体231沿着光轴方向运动。应可以理解,所述支撑件233位于所述第二载体232的上方,其还能够防止所述第二载体232在沿着光轴方向运动或受外力冲击时冲出所述收容空间230。
88.进一步地,为了允许所述第一载体231能够在所述第二载体232和所述支撑件233所形成的收容空间230内在垂直于光轴方向的平面内移动,在本技术实施例中,所述驱动装置20进一步包括设置在所述支撑件233与所述第一载体231之间的第一可动部234以及设置在所述第一载体231与所述第二载体232之间的第二可动部235,其中,所述第一可动部234被配置为提供所述第一载体231沿着所述第一方向和/或所述第二方向的运动,以及,所述第二可动部235被配置为提供沿着所述第一方向和/或所述第二方向的运动。
89.具体地,如图2至图6所示,在本技术实施例中,所述第一可动部234包括适于沿着所述第一方向和/或所述第二方向滚动的至少一滚珠,以通过所述至少一滚珠确保所述支撑件233和所述第一载体231之间保持一定的距离,且使得所述第一载体231在所述收容空间230内运动时具有相对较小的摩擦阻力(滚动摩擦具有相对较小的摩擦力)。应可以理解,如果直接将所述支撑件233扣合于所述第一载体231上而不在两者之间设置所述至少一滚珠,所述第一载体231在被移动时将与所述支撑件233产生面摩擦而具有相对更大的摩擦阻力。
90.如图2至图6所示,在本技术实施例中,在所述支撑件233与所述第一载体231之间还设有与所述第一可动部234相关联的第一容纳部236,其中,所述第一容纳部236包括用于
容纳所述至少一滚珠的收容槽,以通过所述第一容纳部236和所述第一可动部234之间的配合,确保所述支撑件233和所述第一载体231之间具有预设间隙并且允许所述第一载体231在垂直于光轴方向的平面内移动。
91.在本技术一个具体的示例中,所述第一载体231在其入光侧的上表面上设有所述收容槽,更明确地,在该示例中,所述第一载体231具有形成于其上表面的四个转角区域的4个所述收容槽。所述第一可动部234包括4个所述滚珠,4个所述滚珠分别被收容于4个所述收容槽内。应注意到,在本技术实施例中,所述支撑件233位于所述所述滚珠的上方,因此,其能够对所述第一可动部234进行限位以防止其冲出所述收容空间230。
92.进一步地,在本技术实施例中,所述第二可动部235包括适于沿着所述第一方向和/或所述第二方向滚动的至少一滚珠,以通过所述至少一滚珠确保所述第一载体231和所述第二载体232之间保持一定的距离,且使得所述第一载体231在所述收容空间230内运动时具有相对较小的摩擦阻力(滚动摩擦具有相对较小的摩擦力)。应可以理解,如果直接将所述第一载体231叠置于所述第二载体232上而不在两者之间设置所述至少一滚珠,所述第一载体231在被移动时将与所述第二载体232产生面摩擦而具有相对更大的摩擦阻力。
93.如图2至图6所示,在本技术实施例中,在所述第一载体231与所述第二载体232之间还设有与所述第二可动部235相关联的第二容纳部237,其中,所述第二容纳部237包括用于容纳所述至少一滚珠的收容槽,以通过所述第二容纳部237和所述第二可动部235之间的配合,确保所述第一载体231和所述第二载体232之间具有预设间隙并且允许所述第一载体231在所述收容空间230内在垂直于光轴方向的平面内移动。
94.在本技术一个具体的示例中,所述第一载体231在其出光侧的下表面上设有所述收容槽,更明确地,在该示例中,所述第一载体231具有形成于其下表面的四个转角区域的4个所述收容槽。所述第二可动部235包括4个所述滚珠,4个所述滚珠分别被收容于4个所述收容槽内。应注意到,在本技术实施例中,所述第二载体232位于所述所述滚珠的上方,因此,其能够对所述第二可动部235进行限位以防止其冲出所述收容空间230。
95.也就是,在本技术实施例中,为了利于所述第一载体231能够在所述第二载体232和所述支撑件233所形成的收容空间230内在垂直于光轴方向的平面内移动,在所述第一载体231的上下两侧分别设置所述第一可动部234和所述第二可动部235,以通过所述第一可动部234和所述第二可动部235确保所述第一载体231与所述支撑件233和所述第二载体232之间具有预设距离,也就是,通过所述第一可动部234和所述第二可动部235使得所述第一载体231被悬持地支持于所述第二载体232和所述支撑件233所形成的所述收容空间230内。同时,所述第一可动部234和所述第二可动部235还可以减小所述第一载体231在沿着垂直于所述光轴方向的平面内移动时与所述第二载体232和所述支撑件233之间的摩擦,以减小功耗。
96.进一步地,如图2至图6所示,为了允许所述第二载体232能够相对于所述框架22沿着光轴方向运动,在本技术实施例中,所述驱动装置20进一步在所述第二载体232与所述框架22之间设有第三可动部238,所述第三可动部238被配置为提供所述第二载体232相对于所述框架22沿着光轴方向的运动。
97.更具体地,如图2至图6所示,在本技术实施例中,所述第三可动部238包括设置于所述第二载体232和所述框架22之间适于沿着所述光轴方向滚动的至少一滚珠,以通过所
述至少一滚珠确保所述第二载体232和所述框架22之间具有预设距离且使得所述第二载体232相对于所述框架22运动时具有相对较小的摩擦阻力(滚动摩擦具有相对较小的摩擦力)。
98.如图2至图6所示,在本技术实施例中,在所述第二载体232与所述框架22之间还设有与所述第三可动部238相关联的第三容纳部239,其中,所述第三容纳部239包括用于容纳所述至少一滚珠的收容槽,以通过所述第三容纳部239和所述第三可动部238之间的配合,确保所述第二载体232和所述框架22之间具有预设距离并且允许所述第二载体232沿着所述光轴方向相对于所述框架22进行移动,从而带动所述第一载体231承载着所述光学镜头10沿着所述光轴方向移动,以进行光学对焦。
99.在本技术一个具体的示例中,所述第二载体232在其外侧壁上设有所述收容槽,更明确地,在该示例中,第二载体232在其相对的两个外侧壁上设有两个所述收容槽,两个所述收容槽相互相对设置。所述第三可动部238包括6个所述滚珠,3个所述滚珠收容于其中一个所述收容槽,另外3个所述滚珠被收容于另一个所述收容槽。
100.进一步地,如图2至图7所示,在本技术实施例中,所述驱动装置20进一步包括用于驱动所述第一载体231相对于所述第二载体232沿着垂直于所述光轴的第一方向以及垂直于所述光轴和所述第一方向两者的第二方向运动的所述第一驱动部24,以及,用于驱动所述第二载体232相对于所述框架22沿着光轴方向运动的第二驱动部24。
101.在本技术实施例中,所述第一驱动部24包括被设置于所述第一载体231的至少一第一磁体241和被设置面对所述至少一第一磁体241的至少一第一线圈242。如图2至图7所示,在本技术一个具体的示例中,所述第一驱动部24包括两个所述第一磁体241和两个所述第一线圈242,其中,两个所述第一磁体241被设置于所述第一载体231的外侧壁中的相邻两侧壁上,两个所述第一线圈242分别面对两个所述第一磁体241。在该示例中,一对所述第一磁体241和所述第一线圈242的设置方式使得在被导通后,其能够产生垂直于光轴方向的第一方向(即,x轴方向)的驱动力,以驱动所述第一载体231以带动所述光学镜头10从而实现在x轴方向上的光学防抖;另一对所述第一磁体241和所述第一线圈242的设置方式使得在被导通后,其能够产生垂直于光轴方向的第二方向(即,y轴方向)的驱动力,以驱动所述第一载体231以带动所述光学镜头10从而实现在y轴方向上的光学防抖。在该示例中,所述第一驱动部24还包括用于感知两个所述第一磁体241的位置的霍尔传感器。当然,还可以通过其他传感器来感测所述第一磁体241的位置,例如,陀螺仪、隧穿磁阻芯片、巨磁阻芯片、异向磁阻芯片等。
102.在本技术实施例中,所述第二驱动部24包括设置于所述第二载体232的至少一第二磁体251和被设置面对于所述至少一第二磁体251的至少一第二线圈252。如图2至图7所示,在本技术一个具体的示例中,所述第二驱动部24包括一个所述第二磁体252和一个所述第二线圈252,其中,所述第二磁体252被设置于所述第二载体232的外侧壁,所述第二线圈252面对于所述第二磁体252。在该示例中,当所述第二磁体252和所述第二线圈252被导通后,其能够产生沿着光轴方向(即,z轴方向)的驱动力,以驱动所述第二载体232从而带动所述第一载体231承载着所述光学镜头10沿着光轴方向移动以实现光学对焦。在该示例中,所述第二驱动部24还包括用于感知所述第二磁体252的位置的霍尔传感器。当然,还可以通过其他传感器来感测所述第二磁体252的位置,例如,陀螺仪、隧穿磁阻芯片、巨磁阻芯片、异
向磁阻芯片等。
103.在上述示例中,所述第一线圈242和所述第二线圈252可安装在所述驱动装置20的基板26上,所述基板26可固定或结合于所述框架22上,其中,所述基板26从其底部伸出引脚并电连接于所述感光组件30的线路板32,以藉由所述线路板32导通所述基板26。
104.值得一提的是,在本技术实施例中,所述光学镜头10被安装于位于所述载体组件23的中部位置的所述第一载体231上,从而在所述第一载体231被驱动以带动所述光学镜头10在垂直于光轴方向的平面内运动时,需要相对较小的驱动力,以减小功耗。并且,由于所述第一载体231被设置于所述第二载体232上或者被收容于所述第二载体232内,也就是,所述第一载体231在沿着光轴方向上的移动是由所述第二载体232在光轴方向上的移动产生的,因此,驱动所述第二载体232移动的驱动力应大于驱动所述第一载体231移动的驱动力,以实现在驱动所述第二载体232移动时,其驱动力足以带动所述第一载体231和所述光学镜头10移动。
105.进一步地,在本技术实施例中,所述外壳体21可以结合到所述框架22上,用于保护所述驱动装置20内的各个部件,同时,所述外壳体21还可以用于屏蔽所述摄像模组在工作期间产生的电磁波,即,所述外壳体21还可以具有电磁屏蔽功能。应可以理解,如果所述摄像模组工作时所产生的电磁波向外反射,则电磁波可能影响其他电子元器件,可能导致通信错误或者故障。为了具有电磁屏蔽功能,所述外壳体21的材料可以是金属材料,以通过其接地使得所述外壳体21形成电磁屏蔽罩;或者,当所述外壳体21有塑料材料制成时,可在其外表面涂覆导电材料,以阻挡电磁波。
106.进一步地,本技术发明人在跌落撞击等实验中发现,现有技术中的位置感测元件或者控制芯片容易碎裂,究其原因则是,现有技术中的位置感测元件和控制芯片通过一块厚度薄的基板26安装在外壳体21上,对位置感测元件和控制芯片的防撞击保护不够,在所述驱动装置20内对位置感测元件和控制芯片涂上保护胶可以有效减小碎裂风险。但是在所述驱动装置20内涂胶又会导致胶水污染或者影响所述驱动装置20的功能。因此本技术实施例中,设置一防撞结构,使得所述第一载体231和所述第二载体232在运动过程中不会对位置感测元件和控制芯片产生撞击。具体地,所述防撞结构可以被设置于所述框架22的内侧壁,并面对所述第二载体232,例如,在本技术一个具体示例中,所述防撞结构为一凸起结构,该防撞结构具有一定厚度,以使得磁铁与线圈之间存在一定距离,该距离范围为>80μm。
107.图8图示了根据本技术实施例的所述驱动装置20的第一变形实施中载体组件23的示意图。图9图示了根据本技术实施例的所述驱动装置20的该第一变形实施中所述载体组件23的立体示意图。如图8和图9所示,相较于如图2至图7所示意的实施例,在该第一变形实施中,所述第一容纳部236和所述第二容纳部237的形状和尺寸配置使得其具有导引所述所述第一可动部234和所述第二可动部235的运动的功能。也就是,在该第一变形实施中,所述第一容纳部236的形状、延伸方向和尺寸配置使得所述第三容纳部239被配置为引导所述第一载体231沿着所述第一方向和/或所述第二方向的运动。所述第二容纳部237的形状、延伸方向和尺寸配置使得所述第二容纳部237被配置为引导所述第一载体231沿着所述第一方向和/或所述第二方向的运动。
108.例如,如图8和图9所示,在该示例中,所述第一容纳部236包括设置于所述第一载
体231的上侧且沿着x轴方向延伸的收容槽,所述第二容纳部237包括设置于所述第一载体231的下侧且沿着y轴方向延伸的收容槽,以通过所述沿着x轴方向延伸的收容槽引导所述第一载体231沿着所述第一方向的运动和通过所述沿着y轴方向延伸的收容槽引导所述第二载体232沿着所述第二方向的运动。当然,在该第一变形实施例的其他具体示例中,还可以通过其他方式来配置所述第一容纳部236和所述第二收容部的延伸方式,例如,在所述第一载体231的上侧设置沿着y轴方向延伸的收容槽,以及,在设置于所述第一载体231的下侧且沿着x轴方向延伸的收容槽,如图10和图11所示,对此,并不为本技术所局限。
109.优选地,在如图8至图11所示意的变形实施例中,所述收容槽与所述滚珠的尺寸相对应,以通过尺寸的对应关系限制所述滚珠在所述收容槽内的运动特性。
110.图12图示了根据本技术实施例的所述驱动装置20的第三变形实施中载体组件23的示意图。图13图示了根据本技术实施例的所述驱动装置20的该第三变形实施中所述载体组件23和框架22之间的爆炸示意图。如图12和图13所示,相较于如图2至图7所示意的实施例,在该第三变形实施中,所述光学镜头10被固定于所述第二载体232,所述第二载体232被收容于所述第一载体231和所述支撑件233所形成的所述收容空间230内。也就是,在该第三变形实施例中,所述第一载体231与所述第二载体232之间的尺寸关系发生颠覆,所述第二载体232被收容于所述第一载体231或者被支持于所述第一载体231上。
111.应可以理解,在该第三变形实施中,通过将所述光学镜头10固定于所述第二载体232,可使得在驱动所述光学镜头10沿着光轴方向移动以进行自动对焦时,只需要驱动所述第二载体232以带动所述光学镜头10沿着所述光轴方向运动即可,而不需要带动所述第一载体231进行沿着光轴方向的运动,因此,在该第三变形实施中,使用相对较小的驱动力便能够实现光学对焦。
112.具体地,如图12和图13所示,在该第三变形实施中,所述驱动装置20包括外壳体21;被收容于所述外壳体21内的框架22;以及,被收容于所述框架22内的载体组件23,其中,所述载体组件23包括第二载体232、第一载体231和支撑件233,所述第二载体232被设置于所述第一载体231和所述支撑件233形成的收容空间230内,所述第二载体232被配置为安装镜头模块于其内。特别地,在该第三实施例中,所述载体组件23的第二载体232被配置能够相对于所述框架22沿着光轴方向运动;所述载体组件23的第一载体231被配置能够相对于所述第二载体232沿着垂直于所述光轴的第一方向以及垂直于所述光轴和所述第一方向两者的第二方向运动以带动所述第二载体232沿着所述第一方向和第二方向运动。
113.相应地,在该第三变形实施例中,在所述第一载体231和所述第二载体232之间设有第四可动部235a(例如,所述第四可动部235a被实施为至少一滚珠),以通过所述第四可动部235a确保所述第一载体231和所述第二载体232之间具有预设距离并且允许所述第二载体242相对于所述第一载体231沿着光轴方向进行移动,以进行光学对焦。并且,所述至少一滚珠能够降低所述第二载体232相对于所述第一载体231沿着所述光轴方向移动时的摩擦阻力,以降低功耗。相应地,还可以在所述第一载体231和所述第二载体232之间设有与所述第四可动部235a相关联的第四容纳部237a(例如,所述第四容纳部237a被实施为至少一收容槽)。
114.进一步地,在第三变形实施例中,在所述第一载体231和所述框架22之间还设有第五可动部234a,以通过所述第五可动部234a确保所述第一载体231与所述框架22之间具有
预设距离,其中,所述第五可动部234a可被实施为至少一滚珠,以通过所述至少一滚珠降低所述第一载体231在相对于所述框架22在沿着垂直于所述光轴的方向的平面内移动时的摩擦阻力。相应地,还可以在所述框架22和所述第一载体231之间设有与所述第五可动部234a相关联的第五容纳部236a(例如,所述第五容纳部236a被实施为至少一收容槽)。并且,还可以配置所述第五容纳部236a的形状、延伸方向和尺寸配置以使得所述第五容纳部236a能够导引所述第五可动部234a的运动特性。
115.图14图示了根据本技术实施例的所述驱动装置20的第四变形实施的示意图。相较于如图2至图7所示意的实施例,如图14所示,在该第四变形实中,所述驱动装置20还包括设置于所述第二载体232上且沿所述光轴方向面向所述第一载体231的至少一第一磁轭243,所述至少一第一磁轭243能够与设置于所述第一载体231的至少一第一磁体241相配合以提供拉回所述第一载体231的回动力。
116.具体地,在图14所示的示例中,所述至少一第一磁轭243包括被安装于所述第二载体232上的两个所述第一磁轭243,其中,两个所述第一磁轭243可以与至少以第一磁体241之间产生磁力,通过磁力将所述第一载体231分别沿朝向两个所述第一磁轭243的方向拉动。具体地,当所述第一线圈242被施加驱动信号进行通电后,所述第一线圈242与所述第一磁体241之间的电磁相互作用产生沿x轴和y轴方向的驱动力,因此所述第一载体231可以在驱动力的作用下沿x轴和y轴方向运动,当所述第一线圈242的驱动信号被停止后,所述第一载体231可通过所述第一磁体241和所述第一磁轭243之间的磁力而返回到初始位置,这里,初始位置是指所述第一载体231在所述第一线圈242施加驱动信号之前的位置。
117.进一步地,在该第四变形实施例中,所述驱动装置20进一步包括设置于所述框架22且沿所述光轴方向面向所述第二载体232的至少一第二磁轭253,所述至少一第二磁轭253能够与设置于所述第二载体232的至少一第二磁体252相配合以提供拉回所述第二载体232的回动力。
118.具体地,在如图14所示意的示例中,所述驱动装置20可以包括设置为沿光轴方向面对所述第二载体232的一个第二磁轭253,所述第二磁轭253被设置在所述框架22上,所述第三磁轭可以与所述第二载体232产生磁力,通过磁力将所述第二载体232沿朝向所述第二磁轭253的方向拉动。具体地,当所述第二线圈252被施加驱动信号进行通电后,所述第二线圈252与所述第二磁体252之间的电磁相互作用产生沿z轴方向的驱动力,因此所述第二载体232可以在驱动力的作用下沿z轴方向运动,当所述第二线圈252的驱动信号被停止后,所述第二载体232可通过所述第二磁体252和所述第二磁轭253之间的磁力而返回到初始位置。
119.图15图示了根据本技术实施例的所述驱动装置20的第五变形实施的示意图。与第四变形实施不同的是,在该第五变形实施中,所述驱动装置20通过弹性元件使得所述第一载体231和所述第二载体232回到初始位置。相应地,如图15所示,在第五变形实施例中,所述驱动装置20进一步包括设置于所述第一载体231和所述第二载体232之间的第一弹性元件244,以通过所述第一弹性元件244提供拉回所述第一载体231的回动力,以及,设置于所述第二载体232和所述框架22之间的第二弹性元件254,以通过所述第二弹性元件254提供拉回所述第二载体232的回动力。
120.具体地,所述第一载体231与所述第二载体232间设置至少一所述第一弹性元件
244,其中,所述第一弹性元件244的一端固定于所述第一载体231,其另一端固定于所述第二载体232,例如,在该第五变形实施例的一个具体示例中,可包括四个所述第一弹性元件244,其分别被设置于所述第一载体231和所述第二载体232的四个拐角处。当所述第一线圈242被施加驱动信号进行通电后,所述第一线圈242与所述第一磁体241之间的电磁相互作用产生沿x轴和y轴方向的驱动力,因此所述第一可以在驱动力的作用下沿x轴和y轴方向运动,当所述第一线圈242的驱动信号被停止后,所述第一载体231可以通过所述第一弹性元件244的弹力而返回到初始位置。
121.具体地,所述第二载体232与所述框架22间设置至少一所述第二弹性元件254,所述第二弹性元件254的一端被固定在所述第二载体232上,其另一端固定在所述框架22上,例如,在该第五变形实施例的一个具体示例中,可包括四个所述第二弹性元件254,其分别被设置于所述第二载体232和所述框架22的四个拐角处。其中,当第二线圈252被施加驱动信号进行通电后,所述第二线圈252与所述磁铁之间的电磁相互作用产生沿z轴方向的驱动力,因此所述第二载体232可以在驱动力的作用下沿z轴方向运动,当所述第二线圈252的驱动信号被停止后,所述第二载体232可通过所述第二弹性元件254的弹力而返回到初始位置。
122.值得一提的是,在该第五变形实施例中,所述第一弹性元件244和所述第二弹性元件254可以为悬丝、弹簧、弹片,本技术不做限制。本实施例中,弹性介质也可以设置在其他位置,能够实现ois载体和af载体的复位功能即可。
123.综上,基于本技术实施例的摄像模组及其驱动装置20被阐明,其中,所述驱动装置20能够通过较少数量的载体(即,现有技术中的框架22)来实现诸如光学防抖和光学对焦之类的光学性能调整功能。
124.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1