多关节悬臂拧紧设备的制作方法
1.本技术涉及拧紧设备技术领域,尤其涉及一种多关节悬臂拧紧设备。
背景技术:
2.在机械制造行业中,随着社会的发展,现有技术中的拧紧机构已经逐步取代人工拧紧装配等流程,相较于人工旋拧,易于处理较大型设备的装配及拧紧,省力且高效,但是常规的拧紧设备不能满足一些特殊的情况,如深孔的拧紧,更具体的,如td系列、tf系列、tg系列左右最终传动以及后桥壳体结合螺栓旋拧等情况,即现有技术中缺少一种适于深孔拧紧的拧紧设备。
技术实现要素:
3.有鉴于此,本技术提出了一种多关节悬臂拧紧设备,包括安装梁、机械臂、拧紧组件及延长轴;所述安装梁纵向设置;所述机械臂的前端设置在所述安装梁上,且所述机械臂至少为双关节机械臂;所述拧紧组件与所述机械臂的末端转轴连接,所述拧紧组件的前端为输出端,后端为操纵端;所述延长轴与所述拧紧组件的前端相轴接;所述拧紧组件的操纵端能够驱动所述机械臂在横向与纵向的预设范围内移动所述拧紧组件及所述延长轴。
4.在一种可能的实现方式中,还包括连接杆;所述拧紧组件位于所述机械臂的末端下方,所述拧紧组件与所述机械臂的末端通过所述连接杆转轴连接;所述连接杆上具有让位结构,用以让位,所述让位结构在所述连接杆靠近所述拧紧组件的一侧设置。
5.在一种可能的实现方式中,所述让位结构的弯折方向与所述延长轴的延长方向反向设置。
6.在一种可能的实现方式中,所述拧紧组件包括旋拧轴、固定支架及气弹簧;所述固定支架呈柱体结构,内部中空;所述旋拧轴安装在所述固定支架内部,所述旋拧轴的两端分别安装在所述固定支架上,且所述旋拧轴的前端与所述延长轴相轴接。
7.在一种可能的实现方式中,所述延长轴的轴向长度大于所述拧紧组件的轴向长度的一半。
8.在一种可能的实现方式中,所述拧紧组件的操纵端设置有手柄,所述手柄分别与所述拧紧组件、所述机械臂电连接。
9.在一种可能的实现方式中,所述安装梁上设置有托放座,呈柱体结构,顶部为平面,且所述托放座与所述机械臂在所述安装梁的同侧设置。
10.在一种可能的实现方式中,所述机械臂为三关节机械臂,包括主臂、升降臂及小臂;包括主臂的首端与所述安装梁转动连接,末端与所述升降臂转轴连接;所述升降臂上具有纵向调节杆;所述旋转臂的末端与所述小臂转动连接;所述小臂与所述拧紧组件通过所述连接杆转轴连接。
11.在一种可能的实现方式中,所述升降臂为气弹簧升降臂。
12.在一种可能的实现方式中,还包括控制柜及显示器;所述控制柜设置在所述安装
立柱上,位置位于所述机械臂的对侧,且所述控制柜内设置有控制单元,分别与所述拧紧组件、所述机械臂及所述显示器电连接;所述显示器设置在所述安装立柱上,位置位于所述机械臂的对侧,且所述显示器设置在所述控制柜的上方。
13.在一种可能的实现方式中,还包括遥控器;所述遥控器与所述控制柜电连接,且所述遥控器设置在所述机械臂上,所述遥控器的设置位置靠近所述拧紧组件。
14.本技术的有益效果:通过在拧紧组件的输出端加装延长轴,以使该拧紧设备能够处理深孔拧紧的使用环境,合理增加了拧紧设备的适用范围,并且更易于本领域实施人员装配,不仅如此,在拧紧组件与机械臂的末端加装连接杆,连接杆上让位结构的设计能够保证在拧紧设备旋拧深孔时有效避让,避免工件上一些特殊结构与拧紧设备相干涉的情况,进一步提高拧紧设备的适用范围。
15.根据下面参考附图对示例性实施例的详细说明,本技术的其它特征及方面将变得清楚。
附图说明
16.包含在说明书中并且构成说明书的一部分的附图与说明书一起示出了本技术的示例性实施例、特征和方面,并且用于解释本技术的原理。
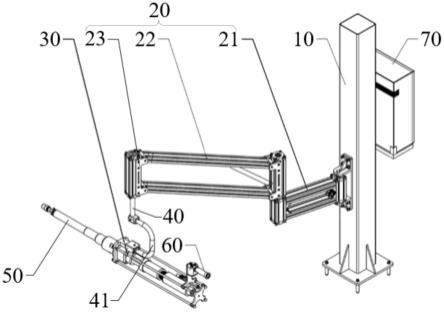
17.图1示出本技术实施例的多关节悬臂拧紧设备的立体结构图。
具体实施方式
18.以下将参考附图详细说明本技术的各种示例性实施例、特征和方面。附图中相同的附图标记表示功能相同或相似的元件。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
19.其中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术或简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
20.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
21.在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。
22.另外,为了更好的说明本技术,在下文的具体实施方式中给出了众多的具体细节。本领域技术人员应当理解,没有某些具体细节,本技术同样可以实施。在一些实例中,对于本领域技术人员熟知的方法、手段、元件和电路未作详细描述,以便于凸显本技术的主旨。
23.如图1所示,该多关节悬臂拧紧设备包括:安装梁10、机械臂20、拧紧组件30及延长轴50,安装梁10纵向设置,机械臂20的前端设置在安装梁10上,且机械臂20至少为双关节机械臂20,拧紧组件30与机械臂20的末端转轴连接,拧紧组件30的前端为输出端,后端为操纵
端,延长轴50与拧紧组件30的前端相轴接,拧紧组件30的操纵端能够驱动机械臂20在横向与纵向的预设范围内移动拧紧组件30及延长轴50。
24.在此实施例中,通过在拧紧组件30的输出端加装延长轴50,以使该拧紧设备能够处理深孔拧紧的使用环境,合理增加了拧紧设备的适用范围,并且更易于本领域实施人员装配,不仅如此,在拧紧组件30与机械臂20的末端加装连接杆40,连接杆40上让位结构41的设计能够保证在拧紧设备旋拧深孔时有效避让,避免工件上一些特殊结构与拧紧设备相干涉的情况,进一步提高拧紧设备的适用范围。
25.更具体的,机械臂20的预设移动范围包括水平方向与竖直方向,优选的,水平方向的最大覆盖范围为1100mm,竖直方向的覆盖范围为700mm。
26.还需要特别强调的是,该多关节悬臂拧紧设备主要用于工件深孔位置处的螺栓拧紧,通常为桥壳螺栓的拧紧。
27.在其中一个具体实施例中,还包括连接杆40及气弹簧,拧紧组件30位于机械臂20的末端下方,拧紧组件30与机械臂20的末端通过连接杆40转轴连接;连接杆40上具有让位结构41,让位结构41在连接杆40靠近拧紧组件30的一侧设置,增设气弹簧能够平衡机械臂重力,人员操作更省力。
28.在此实施例中,让位结构41的设置位置靠近连接杆40在拧紧组件30的一端,在处理工件上深孔的旋拧时尽可能的做到避让,避免相互干渉影响工作效率。
29.优选的,在拧紧组件30水平放置时,让位结构41在竖直方向的投影长度大于连接杆40其余部分长度的三分之一,确保本领域实施人员操纵设备时能够充分避让工件进行旋拧。
30.在其中一个具体实施例中,让位结构41的弯折方向与延长轴50的延长方向反向设置。
31.在此实施例中,让位结构41的具体结构并未做出限定,本领域实施人员只需确保设备不与工件发生干涉即可,故在本文中不做赘述。
32.优选的,让位结构41在连接杆40上呈“匚”型,且让位结构41的弯折方向与延长轴50的延长方向反向,即让位结构41的向拧紧设备的后端弯折。
33.在其中一个具体实施例中,拧紧组件30包括旋拧轴及固定支架,固定支架呈柱体结构,内部中空,旋拧轴安装在固定支架内部,旋拧轴的两端分别安装在固定支架上,且旋拧轴的前端与延长轴50相轴接,且旋拧轴上设置有用于助力的气弹簧结构。
34.在其中一个具体实施例中,优选的,延长轴50的轴向长度大于拧紧组件30的轴向长度的一半。
35.在此实施例中,拧紧组件30的前端通常为套筒,延长轴50与拧紧轴轴接,具体结构不做限定,只需确保延长轴50能够与拧紧轴一同旋拧即可,延长轴50的轴向长度通常在拧紧组件30轴向长度的0.5倍-3倍之间。
36.在其中一个具体实施例中,拧紧组件30的操纵端设置有手持部60,本领域实施人员可通过手持部60将拧紧机构定位到工件具体需要旋拧螺栓的位置,实现半自动化拧紧设备的操纵。
37.在其中一个具体实施例中,安装梁10上设置有托放座,呈柱体结构,顶部为平面,且托放座与机械臂20在安装梁10的同侧设置。
38.在其中一个具体实施例中,机械臂20为三关节机械臂20,包括主臂21、升降臂22及小臂23,包括主臂21的首端与安装梁10转动连接,末端与升降臂22转轴连接,升降臂22上具有纵向调节杆,旋转臂的末端与小臂23转动连接,小臂23与拧紧组件30通过连接杆40转轴连接。
39.在其中一个具体实施例中,升降臂22上的纵向调节杆为气弹簧。
40.在其中一个具体实施例中,还包括控制柜及显示器70,控制柜设置在安装立柱上,位置位于机械臂20的对侧,且控制柜内设置有控制单元,分别与拧紧组件30、机械臂20及显示器70电连接,显示器70设置在安装立柱上,位置位于机械臂20的对侧,且显示器70设置在控制柜的上方。
41.在其中一个具体实施例中,还包括遥控器,遥控器与控制柜电连接,且遥控器设置在机械臂20上,遥控器的设置位置靠近拧紧组件30。
42.在此实施例中,机械臂20的升降臂22一段靠近拧紧组件30的一侧安装遥控开关,便于本领域实施人员无需离开拧紧组件的操纵端就可以控制拧紧组件的启停。
43.需要强调的是,本技术的多关节悬臂拧紧设备仅对硬件设备进行改动,并未对旋拧设备的控制系统做出任何改动,只需调试设备以提高其适用范围即可,故控制单元的具体控制流程在本文中不做赘述。
44.以上已经描述了本技术的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术的改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1