一种高精度冷光源金属激光打孔设备的制作方法
1.本发明涉及激光打孔设备技术领域,具体的说,涉及一种高精度冷光源金属激光打孔设备。
背景技术:
2.激光加工过程称为“光蚀”效应,“冷加工”具有高负荷能量的光子,能够打断材料或周围介质内的化学键,使材料发生非热过程破坏,这种冷加工不是热烧蚀,而是不产生“热损伤”来打断化学键的冷剥离,因而对被加工表面的里层和附近区域不产生加热或热变形等影响,所加工出来的材料具有光滑的边沿和极低限度的碳化,因此,冷光源激光打标机适用于现在的加工,拥有较小的热影响区,所以在加工的时候,不会影响标记表面的周边材料。
3.激光打孔设备逐渐取代传统打孔机地位,而目前市面上的激光打孔设备在进行打孔作业时,打孔精度低且孔径大,需要调节激光打孔设备的位置方可实现,无法通过控制振镜的角度摆动幅度,对多个打孔位置进行小孔径打孔加工,为此,传统激光打孔设备打孔速度慢,效率低下。
技术实现要素:
4.本发明的目的在于克服上述传统技术的不足之处,提供一种可以控制激光角度摆动幅度,提高打孔效率的高精度冷光源金属激光打孔设备。
5.本发明的目的是通过以下技术措施来达到的:一种高精度冷光源金属激光打孔设备,其特征在于:包括加工台,所述加工台上表面固定连接有激光箱,所述激光箱侧面固定连接有冷光源激光器,所述冷光源激光器下表面连接有位置接收器,所述冷光源激光器下表面连接有激光头,所述激光箱连接有激光打孔机构,所述加工台下表面固定连接有支架,所述支架上表面连接有旋转定位机构。
6.作为一种改进:所述激光打孔机构包括时间继电器,所述时间继电器与冷光源激光器侧面连接,所述激光箱侧面连接有第一伺服马达和第二伺服马达,所述激光箱内靠近激光头的一端固定连接有聚焦物镜。
7.作为一种改进:所述激光箱内部开设有环形导轨,所述环形导轨内滑动连接有限位凸块,所述激光箱外侧固定连接有视觉定位相机。
8.作为一种改进:所述第一伺服马达输出端连接有第一减速器一端,所述第一减速器另一端连接有x扫描振镜,所述x扫描振镜远离第一减速器的一端连接有第一角度传感器,所述x扫描振镜端部与限位凸块固定连接。
9.作为一种改进:所述第二伺服马达输出端连接有第二减速器一端,所述第二减速器另一端连接有y扫描振镜,所述y扫描振镜远离第二减速器的一端连接有第二角度传感器,所述y扫描振镜与限位凸块固定连接。
10.作为一种改进:所述旋转定位机构包括步进电机,所述步进电机与支架下表面固
定连接,所述步进电机输出端固定连接有减速机,所述减速机输出端连接有置物盘。
11.作为一种改进:所述加工台开设有环形滑槽,所述置物盘侧壁固定连接有限位滑块,所述限位滑块与环形滑槽滑动连接。
12.作为一种改进:表面连接有静电吸附器,所述静电吸附器连接有多个静电导线,多个所述静电导线均电性连接有静电吸附座,所述静电吸附座位于置物槽内。
13.作为一种改进:所述置物盘上表面固定连接有多个位置发送器,多个所述位置发送器与置物槽相对设置。
14.与现有技术相比,本发明的有益效果是:通过设置激光打孔机构,可以通过安装时间继电器控制金属的单次激光打孔时间,由第一伺服马达和第二伺服马达提供驱动来源,通过第一减速器、x扫描振镜、第一角度传感器、第二减速器、y扫描振镜、第二角度传感器、聚焦物镜和视觉定位相机的配合调整,通过控制x扫描振镜和y扫描振镜的角度摆动幅度变化,对金属上多个打孔位置实现小孔径打孔加工的效果,加快金属上多个打孔位置的打孔速度,提高金属的打孔效率,通过设置旋转定位机构,由步进电机提供驱动来源,再由减速机、置物盘和置物槽之间相互配合,便于使用者同时放置五组待打孔金属,同时也可对五组待打孔金属进行逐步旋转调节,满足每一组待打孔金属的激光打孔需求,再通过静电吸附器、静电导线和静电吸附座的配合,对五组待打孔金属采用静电吸附方式进行定位,避免五组待打孔金属在旋转时和激光打孔时发生位移,提高五组待打孔金属的打孔精准度。
15.x扫描振镜、y扫描振镜、聚焦物镜和激光头的纵轴线位于同一竖直线上,使冷光源激光器发出的激光光束精准到达激光头发射位置,满足金属的正常激光打孔需求,通过聚焦物镜的镜片面积分别大于x扫描振镜和y扫描振镜的镜片面积,满足x扫描振镜和y扫描振镜角度调节后激光光束的聚焦需求,对不同位置的激光光束进行全面且有效聚焦处理,通过定位槽,便于使用者将待打孔的金属放置在静电吸附座上。
16.通过位置发送器和位置接收器,对每一组置物槽内放置金属的位置进行逐个感应,提高金属旋转停止后的位置精准性,通过环形导轨和限位凸块,对x扫描振镜和y扫描振镜角度幅度调节时提供限位滑动补偿,提高x扫描振镜和y扫描振镜角度幅度调节时的平稳性,通过环形滑槽和限位滑块,对置物盘起到滑动限位补偿,提高置物盘转动的稳定性,避免置物盘旋转时发生歪斜导致内部放置的耳机膜片出现位移。
附图说明
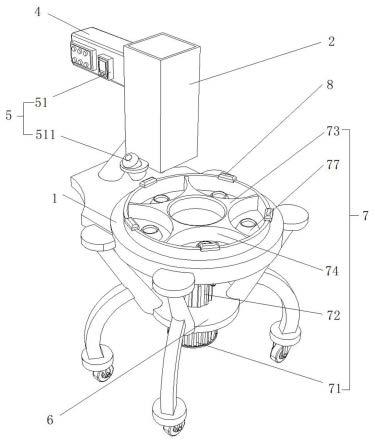
17.图1为本发明的立体结构示意图。
18.图2为本发明的另一角度立体结构示意图。
19.图3为图1中激光箱的内部剖面结构示意图。
20.图4为图3中激光打孔机构的立体结构示意图。
21.图5为图1中置物盘的局部结构示意图。
22.图6为图5中静电吸附座的结构示意图。
23.图中:1、加工台;2、激光箱;3、激光头;4、冷光源激光器;5、激光打孔机构;51、时间继电器;52、第一伺服马达;53、第一减速器;54、x扫描振镜;55、第一角度传感器;56、第二伺服马达;57、第二减速器;58、y扫描振镜;59、第二角度传感器;510、聚焦物镜;511、视觉定位
相机;6、支架;7、旋转定位机构;71、步进电机;72、减速机;73、置物盘;74、置物槽;75、静电吸附器;76、静电导线;77、静电吸附座;8、位置发送器;9、位置接收器;10、环形导轨;11、限位凸块;12、环形滑槽;13、限位滑块。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.实施例:如附图1至6所示,一种高精度冷光源金属激光打孔设备,包括加工台1,所述加工台1上表面固定连接有激光箱2,所述激光箱2侧面固定连接有冷光源激光器4,所述冷光源激光器4下表面连接有位置接收器9,所述冷光源激光器4下表面连接有激光头3,所述激光箱2连接有激光打孔机构5,所述加工台1下表面固定连接有支架6,所述支架6上表面连接有旋转定位机构7。所述冷光源激光器4侧面可以连接控制器,控制器可以用来控制和调节冷光源激光器4。
26.所述激光打孔机构5包括时间继电器51,所述时间继电器51与冷光源激光器4侧面连接,所述激光箱2侧面连接有第一伺服马达52和第二伺服马达56,所述激光箱2内靠近激光头3的一端固定连接有聚焦物镜510,所述激光箱2内部开设有环形导轨10,所述环形导轨10内滑动连接有限位凸块11,所述激光箱2外侧固定连接有视觉定位相机511。通过环形导轨10和限位凸块11,对x扫描振镜54和y扫描振镜58的角度幅度调节时提供限位滑动补偿,提高x扫描振镜54和y扫描振镜58角度幅度调节时的平稳性,所述第一伺服马达52输出端连接有第一减速器53一端,所述第一减速器53另一端连接有x扫描振镜54,所述x扫描振镜54远离第一减速器53的一端连接有第一角度传感器55,所述x扫描振镜54端部与限位凸块11固定连接,所述第二伺服马达56输出端连接有第二减速器57一端,所述第二减速器57另一端连接有y扫描振镜58,所述y扫描振镜58远离第二减速器57的一端连接有第二角度传感器59,所述y扫描振镜58与限位凸块11固定连接。可通过控制x扫描振镜54和y扫描振镜58的角度摆动幅度变化,对金属上多个打孔位置实现小孔径打孔加工的效果,加快耳机膜片上多个打孔位置的打孔速度,提高耳机膜片的打孔效率,x扫描振镜54、y扫描振镜58、聚焦物镜510和激光头3的纵轴线位于同一竖直线上,使冷光源激光器4发出的激光光束精准到达激光头3发射位置,满足金属的正常激光打孔需求,通过聚焦物镜510的镜片面积分别大于x扫描振镜54和y扫描振镜58的镜片面积,满足x扫描振镜54和y扫描振镜58角度调节后激光光束的聚焦需求,对不同位置的激光光束进行全面且有效聚焦处理。
27.所述旋转定位机构7包括步进电机71,所述步进电机71与支架6下表面固定连接,所述步进电机71输出端固定连接有减速机72,所述减速机72输出端连接有置物盘73,所述加工台1开设有环形滑槽12,所述置物盘73侧壁固定连接有限位滑块13,所述限位滑块13与环形滑槽12滑动连接,表面连接有静电吸附器75,所述静电吸附器75连接有多个静电导线76,多个所述静电导线76均电性连接有静电吸附座77,所述静电吸附座77位于置物槽74内,所述置物盘73上表面固定连接有多个位置发送器8,多个所述位置发送器8与置物槽74相对设置。通过设置旋转定位机构7,由步进电机71提供驱动来源,再由减速机72、置物盘73和置
物槽74的配合,便于使用者同时放置五组待打孔金属,同时也可对五组待打孔金属进行逐步旋转调节,满足每一组待打孔耳机膜片的激光打孔需求,通过位置发送器8和位置接收器9,对每一组置物槽74内放置金属的位置进行逐个感应,提高金属旋转停止后的位置精准性,通过环形滑槽12和限位滑块13,对置物盘73起到滑动限位补偿,提高置物盘73转动的稳定性,避免置物盘73旋转时发生歪斜导致内部放置的金属出现位移,通过静电吸附器75、静电导线76和静电吸附座77的配合,对五组待打孔金属采用静电吸附方式进行定位,避免五组待打孔金属旋转时和激光打孔时发生位移,提高对五组待打孔金属的打孔精准度。
28.工作原理:技术人员先按金属打孔位置设定好第一角度传感器55和第二角度传感器59的角度调节幅度指令,接着使用者分别将五组待打孔的金属放入置物盘73上的五组置物槽74内,使五组金属的中心位置位于五组静电吸附座77上,然后开启静电吸附器75产生静电,然后静电经过五根静电导线76同步到达五组静电吸附座77上,然后携带静电的五组静电吸附座77对五组待打孔的金属同步静电吸附固定,接着控制步进电机71带动置物盘73上五组置物槽74内的待打孔的金属匀速转动。
29.当第一组置物槽74上的位置发送器8旋转至激光箱2底部的位置接收器9感应位置时,控制步进电机71暂停,控制减速机72带动置物盘73减速,直至第一组置物槽74内的第一组待打孔的金属旋转至激光头3正下方位置时停止,再由视觉定位相机511对第一组待打孔金属上的第一步打孔位置进行拍照定位,然后控制冷光源激光器4发射激光光束,由时间继电器51控制冷光源激光器4单次发射激光光束的时间,激光光束经过x扫描振镜54和y扫描振镜58折射后到达聚焦物镜510上,激光光束再经过聚焦物镜510聚焦后由激光头3发射至第一组待打孔金属上的第一步打孔位置,并完成第一步激光打孔作业。
30.在对第一组待打孔金属上的第二步打孔位置激光打孔时,控制第一伺服马达52带动x扫描振镜54进行角度幅度调节,当x扫描振镜54角度调节至符合第一角度传感器55预定程度角度值时,由第一减速器53控制x扫描振镜54停止,与此同时,控制第二伺服马达56带动y扫描振镜58进行角度幅度调节,当y扫描振镜58角度调节至符合第二角度传感器59预定程度角度值时,由第二减速器57控制y扫描振镜58停止,此时,再由视觉定位相机511对第一组待打孔金属上的第二步打孔位置进行拍照定位验证,接着控制冷光源激光器4继续发射激光光束,同理,完成第二步激光打孔作业。
31.以此类推,完成对第一组待打孔金属上剩余打孔位置的激光打孔作业,直至置物盘73上剩余四组置物槽74内的待打孔的金属全部完成激光打孔作业即可,且金属上激光打孔的孔径控制在10-100um之间,使金属打孔位置形成合格孔径的微孔形态。
32.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
33.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1