一种可移动背驮式大直径航天产品自动对接平台和对接方法与流程
1.本发明涉及机械领域,具体涉及到航天先进装配制造技术领域中的一种可移动背驮式大直径航天产品自动对接平台和对接方法。
背景技术:
2.目前我国航天产品装配对接仍以离散型制造模式为主,而大直径航天产品具有结构复杂、零部结构件种类繁多等特点,离散型制造模式已经不能满足生产需求。现有常用的对接方式主要有三种:一是机械式手动对接,通过手工操作普通对接架车方式,经人眼观察、手摇、推拉机械式调节机构完成产品的对接,这种装配方式人员劳动强度大、装配效率低,且过于依赖操作人员经验,且人员太多不符合危险作业场所的安全要求。二是采用激光跟踪仪,在装配对接过程中实时监测对接产品的姿态,通过激光跟踪仪反馈的信息,经控制系统控制在轨的调姿对接设备实现自动装配对接,但每次装配对接前都需要将数台(至少3台)激光跟踪仪联合建站、标定坐标,准备时间较长;设备投入较大,且对非专业测量人员的装配操作人员来说,素质要求较高。三是采用将调姿机构与agv或rgv相结合的方式,并配置视觉测量系统,通过调度系统控制产品的对接,该方式对设备集成要求较高,控制系统复杂,视觉测量系统应用于该类航天产品需贴靶标上工装等操作,且运算和响应速度还不够成熟,造成装配对接效率并不能提高;需要配置的视觉测量系统和agv、rgv数量较多,成本昂贵。
技术实现要素:
3.本发明的目的是在现有技术的基础上,设计一种具有自动减震调平功能的对接平台,并在平台上设计有能够控制调整的位姿调节系统,从而解决现有技术中的效率低、对接精度低下的问题。
4.为了实现上述目的,本发明采用如下技术方案:一种可移动背驮式大直径航天产品自动对接平台,包括背驮式平台和位姿调节系统,所述背驮式平台包括床身、连接在床身上的若干个万向支撑机构和设置在床身上的移动平台,所述移动平台能够沿着床身直线移动,所述位姿调节系统设置在移动平台上,所述位姿调节系统至少包括一组三自由度调姿系统,所述每个万向支撑机构与床身之间设置有减震调平机构,在床身与地面之间具有支撑空间,移动小车能够进出支撑空间。
5.在上述技术方案中,所述床身内设置有直线导轨,所述移动平台设置在直线导轨上,沿着直线导轨移动。
6.在上述技术方案中,所述三自由度调姿系统包括:固定设置在移动平台上的垂直导轨安装座,垂直导轨安装座上设置有垂直直线导轨,通过升降机连接在垂直直线导轨上的升降台,升降台上设置有水平直线导轨,
通过丝杠组件连接在水平直线导轨上的横移安装座,所述横移安装座上具有弧形导轨道,所述弧形导轨上连接有滚转托架。
7.在上述技术方案中,所述垂直直线导轨、水平直线导轨、弧形导轨上各自设置有独立驱动的电机。
8.在上述技术方案中,一组三自由度调姿系统至少包括两个垂直导轨安装座,升降台的两端各自连接一个垂直导轨安装座,两个垂直导轨安装座上的电机同步驱动升降台的升降。
9.在上述技术方案中,所述弧形导轨上包括至少两个滚转托架,两个滚转托架上的电机驱动滚轮带动滚转托架滚转。
10.在上述技术方案中,包括至少一组两自由度调姿系统,所述两自由度调姿系统包括:固定设置在移动平台上的垂直导轨安装座,垂直导轨安装座上设置有垂直直线导轨,通过升降机连接在垂直直线导轨上的升降台,升降台上设置有水平直线导轨,通过丝杠组件连接在水平直线导轨上的横移安装座,在上述技术方案中,包括依次设置在移动平台上的两组三自由度调姿系统和一组两自由度调姿系统。
11.在上述技术方案中,对接平台的对接方法包括以下步骤:s1:将对接平台放置于准备工位,在移动平台上接受需要完成的对接部件;s2:控制移动小车进入到对接平台下方的支撑空间内,通过控制移动小车实现对接平台的背驮,并按照预先设计的路线,将对接平台移动至需要完成对接的位置后,移动小车离开;s3:在s2中移动小车离开后,减震调平机构和万向支撑机构自适应地面,实现对接平台的水平度达到0.05mm;s4:以基准点为参照,手动控制对接平台上的两组三自由度调姿系统,进行垂直方向的位置调节,进行对接部件的俯仰轴姿态调整;s5:在s4的基础上,手动控制两组三自由度调姿系统进行水平方向的位置调节,进行对接部件的偏转轴姿态调整;s6:在s5的基础上,手动控制两组三自由度调姿系统,使得对接部件沿着轴线进行滚转轴姿态调整;s7:待对接部件的滚转、偏航、俯仰轴与基准点分别对齐后,控制电机使得移动平台沿着直线导轨移动,从而实现两个对接部件的对接。
12.在上述技术方案中,所述减震调平机构包括楔块调平机构、弹簧和滑块,所述弹簧垂直设置在楔块调平机构于滑块之间。
13.综上所述,由于采用了上述技术方案,本发明的有益效果是:1)本发明采用可移动背驮式大直径航天产品自动对接平台,减少了整条脉动式生产线的潜伏式agv投入数量,并且可不经过吊装即可根据脉动式生产线总体布局移动平台位置,大幅提升了产品转运效率,增加了生产线运行的灵活性,减少了经济投入;2)本发明实现了大直径航天产品装配对接的自动化程度,经人工控制伺服电机精
确运动,即可实现航天产品的快速姿态调整和对接,无需人工操作机械传动机构,减轻了操作人员劳动强度,方便了人员操作,提升了装配对接效率,整体上提高了装配过程的自动化水平。
14.3)本发明在装配对接过程中,通过配合潜伏式agv实现产品的自动或半自动转运,仅需2人即可实现产品对接,减少了工位人员配置数量,为有效控制10人以上危险作业场所安全风险提供助力。
附图说明
15.本发明将通过例子并参照附图的方式说明,其中:图1是背驮式平台的结构示意图;图2是三自由度调姿系统的结构示意图;图3是两自由度调姿系统的结构示意图;图4是本实施例的整体结构示意图。
具体实施方式
16.本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
17.本说明书(包括任何附加权利要求、摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
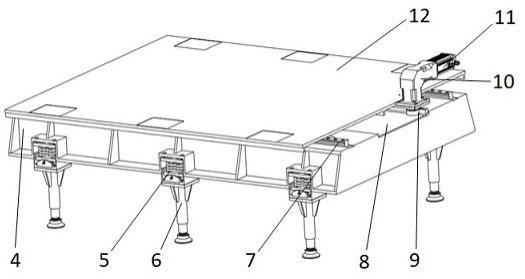
18.如图1 所示,本实施例的背驮式平台1包括有一个采用箱梁式结构的床身4,箱梁式结构可以保证平台的强度刚性,在床身4上部设置有移动平台12,在床身4内部设置有直线导轨7,移动平台12设置在直线导轨7上,伺服电机11驱动减速机10带动齿轮齿条9工作,从而带动移动平台12沿着直线导轨7移动。
19.如图2所示,本实施例的背驮式平台1上根据需要可以设置一套或多套三自由度调姿系统2,三自由度调姿系统2包括对称固定连接在移动平台12上的垂直导轨安装座17,垂直导轨安装座17上设置有垂直直线导轨16,升降台18的一端通过升降机15连接到垂直直线导轨16上,伺服电机13驱动减速机14带动升降机15运动,从而实现整个升降台18沿着z轴方向升降移动。
20.在升降台18上设置有水平直线导轨19,水平直线导轨19上设置有横移安装座24,在升降台18上设置有减速机安装座21,横移安装座24上设置有丝杠螺母安装座23,丝杠副22由伺服电机13和减速机20驱动,从而实现横移安装座24沿着y轴进行横移移动。
21.横移安装座24上设置有弧形导轨,弧形导轨上设置有滚转托架26,滚转托架26通过滚轮25沿着弧形导轨滑动。滚轮25由一组伺服电机13和减速机14驱动。从而实现被支撑件可以沿着a轴进行滚轴。
22.如图4所示,当具有两组三自由度调姿系统2时,两组系统进行配合操作时,可以使得被支撑件进行六个空间自由度的姿态调整,分别为x(轴向)向、y(横移) 向、z(升降)向、a(滚转)轴、b(俯仰)轴、c(偏转)。每套三自由度调姿系统具有三个自由度,分别是y(横移)向、z(升降)向和a(滚转)轴自由度。y(横移)向的传动通过精密直线导轨和滚珠丝杆传动,
采用伺服电机实现精确控制,z(升降)向通过螺旋升降机传动,采用伺服电机实现精确控制,a(滚转)轴通过伺服电机驱动滚轮转动,传递到内部齿条实现滚转。
23.如图3所示,在本实施例中,配置一套两自由度调姿系统3。两自由度调姿系统3,两自由度调姿系统3的结构与三自由度调姿系统2的结构基本一致,包括升降台27和设置在升降台27上的固定托架28。两自由度调姿系统3具有两个自由度,分别是y(横移)向、z(升降)向自由度,z(升降)向通过螺旋升降机传动,采用伺服电机实现精确控制。y(横移)向自由度为开放状态。两自由度调姿系统3用于特殊状态下对该航天产品的支撑。
24.实施例一1)可移动背驮式大直径航天产品自动对接平台在准备工位接收航天产品(发动机、部段)。
25.2)系统控制软件给潜伏式agv下发指令任务,潜伏式agv按照程序自动运行至准备工位,将可移动背驮式大直径航天产品自动对接平台背驮至装配对接工位,停车定位,放置可移动背驮式大直径航天产品自动对接平台,潜伏式agv离开;3)根据装配对接工位地面状态,减震调平机构自动适应地面,无需进行人工调整,即可保证移动背驮式平台的水平度要求达到0.05mm;4)以另一台可移动背驮式大直径航天产品自动对接平台上的航天产品为参照,人工控制两套三自由度调姿系统的螺旋升降机进行z向调节,对航天产品进行b(俯仰)轴姿态调整;5)人工控制两套三自由度调姿系统的丝杠副进行y向调节,实现对航天产品进行c(偏转)轴姿态调整;6)人工控制两套三自由度调姿系统2的滚轮25,实现对航天产品进行a(偏转)轴姿态调整;7)待a(滚转)轴、b(俯仰)轴、c(偏转)轴对齐后,开始对接,通过控制移动平台沿x轴进行移动,直到与参照产品对齐,端面预留30mm,经操作人员进一步确认后,操作移动平台继续沿x轴进行移动,直到两个航天产品对接完成。
26.本发明并不局限于前述的具体实施方式。本发明扩展到任何在本说明书中披露的新特征或任何新的组合,以及披露的任一新的方法或过程的步骤或任何新的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1