一种焊接机
1.本实用新型属于焊接机技术领域,涉及一种焊接机。
背景技术:
2.随着科技的不断发展,人们在工件上连接有零部件时通常采用的是焊接的方式,而人工焊接,会耗费较大的人力,并且对工作人员的要求较高,因此现有的常采用的是焊接机对工件进行加工。
3.如中国专利申请(专利申请号:201720990240.x)公开了一种可翻转的螺柱焊接夹具,包括支架、轴支承机构、翻转底座和夹紧机构,支架包括左框架、右框架、第一横杆、第二横杆、左框架和右框架为大小相等的矩形框架,轴支承机构设置为两个,其中一个轴支承机构设置在左框架的上表面,另一个轴支承机构设置在右框架的上表面,轴支承机构包括一个水平贯穿的轴孔,轴孔的轴线垂直于左框架所在平面,夹紧机构设置在翻转底座上,对放置在翻转底座上的工件进行夹紧,夹紧机构包括夹紧气缸、压紧臂、连接件、连接板和工件支撑块,夹紧气缸与连接板连接,并通过连接板固定在翻转底座的边缘。
4.上述结构虽然能通夹紧机构将工件夹紧,并通过翻转底座翻转,但是由于现有的工件在焊接时,有时需要在工件上焊接角件,如图1所示,现有的角件包括底板11,底板11上具有插孔111,底板11的边沿弯折形成定位翻边12,定位翻边12具有呈弧形的定位板121和两个具有倾斜面123的限位板122,两个限位板122位于定位板121两侧,限位板122与定位板121一体成型;因此在焊接过程中,角件的工件较大,会影响工件的翻转和焊接,因此采用常规的夹紧机构和翻转底座会碰撞到角件,导致工件的焊机困难,从而影响了焊接机的焊接稳定性。
技术实现要素:
5.本实用新型的目的是针对现有的技术存在上述问题,提出了一种焊接机,本实用新型所要解决的技术问题是:如何解决现有的焊接机的焊接不稳定的问题。
6.本实用新型的目的可通过下列技术方案来实现:
7.一种焊接机,包括送料机构、焊接机器人和能将工件夹紧的底座和能带动底座翻转的翻转机构,所述送料机构能将零件送至底座夹紧的工件上并通过焊接机器人将零件焊接在工件上,其特征在于,所述底座上连接有限位座,所述限位座上设有可供角件套设的限位销,所述底座上开设有可供角件部分嵌入的开口,所述开口朝向底座的外侧。
8.工作原理:先将工件放置在底座上,并将工件夹紧,在通过送料机构将零件移送至底座夹紧的工件上,此时焊接机器人再将零件焊接在工件上完成焊接,但是在本案工件加工时,还需要将角件焊接在工件上,因此需要在底座上设置有限位座,并在限位座上设有限位销,此时角件能通过插孔套设在限位销上,从而实现了对角件的定位,底座上还开设有开口,开口的设置,使得工件带动角件一起翻转更加的方便,并且也方便了焊接机器人的焊接,为焊接机器人的焊接提供一定的空间,从而进一步的提升了整个焊接机的稳定性。
9.在上述的焊接机中,所述底座上设有能带动限位销前后移动的推动气缸,所述限位座部分设置在开口的上方。
10.该结构的设置,使得角件套设在限位销上时,限位销可对角件进行限位,并提升了焊接机器人焊接的稳定性,而当工件加工完成后,可直接通过驱动推动气缸将限位销缩回限位座内,进一步的使得工件加工完成了的下料更加方便。
11.在上述的焊接机中,所述底座上设有若干个可供工件套设的限位柱和可供工件抵靠的抵靠柱,所述底座上还设有能将工件夹紧在抵靠柱上的夹紧机构。
12.限位柱的设置,能对工件进行初步定位,而抵靠柱能与夹紧机构配合,将工件稳定的定位在底座上,避免了工件在翻转或者是焊接的过程中发生位移,进一步的提升了焊接机焊接的稳定性。
13.在上述的焊接机中,所述夹紧机构包括夹紧气缸和夹紧臂,所述夹紧臂的一端与夹紧气缸的活塞杆铰接,所述夹紧气缸包括气缸壳,所述气缸壳上设有铰接座,所述铰接座上铰接有铰接臂,所述铰接臂的一端与夹紧臂的中部铰接,所述夹紧气缸带动夹紧臂转动后压紧在相应的抵靠柱上。
14.通过驱动夹紧气缸,夹紧气缸的活塞杆推动夹紧臂的一端向上移动,而由于夹紧臂的中部通过白东部铰接在气缸壳上,夹紧臂的另一端通过杠杆原理朝下移动并能将工件压紧在抵靠柱上,从而实现了对工件的定位,提升了焊接机的稳定性。
15.在上述的焊接机中,所述送料机构包括机械手、限位块、弹簧和与机械手连接的安装板,所述限位块通过弹簧与安装板连接,限位块上开设有可供角件的定位板嵌入的限位槽,所述限位槽上设有至少一个能将定位板吸紧的磁铁。
16.机械手控制安装板、弹簧和限位块一起移动至角件上方,且通过下移使得角件的定位板能部分或者全部位于限位槽内,在若角件的定位板全部位于限位槽内,可直接通过磁性件将角件吸紧并使角件位于限位槽内;若角件的定位板是部分位于限位槽内时,由于限位槽也是呈弧形,定位板也为弧形板,在限位块逐渐下压的过程中,由于角件的定位板与限位槽的槽壁之间相互抵靠,导致了限位块会受到定位板的导向力具有倾斜的趋势,弹簧能带动限位块倾斜并使得定位板能全部嵌入限位槽内,通过磁性件将角件吸紧,进一步的提升了角件上料的稳定性,也进一步的提升了焊接机焊接的稳定性。
17.在上述的焊接机中,所述安装板上连接有辅助限位板,所述辅助限位板位于限位块的正后方,所述辅助限位板与限位块之间具有间隙。
18.由于限位块和角件的限位板的设置,使得角件在嵌入限位槽的过程中,会出现角件会带动限位块朝向辅助限位板的一端运动,而辅助限位板对限位块有限制作用,避免限位块一直朝向辅助限位块这端运动使角件无法嵌入到限位槽内,从而使得角件能更稳定的设置在限位槽内,进一步的提升了焊接机焊接的稳定性。
19.在上述的焊接机中,所述辅助限位板和限位块上均开设有可供限位销穿设的通孔。
20.通孔的设置,方便角件快速套设在限位销上,使得角件和限位销的套接更加的稳定,从而能进一步的提升角件的稳定性。
21.在上述的焊接机中,本焊接机包括机架,所述送料机构还包括可供零件振动并移出的振动盘和与振动盘的出口连接的上料管道,所述振动盘和上料管道均设置在机架上,
所述上料管道内设有可供零件滑动的上料槽,所述机架上还设有上料气缸,所述上料气缸的活塞杆上连接有能将上料槽内的零件夹取的气动手指夹头或电磁铁。
22.零件通过振动盘振动并从振动盘的出口移出至上料管道的上料槽内,并在上料槽内滑动,此时上料气缸的活塞杆能带动气动手指夹头将零件夹取至底板的工件上或者是通过电磁铁将零件吸取至底板的工件上,上述结构使得送料的过程更加的简单和稳定,进一步的提升了焊接机的工作效率和稳定性。
23.在上述的焊接机中,所述上料管道包括遮挡板,所述遮挡板能将上料槽的槽口部分遮挡,所述上料管道靠近底座的一端具有让位台阶,所述气动手指夹头能嵌入让位台阶内。
24.通过遮挡板的设置,避免了零件在让位槽滑动时从让位槽的槽口滑出,进一步的提升了上料的稳定性;而让位台阶的设置,使得气动手指夹头能稳定和方便的将零件夹取,进一步的提升了焊接机的送料效率和送料稳定性。
25.在上述的焊接机中,所述翻转机构包括设置在机架上的翻转电机和两个支撑座,两个支撑座分别设置在底座的两端,所述支撑座上均设有转轴,所述转轴均与底座连接,其中一个支撑座的转轴与翻转电机的电机轴固连。
26.支撑座的设置,使得底座的设置更加的稳定,且采用翻转电机带动底座转动,使得底座的转动更加的稳定,进一步的提升了焊接机的稳定性。
27.与现有技术相比,本焊接机具有的优点:在底座上开设有开口,使得工件带动角件一起翻转更加的方便,并且也方便了焊接机器人的焊接,为焊接机器人的焊接提供一定的空间,从而进一步的提升了整个焊接机的稳定性。
附图说明
28.图1是本焊接机所要焊接的角件的结构示意图。
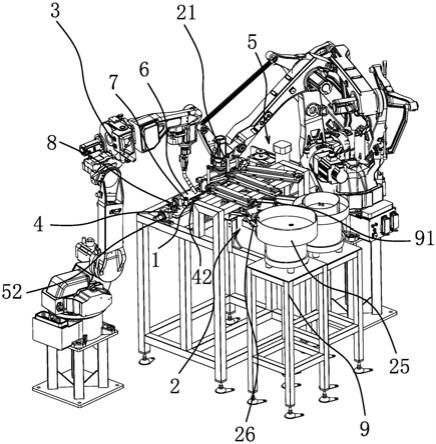
29.图2是本焊接机的结构示意图。
30.图3是本焊接机与角件装配后的部分结构示意图。
31.图4是本焊接机的部分结构示意图。
32.图5是图4中a处的局部放大图。
33.图6是本焊接机中送料机构的部分结构示意图。
34.图中,1、角件;11、底板;111、插孔;12、定位翻边;121、定位板;122、限位板;123、倾斜面;2、送料机构;21、机械手;22、限位块;221、限位槽;23、弹簧;24、安装板;241、辅助限位板;242、间隙;243、通孔;25、振动盘;26、上料管道;261、上料槽;262、遮挡板;263、让位台阶;3、焊接机器人;4、底座;41、限位座;411、限位销;42、开口;43、推动气缸;44、限位柱;45、抵靠柱;5、翻转机构;51、翻转电机;52、支撑座;521、转轴;6、工件;7、零件;8、夹紧机构;81、夹紧气缸;811、气缸壳;82、夹紧臂;83、铰接座;84、铰接臂;9、机架;91、上料气缸;911、气动手指夹头;912、电磁铁。
具体实施方式
35.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
36.如图1所示,本焊接机,包括送料机构2、焊接机器人3和能将工件6夹紧的底座4和能带动底座4翻转的翻转机构5,送料机构2能将零件7送至底座4夹紧的工件6上并通过焊接机器人3将零件7焊接在工件6上。
37.具体的说,如图1
‑
6所示,底座4上连接有限位座41,限位座41上设有可供角件1套设的限位销411,底座4上开设有可供角件1部分嵌入的开口42,开口42朝向底座4的外侧。
38.工作原理:先将工件6放置在底座4上,并将工件6夹紧,在通过送料机构2将零件7移送至底座4夹紧的工件6上,此时焊接机器人3再将零件7焊接在工件6上完成焊接,但是在本案工件6加工时,还需要将角件1焊接在工件6上,因此需要在底座4上设置有限位座41,并在限位座41上设有限位销411,此时角件1能通过插孔111套设在限位销411上,从而实现了对角件1的定位,底座4上还开设有开口42,开口42的设置,使得工件6带动角件1一起翻转更加的方便,并且也方便了焊接机器人3的焊接,为焊接机器人3的焊接提供一定的空间,从而进一步的提升了整个焊接机的稳定性。
39.如图2
‑
4所示,底座4上设有能带动限位销411前后移动的推动气缸43,限位座41部分设置在开口42的上方,底座4上设有若干个可供工件6套设的限位柱44和可供工件6抵靠的抵靠柱45,底座4上还设有能将工件6夹紧在抵靠柱45上的夹紧机构8。
40.如图4所示,夹紧机构8包括夹紧气缸81和夹紧臂82,夹紧臂82的一端与夹紧气缸81的活塞杆铰接,夹紧气缸81包括气缸壳811,气缸壳811上设有铰接座83,铰接座83上铰接有摆动臂,摆动臂的一端与夹紧臂82的中部铰接,夹紧气缸81带动夹紧臂82转动后压紧在相应的抵靠柱45上。
41.如图2和图3所示,送料机构2包括机械手21、限位块22、弹簧23和与机械手21连接的安装板24,限位块22通过弹簧23与安装板24连接,限位块22上开设有可供角件1的定位板121嵌入的限位槽221,限位槽221上设有至少一个能将定位板121吸紧的磁铁,安装板24上连接有辅助限位板241,辅助限位板241位于限位块22的正后方,辅助限位板241与限位块22之间具有间隙242,辅助限位板241和限位块22上均开设有可供限位销411穿设的通孔243。
42.如图4所示,翻转机构5包括设置在机架9上的翻转电机51和两个支撑座52,两个支撑座52分别设置在底座4的两端,支撑座52上均设有转轴521,转轴521均与底座4连接,其中一个支撑座52的转轴521与翻转电机51的电机轴固连。
43.如图4
‑
6所示,本焊接机包括机架9,送料机构2还包括可供零件7振动并移出的振动盘25和与振动盘25的出口连接的上料管道26,振动盘25和上料管道26均设置在机架9上,上料管道26内设有可供零件7滑动的上料槽261,机架9上还设有上料气缸91,上料气缸91的活塞杆上连接有能将上料槽261内的零件7夹取的气动手指夹头911或电磁铁912,上料管道26包括遮挡板262,遮挡板262能将上料槽261的槽口部分遮挡,上料管道26靠近底座4的一端具有让位台阶263,气动手指夹头911能嵌入让位台阶263内。
44.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1