一种低压铸造自动化生产线的制作方法
[0001]
本发明涉及低压铸造技术领域,尤其涉及的是一种低压铸造自动化生产线。
背景技术:
[0002]
将铝液制作成为铝合金压铸件所需的工作机构一般为:熔解炉、压铸机、渣包去除设备、料柄去除设备和冷却设备,实际使用时,工人需要多次打开熔解炉炉体上的箱门,以用于将铝锭和金属料渣送入熔解炉内熔解成铝液,压铸机上的自动取汤勺机构从熔解炉中捞取铝液,并将铝液送入压铸机体上的浇铸系统上,使铝液从该处被灌入压铸机中的压铸模具内。压铸机使压铸模具开模后,工人需要手持夹具取出压铸件,并放置到冷却设备中将压铸件冷却后,再依次将压铸件放置到渣包去除设备和料柄去除设备中,以用于去除压铸件边缘的渣包和压铸件上的料柄,值得提醒的是,料柄和渣包均在压铸模具内形成,现有技术中无法在压铸时将渣包和料柄去除。上述机构在使用时的缺点:第一,工人需要将压铸件送至其他指定加工位进行后续加工,不仅费时费力,生产效率低下,而且在高温炉体旁和夹持高温压铸件时工人难以得到有效的物理防护。第二,生产产生的料柄和渣包碎屑无法得到有效的收集和输送(用于二次熔铝),未对废料实现有效资源管理,造成物料堆积和浪费。第三,生产压铸件的机构均以“一炉一压”为标准,即一台压铸机配合一台熔解炉使用,若工厂内同时启动多台压铸机和熔解炉进行工作时,会造成大量的能源消耗,且每组上述机构均需至少一名工人看管和操作,造成人力物力的浪费,不利于工厂的可持续发展。
[0003]
因此,提供一种新的技术方案以解决上述技术问题。
技术实现要素:
[0004]
本发明的目的在于提供一种低压铸造自动化生产线。
[0005]
本发明所设计的技术方案如下:一种低压铸造自动化生产线,其中,包括一熔铝单元、铝液运送单元、第一废料输送带机构和多组产品加工单元,多组所述产品加工单元沿所述第一废料输送带机构的输送方向直线排列式设置在所述第一废料输送带机构一侧,所述第一废料输送带机构用于将所述产品加工单元生产出的压铸件废料输送到第一取件工位处,所述铝液运送单元在所述熔铝单元的第一取汤口处将铝液捞起并运送到任意一组所述产品加工单元处;所述产品加工单元包括铝液保温炉、喷淋机器人、压铸机本体、冷却机构、取件机器人、渣包去除机构、料柄去除机构、产品输送带机构和第二废料输送带机构;所述铝液运送单元将铝液运送并倒灌进任意一组所述产品加工单元中的所述铝液保温炉中;当所述压铸机本体上的压铸模具处于合模状态时,所述压铸机本体上的自动取汤勺机构在所述铝液保温炉上的第二取汤口处将铝液捞起并送至所述压铸机本体中的浇铸系统内;当所述压铸机本体上的压铸模具处于开模状态时,所述取件机器人将所述压铸模具上的压铸件取出,所述喷淋机器人朝压铸模具表面喷涂脱模剂,所述冷却机构对所述取件机器人上的压铸件进行冷却,所述渣包去除机构对所述取件机器人上的压铸件边缘处渣包进行反复捶打动作,所述
料柄去除机构对压铸件上的料柄进行锤击动作并将去除料柄后的压铸件送至所述产品输送带机构上,所述第二废料输送带机构将压铸件的渣包和料柄输送到所述第一废料输送带机构上,所述产品输送带机构用于将所述料柄去除机构上的压铸件输送到第二取件工位处。
[0006]
所述的低压铸造自动化生产线,其中,所述铝液运送单元包括单轨吊车机构和取汤机构,所述单轨吊车机构包括支撑架、单轨和在所述单轨上移动的自行走吊车本体,所述支撑架用于支撑所述单轨,所述单轨沿所述第一废料输送带机构的输送方向延伸并设置在所述第一废料输送带机构上方,所述取汤机构安装在所述自行走吊车本体的车架上。
[0007]
所述的低压铸造自动化生产线,其中,所述取汤机构包括安装架、第一竖直传动结构、第二竖直传动结构和勺体,所述安装架连接在所述自行走吊车本体的底部,所述第一竖直传动结构通过第一安装座连接在所述安装架上,所述第二竖直传动结构通过第二安装座连接在所述安装架上,所述第一竖直传动结构上连接有第三安装座和转轴结构,所述转轴结构通过第一轴承结构与所述第三安装座相连接,所述勺体通过第二轴承结构与所述转轴结构连接,所述第二竖直传动结构与所述勺体连接。
[0008]
所述的低压铸造自动化生产线,其中,所述喷淋机器人包括第一多轴机器人本体和由所述第一多轴机器人本体带动的喷淋结构;所述喷淋结构包括喷淋箱,所述喷淋箱为矩形箱体结构,所述喷淋箱正面连接有多排第一雾化喷嘴和多排第一吹气嘴,所述喷淋箱背面连接有多排第二雾化喷嘴和多排第二吹气嘴,所述喷淋箱内设置有药剂管路和进气管,所述第一雾化喷嘴和所述第二雾化喷嘴与所述药剂管路连接,所述第一吹气嘴和所述第二吹气嘴与所述进气管连接,所述药剂管路上连接第一电动调节阀,所述进气管上连接第二电动调节阀;所述第一电动调节阀用于调整和控制所述第一雾化喷嘴和所述第二雾化喷嘴的喷淋压力和开关,所述第二电动调节阀用于调整和控制所述第一吹气嘴和所述第二吹气嘴的吹气压力和开关。
[0009]
所述的低压铸造自动化生产线,其中,所述冷却机构包括水箱,所述水箱顶部开口,所述水箱内壁上安装有多排第三吹气嘴,所述水箱底部安装有滤网,所述滤网使用不锈钢材质,所述滤网通过可拆卸结构与所述水箱内壁连接。
[0010]
所述的低压铸造自动化生产线,其中,所述渣包去除机构包括第一机架和气动锤本体,所述气动锤本体安装在所述第一机架上,所述第一机架上设置有第一挡板和三个第二挡板,所述第一挡板位于所述气动锤本体上方,三个所述第二挡板分别位于所述气动锤本体两侧面和背面,所述机架上连接有料斗,所述气动锤本体位于所述料斗上方,所述料斗位于所述第二废料输送带机构上方。
[0011]
所述的低压铸造自动化生产线,其中,所述料柄去除机构包括第二机架、第一气缸、第二气缸、工作台和第三气缸,所述第一气缸、所述第二气缸、所述工作台和所述第三气缸均安装在所述第二机架上,所述第一气缸和所述第二气缸均设置在所述工作台上方,所述第一气缸的垂直投影落在所述工作台表面,所述第一气缸的活塞轴上连接有压块,所述第二气缸的活塞轴上连接有冲头,所述第二气缸的垂直投影落在所述第二废料输送带机构表面,所述第三气缸设置在所述工作台一侧,所述第三气缸的活塞轴上连接有推板,所述第三气缸带动推板将所述工作台上的压铸件推落至所述产品输送带机构上。
[0012]
所述的低压铸造自动化生产线,其中,所述产品输送带机构上安装有多组风扇结
构,以用于对所述产品输送带机构上的压铸件进行冷却;所述产品输送带机构的进口处安装有光电传感器。
[0013]
所述的低压铸造自动化生产线,其中,所述喷淋机器人安装在一高台上,所述高台位于所述压铸机本体一侧,所述喷淋机器人位于所述压铸机本体上方。
[0014]
所述的低压铸造自动化生产线,其中,所述取件机器人包括第二多轴机器人本体和由所述第二多轴机器人本体带动的气动夹爪本体。
[0015]
本发明有益效果:本发明可实现熔铝、铝液输送、压铸件成型、压铸件去渣包、压铸件去料柄、废料收集运输和成品收集运输等功能,全程自动化、无间断式生产,有效减少人工操作、增加生产效率和对废料进行有效收集利用,一个熔铝单元可对为多台压铸机提供熔铝所需铝液,极大地减少了能源消耗。
附图说明
[0016]
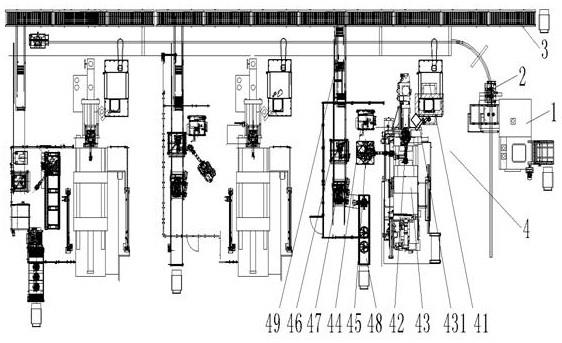
图1是本发明的平面结构示意图。
[0017]
图2是本发明的立体结构示意图。
[0018]
图3是本发明中铝液运送单元的剖面结构简图。
[0019]
图4是本发明中喷淋结构的平面结构示意图。
[0020]
图5是本发明中冷却机构的立体结构示意图。
[0021]
图6是本发明中渣包去除机构的主视图。
[0022]
图7是本发明中料柄去除机构的立体结构示意图。
[0023]
图中标号:1、熔铝单元;2、铝液运送单元;21、单轨吊车机构;211、支撑架;212、单轨;213、自行走吊车本体;22、取汤机构;221、安装架;222、第一竖直传动结构;223、第二竖直传动结构;224、勺体;225、第三安装座;226、转轴结构;3、第一废料输送带机构;4、产品加工单元;41、铝液保温炉;42、喷淋机器人;421、喷淋箱;422、第一雾化喷嘴;423、第一吹气嘴;424、第二雾化喷嘴;425、第二吹气嘴;43、压铸机本体;431、自动取汤勺机构;44、冷却机构;441、水箱;442、第三吹气嘴;443、滤网;45、取件机器人;46、渣包去除机构;461、第一机架;462、气动锤本体;463、第一挡板;464、第二挡板;465、料斗;47、料柄去除机构;471、第二机架;472、第一气缸;473、第二气缸;474、工作台;475、第三气缸;476、压块;477、冲头;478、推板;48、产品输送带机构;49、第二废料输送带机构。
具体实施方式
[0024]
下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
[0025]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指 示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数
量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0026]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0027]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0028]
下文的公开提供了许多不同的实施方式或例子用来实现本发明的不同结构。为了简化本发明的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本发明。此外,本发明可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本发明提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
[0029]
本发明为了解决上述问题,如图1和图2所示,提供一种低压铸造自动化生产线,包括熔铝单元1、铝液运送单元2、第一废料输送带机构3和多组产品加工单元4,多组该产品加工单元4沿该第一废料输送带机构3的输送方向直线排列式设置在该第一废料输送带机构3一侧,该第一废料输送带机构3用于将该产品加工单元4生产出的压铸件废料输送到第一取件工位(图中未标出)处,该铝液运送单元2在该熔铝单元1的第一取汤口(图中未标出)处将铝液捞起并运送到任意一组该产品加工单元4处。
[0030]
本实施例中,该产品加工单元4包括铝液保温炉41、喷淋机器人42、压铸机本体43、冷却机构44、取件机器人45、渣包去除机构46、料柄去除机构47、产品输送带机构48和第二废料输送带机构49;该铝液运送单元2将铝液运送并倒灌进任意一组该产品加工单元4中的该铝液保温炉41中;当该压铸机本体43上的压铸模具处于合模状态时,该压铸机本体43上的自动取汤勺机构431在该铝液保温炉41上的第二取汤口(图中未标出)处将铝液捞起并送至该压铸机本体43中的浇铸系统内;当该压铸机本体43上的压铸模具处于开模状态时,该取件机器人45将该压铸模具上的压铸件取出,该喷淋机器人42朝压铸模具表面喷涂脱模剂,该冷却机构44对该取件机器人45上的压铸件进行冷却,该渣包去除机构46对该取件机器人45上的压铸件边缘处渣包进行反复捶打动作,该料柄去除机构47对压铸件上的料柄进行锤击动作并将去除料柄后的压铸件送至该产品输送带机构48上,该第二废料输送带机构49将压铸件的渣包和料柄输送到该第一废料输送带机构3上,该产品输送带机构48用于将该料柄去除机构47上的压铸件输送到第二取件工位处。
[0031]
本发明工作原理:工人将铝锭送至熔铝单元1中熔成铝液后,该铝液运送单元2在该熔铝单元1的第一取汤口处将铝液捞起并运送到任意一组该产品加工单元4中的铝液保
温炉41中存储;当该压铸机本体43上的压铸模具处于合模状态时,该压铸机本体43上的自动取汤勺机构431在该铝液保温炉41上的第二取汤口处将铝液捞起并送至该压铸机本体43中的浇铸系统内;当该压铸机本体43上的压铸模具处于开模状态时,该取件机器人45将该压铸模具上的压铸件取出,该喷淋机器人42朝压铸模具表面喷涂脱模剂(有利于压铸件脱模),取件机器人45将压铸件送至冷却机构44处,该冷却机构44对该取件机器人45上的压铸件进行冷却,冷却工序完成后,取件机器人45将压铸件送至渣包去除机构46处,该渣包去除机构46对该取件机器人45上的压铸件边缘处渣包进行反复捶打动作,去除渣包后,取件机器人45将压铸件送至该料柄去除机构47处,料柄去除机构47对压铸件上的料柄进行锤击动作并将去除料柄后的压铸件送至该产品输送带机构48上,该产品输送带机构48用于将该料柄去除机构47上的压铸件输送到第二取件工位处,使工人可对该处的压铸件成品进行统一收集处理;在去除渣包和去除料柄的工序和机构中,压铸件上的渣包和料柄会落至第二废料输送带机构49上,该第二废料输送带机构49将压铸件的渣包和料柄输送到该第一废料输送带机构3上,使第一废料输送带机构3将上述废料送至第一取件工位处,可使工人对废料进行统一收集处理,例如用斗车对废料进行收集,并将废料送入熔解炉中二次熔解使用。本发明可实现熔铝、铝液输送、压铸件成型、压铸件去渣包、压铸件去料柄、废料收集运输和成品收集运输等功能,且全程自动化、无间断式生产,有效减少人工操作、增加生产效率和对废料进行有效收集利用。实际使用时,本发明使用一台较大功率的熔解炉一次性生产较大体积的铝液以用于代替多台溶解炉同时工作,并在每台压铸机本体43前加装一个铝液保温炉41增加储液量,不仅可使一台溶解炉供应多台压铸机所需铝液,与传统使用多台小功率熔解炉同时开机生产铝液相比,可减少能耗30%-40%。因此,本发明中一个熔铝单元1不仅可为多台压铸机提供熔铝所需铝液,且极大地减少了能源消耗。另一方面,对作为生产线源头的熔铝单元1来说,控制熔铝单元1的个数,更降低了将本发明中多台不同生产设备整合到一起的工作难度。
[0032]
由于多组产品加工单元4沿输送带的输送方向直线排列式布置,因此,铝液输送距离较远,为解决上述技术问题,本实施例中,如图3所示,该铝液运送单元2包括单轨212吊车机构21和取汤机构22,该单轨212吊车机构21包括支撑架211、单轨212和在该单轨212上移动的自行走吊车本体213,该支撑架211用于支撑该单轨212,该单轨212沿该第一废料输送带机构3的输送方向延伸并设置在该第一废料输送带机构3上方,该取汤机构22安装在该自行走吊车本体213的车架上。当取汤机构22取到铝液后,自行走吊车本体213带动取汤机构22沿输送带输送方向或反向移动,以用于将取汤机构22带动至任意产品加工单元4处。单轨212吊车机构21的设置目的在于:满足在较远距离上铝液自动化取送需求。单轨212吊车机构21为现有技术,本文不再赘述。
[0033]
在进一步的实施例中,该取汤机构22包括安装架221、第一竖直传动结构222、第二竖直传动结构223和勺体224,该安装架221连接在该自行走吊车本体213的底部,该第一竖直传动结构222通过第一安装座(图中未标出)连接在该安装架221上,该第二竖直传动结构223通过第二安装座(图中未标出)连接在该安装架221上,该第一竖直传动结构222上连接有第三安装座225和转轴结构226,该转轴结构226通过第一轴承结构(图中未标出)与该第三安装座225相连接,该勺体224通过第二轴承结构(图中未标出)与该转轴结构226连接,该第二竖直传动结构223与该勺体224连接。实际应用中,第一竖直传动结构222带动勺体224
上下运动,当其带动勺体224向下运动时,将勺体224伸入熔解炉中盛出铝液后,再向上带动勺体224脱离熔解炉取汤口处。当需要将勺体224中的铝液倒灌进铝液保温炉41中时,第二竖直传动结构223带动勺体224一端向上倾斜,使勺体224另一端向下倾斜,使勺体224中的铝液被倾倒出。实际应用中,第一竖直传动结构222和第二竖直传动结构223均为气缸。
[0034]
本实施例中,该喷淋机器人42包括第一多轴机器人本体和由该第一多轴机器人本体带动的喷淋结构。如图4所示,该喷淋结构包括喷淋箱421,该喷淋箱421为矩形箱体结构,该喷淋箱421正面连接有多排第一雾化喷嘴422和多排第一吹气嘴423,该喷淋箱421背面连接有多排第二雾化喷嘴424和多排第二吹气嘴425,该喷淋箱421内设置有药剂管路(图中未画出)和进气管(图中未画出),该第一雾化喷嘴422和该第二雾化喷嘴424与该药剂管路连接,该第一吹气嘴423和该第二吹气嘴425与该进气管连接,该药剂管路上连接第一电动调节阀(图中未画出),该进气管上连接第二电动调节阀(图中未画出);该第一电动调节阀用于调整和控制该第一雾化喷嘴422和该第二雾化喷嘴424的喷淋压力和开关,该第二电动调节阀用于调整和控制该第一吹气嘴423和该第二吹气嘴425的吹气压力和开关。实际应用时,在喷淋前,工人可先在外接容器中按要求配比脱模剂,并将该容器通过药剂管路与喷淋箱421连接,以用于为喷淋箱421提供所需药剂。喷淋箱421采用矩形箱体结构,并在矩形箱体结构正反面安装喷嘴和吹气嘴的目的在于:压铸机开模后,露出相互分离压铸模具,压铸模具包括动模和定模(该结构为现有技术,本文不再赘述),因此,为增加喷涂效率,使该喷淋箱421可同时对动模和定模进行药剂喷淋工作,而采用矩形箱体结构便于安装和布置喷淋结构,且在平面上均匀布置喷淋结构更有利于保证喷淋效果,便于使喷淋结构对重点喷淋位置实现喷淋作用。雾化喷嘴用于朝压铸模具喷淋雾化脱模剂,吹气嘴用于使压铸模具表面干燥。第一多轴机器人本体(实际应用中亦称多轴机械手)可带动喷淋箱421朝任意方向运动,第一多轴机器人本体为现有技术,本文不再赘述。
[0035]
本实施例中,如图5所示,该冷却机构44包括水箱441,该水箱441顶部开口,该水箱441内壁上安装有多排第三吹气嘴442,该水箱441底部安装有滤网443,该滤网443使用不锈钢材质,该滤网443通过可拆卸结构(图中未标出)与该水箱441内壁连接。压铸件被取件机器人45带动并没入水中冷却,第三吹气嘴442外接供气设备(图中未画出),第三吹气嘴442用于对压铸件表面的残留水分进行吹干。滤网443可防止压铸件表面金属碎屑落入水箱441底部,从而便于对金属碎屑进行清理。可拆卸结构可为连接在水箱441两侧内壁上的卡块,滤网443可直接受卡块承托。
[0036]
本实施例中,如图6所示,该渣包去除机构46包括第一机架461和气动锤本体462,该气动锤本体462安装在该第一机架461上,该第一机架461上设置有第一挡板463和三个第二挡板464,该第一挡板463位于该气动锤本体462上方,三个该第二挡板464分别位于该气动锤本体462两侧面和背面,该机架上连接有料斗465,该气动锤本体462位于该料斗465上方,该料斗465位于该第二废料输送带机构49上方。气动锤上的垂体连续往复运动,敲打压铸件上的渣包、流道等部位,被敲打下的金属碎屑落入料斗465后落至第二废料输送带机构49上被输送至下一工位上,可防止料斗465下方废料堆积。在气动锤本体462顶部和其三个侧面设置挡板的目的在于:防止敲打产生的金属碎屑在室内随意飘飞,可有效增加对金属碎屑的收集效果。
[0037]
本实施例中,如图7所示,该料柄去除机构47包括第二机架471、第一气缸472、第二
气缸473、工作台474和第三气缸475,该第一气缸472、该第二气缸473、该工作台474和该第三气缸475均安装在该第二机架471上,该第一气缸472和该第二气缸473均设置在该工作台474上方,该第一气缸472的垂直投影落在该工作台474表面,该第一气缸472的活塞轴上连接有压块476,该第二气缸473的活塞轴上连接有冲头477,该第二气缸473的垂直投影落在该第二废料输送带机构49表面,该第三气缸475设置在该工作台474一侧,该第三气缸475的活塞轴上连接有推板478,该第三气缸475带动推板478将该工作台474上的压铸件推落至该产品输送带机构48上。当压铸件被放置到工作台474上时,第一气缸472带动压块476向下压在压铸件表面,以用于将压铸件固定在工作台474上,第二气缸473带动冲头477向下运动,使料柄折断后落至第二废料输送带机构49上,而后该第三气缸475带动推板478将该工作台474上的压铸件推落至该产品输送带机构48上。
[0038]
在进一步的实施例中,该产品输送带机构48上安装有多组风扇结构(图中未标出),以用于对该产品输送带机构48上的压铸件进行冷却;该产品输送带机构48的进口处安装有光电传感器(图中未画出),用于检测产品输送带机构48上的物料状态,防止制品堆叠、碰撞。实际应用中,产品输送带机构48主体由机架(图中未标出)、输送带(或称带传动机构,图中未标出)和传动电机(图中未标出)等组成,该结构为现有技术,本文不再赘述。同理地,第一废料输送带机构3和第二废料输送带机构49也均可由上述结构组成,本文不再赘述。
[0039]
本实施例中,该取件机器人45包括第二多轴机器人本体和由该第二多轴机器人本体带动的气动夹爪本体。第二多轴机器人本体(实际应用中亦称多轴机械手)可带动气动夹爪本体朝任意方向运动,第二多轴机器人本体和气动夹爪本体结构均为现有技术,本文不再赘述。气动夹爪本体抓取压铸件料柄部位,通过压缩空气驱动气缸活塞运动,实现夹爪开闭运动。机械手配合多轴机械手的软伺服功能与压铸机本体43顶针进行协调运作,以用于将压铸件从压铸模具上取出。
[0040]
由于取件机器人45需要将压铸件带动至多处加工位上,因此,实际应用中,取件机器人45置于工厂地面上,并位于其他加工设备所围成立体空间的中心处,但喷淋机器人42仅作用于压铸机本体43上,因此,为了减少占地面积,在进一步的实施例中,该喷淋机器人42安装在一高台(图中未标出)上,该高台位于该压铸机本体43一侧,该喷淋机器人42位于该压铸机本体43上方,工人可从高台侧面的爬梯登上高台对喷淋机器人42进行检修等工作。
[0041]
综上所述,虽然本发明已以优选实施例揭露如上,但上述优选实施例并非用以限制本发明,本领域的普通技术人员,在不脱离本发明的精神和范围内,均可作各种更动与润饰,因此本发明的保护范围以权利要求界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1