磁悬浮平面马达的应用结构的制作方法
1.本实用新型涉及驱动装置领域技术,尤其是指一种磁悬浮平面马达的应用结构。
背景技术:
2.现代精密、超精密加工装备对高响应、高速度、高精度的平面驱动装置有着迫切的需求,如机械加工、电子产品生产、机械装卸、制造自动化仪表设备甚至机器人驱动等。
3.现有的平面驱动装置通常由旋转式电动机产生动力驱动,再由皮带、滚珠丝杆等机械装置,转换为直线运动。由于机械装置复杂,传动精度和速度都受到限制,故现有的平面驱动装置存在响应速度慢,定位精度低的缺点。因此,有必要对现有的平面驱动装置进行改进。
技术实现要素:
4.有鉴于此,本实用新型针对现有技术存在之缺失,其主要目的是提供一种磁悬浮平面马达的应用结构,其能有效解决现有之平面驱动装置响应速度慢,定位精度低的问题。
5.为实现上述目的,本实用新型采用如下之技术方案:
6.一种磁悬浮平面马达的应用结构,包括有机架、磁悬浮平面马达、运动载具、放置载具以及机械手;该机架上具有工作台;该磁悬浮平面马达包括有定子和动子,该定子设置于工作台上,该动子设置于定子上;该运动载具固定在动子上,该放置载具设置于工作台上并位于运动载具的侧旁;该机械手设置于工作台上并位于运动载具和放置载具的侧旁。
7.一种磁悬浮平面马达的应用结构,包括有机架、两磁悬浮平面马达、两运动载具以及两相机;该机架上具有工作台;该两磁悬浮平面马达均包括有定子和动子,该定子设置于工作台上,该动子设置于定子上;该两运动载具固定在对应的动子上;该两相机设置于机架上并位于对应运动载具的上方。
8.作为一种优选方案,所述工作台上设置有两支架,该两相机分别固定在对应的支架上。
9.一种磁悬浮平面马达的应用结构,包括有机架、磁悬浮平面马达、运动载具以及激光器;该机架上具有工作台;该磁悬浮平面马达包括有定子和动子,该定子设置于工作台上,该动子设置于定子上;该运动载具固定在动子上;该激光器设置于工作台上并位于运动载具的上方。
10.一种磁悬浮平面马达的应用结构,包括有机架、两磁悬浮平面马达、两运动载具、一位置检测激光头和一线扫激光头;该机架上具有工作台;该两磁悬浮平面马达均包括有定子和动子,该定子设置于工作台上,该动子设置于定子上;该两运动载具固定在对应的动子上;该位置检测激光头和线扫激光头设置于机架上并位于对应运动载具的上方。
11.本实用新型与现有技术相比具有明显的优点和有益效果,具体而言,由上述技术方案可知:
12.通过选用磁悬浮平面马达作为驱动装置,且磁悬浮平面马达具有响应速度快,定
位精度高的特点,提高了设备的响应速度和定位精度,从而提高设备的加工效率。
13.为更清楚地阐述本实用新型的结构特征和功效,下面结合附图与具体实施例来对本实用新型进行详细说明。
附图说明
14.图1是磁悬浮平面马达的组装立体示意图;
15.图2是本实用新型之第一较佳实施例的组装立体示意图;
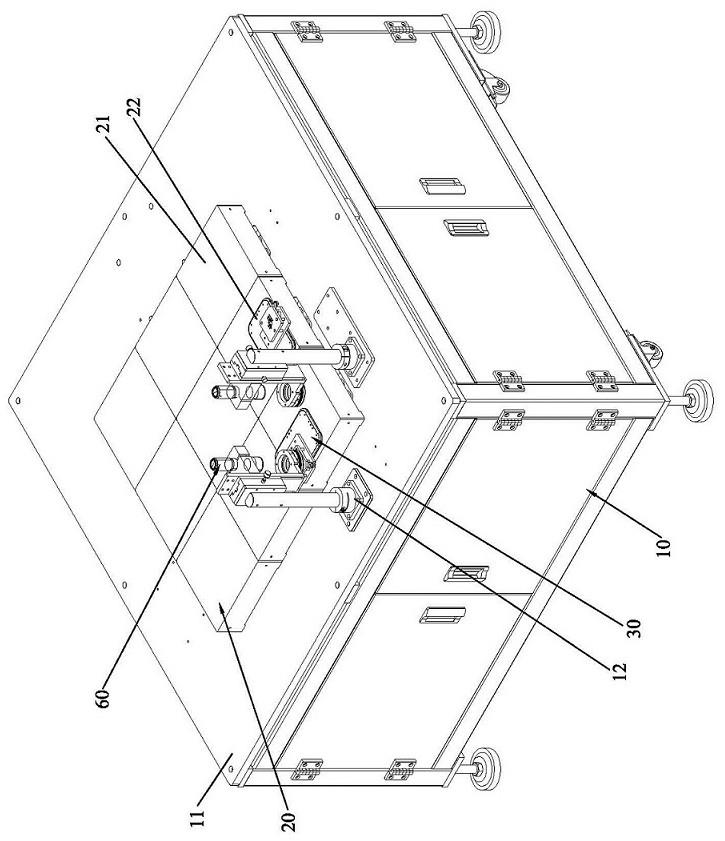
16.图3是本实用新型之第二较佳实施例的组装立体示意图;
17.图4是本实用新型之第三较佳实施例的组装立体示意图;
18.图5是本实用新型之第四较佳实施例的组装立体示意图。
19.附图标识说明:
20.10、机架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11、工作台
21.12、支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20、磁悬浮平面马达
22.21、定子
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22、动子
23.30、运动载具
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40、放置载具
24.50、机械手
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
60、相机
25.70、激光器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
80、位置检测激光头
26.90、线扫激光头。
具体实施方式
27.请参照图2所示,其显示出了本实用新型之第一较佳实施例的具体结构,包括有机架10、磁悬浮平面马达20、运动载具30、放置载具40以及机械手50。
28.该机架10上具有工作台11;该磁悬浮平面马达20包括有定子21和动子22,该定子21设置于工作台上11,该动子22设置于定子21上;该运动载具30固定在动子22上,该放置载具40设置于工作台11上并位于运动载具30的侧旁;该机械手50设置于工作台11上并位于运动载具30和放置载具40的侧旁。
29.详述本实施例的工作原理如下:
30.上料时,动子22带着运动载具30撞击放置载具40,同时,运动载具30打开,然后,机械手50运动到放置载具40取料,再将物料放置到运动载具30上,完成上料过程;下料时,动子22带着运动载具30撞击放置载具40,同时,运动载具30打开,然后机械手50运动到运动载具30取料,再将物料放置到放置载具40上,完成下料过程。
31.请参照图3所示,其显示出了本实用新型之第二较佳实施例的具体结构,包括有机架10、两磁悬浮平面马达20、两运动载具30以及两相机60。
32.该机架10上具有工作台11;该两磁悬浮平面马达20均包括有定子21和动子22,该定子21设置于工作台11上,该动子22设置于定子21上;该两运动载具30固定在对应的动子22上;该两相机60设置于机架10上并位于对应运动载具30的上方。在本实施例中,该工作台11上设置有两支架12,该两相机60分别固定在对应的支架12上。
33.详述本实施例的工作原理如下:
34.首先,将物料放入相应的运动载具30中,动子22带着运动载具30运动至相应的相
机60下方,接着,相机60对运动载具30进行定位并对产品的位置精度进行补偿,然后运动载具30运动至另一相机60的下方,另一相机60亦对运动载具30进行定位并对产品的位置精度进行补偿,从而得出动子22的运动精度。
35.请参照图4所示,其显示出了本实用新型之第三较佳实施例的具体结构,包括有机架10、磁悬浮平面马达20、运动载具30以及激光器70。
36.该机架10上具有工作台11;该磁悬浮平面马达20包括有定子21和动子22,该定子21设置于工作台11上,该动子22设置于定子21上;该运动载具30固定在动子22上;该激光器70设置于工作台11上并位于运动载具30的上方。
37.详述本实施例的工作原理如下:
38.首先,将待焊接样品放置于运动载具30中,接着,动子22带着运动载具30运动至激光器70的下方,然后,激光器70开始对待焊接样品进行焊接。
39.请参照图5所示,其显示出了本实用新型之第四较佳实施例的具体结构,包括有机架10、两磁悬浮平面马达20、两运动载具30、一位置检测激光头80和一线扫激光头90。
40.该机架10上具有工作台11;该两磁悬浮平面马达20均包括有定子21和动子22,该定子21设置于工作台11上,该动子22设置于定子21上;该两运动载具30固定在对应的动子22上;该位置检测激光头80和线扫激光头90设置于机架10上并位于对应运动载具30的上方。
41.详述本实施例的工作原理如下:
42.首先,将产品放置于相应的运动载具30中,动子22带着运动载具30运动至位置检测激光头80和线扫激光头90的下方,位置检测激光头80和线扫激光头90分别对产品进行位置检测和平面度检测。
43.本实用新型的设计重点在于:
44.通过选用磁悬浮平面马达作为驱动装置,且磁悬浮平面马达具有响应速度快,定位精度高的特点,提高了设备的响应速度和定位精度,从而提高设备的加工效率。
45.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型的技术范围作任何限制,故凡是依据本实用新型的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1