一种玻璃托架等离子处理系统的制作方法
1.本实用新型涉及玻璃生产设备领域,具体涉及一种玻璃托架等离子处理系统。
背景技术:
2.目前,现有的玻璃托架等离子处理速度慢,不能适应现有的工厂生产需要。
技术实现要素:
3.本实用新型的目的就是针对上述之不足,而提供一种玻璃托架等离子处理系统。
4.本实用新型它包括震动上料盘、工作台、夹送装置、等离子处理定位机构、中转定位机构、打胶定位机构、等离子处理装置、打胶装置和出件装置,
5.震动上料盘位于工作台一侧,
6.夹送装置包括夹送支架、气动滑台和一组夹持气缸,
7.夹送支架安装在工作台上,气动滑台安装在夹送支架顶部,气动滑台的滑块上设置有气缸安装板,夹持气缸的活塞杆端部设置有气动夹爪,一组夹持气缸依次排列安装在气缸安装板上,震动上料盘的出料端位于夹送装置一端下方,
8.等离子处理定位机构包括第一旋转气缸和第一托架放置板,第一旋转气缸通过气缸支架安装在工作台上,第一托架放置板的顶部对称分布设置有一对托架定位块,托架定位块上开有托架仿形插槽,第一托架放置板安装在第一旋转气缸顶部,
9.中转定位机构包括定位支架和第二托架放置板,定位支架安装在工作台上,第二托架放置板的顶部对称分布设置有一对托架定位块,托架定位块上开有托架仿形插槽,第二托架放置板安装在定位支架顶部,
10.打胶定位机构包括第二旋转气缸和第三托架放置板,第二旋转气缸通过气缸支架安装在工作台上,第三托架放置板顶部对称分布设置有一对托架定位块,托架定位块上开有托架仿形插槽,第三托架放置板安装在第二旋转气缸顶部,
11.中转定位机构位于等离子处理定位机构和打胶定位机构之间,
12.等离子处理装置包括第一三轴机器人和等离子枪,
13.第一三轴机器人安装在工作台上,等离子枪通过连接固定块安装在第一三轴机器人的安装板上,等离子处理装置位于等离子处理定位机构一侧,
14.打胶装置包括第二三轴机器人和打胶组件,第二三轴机器人安装在工作台上,打胶组件的打胶枪通过连接固定块安装在第二三轴机器人的安装板上,打胶装置位于打胶定位机构一侧,
15.出件装置安装在工作台上,出件装置的进料端位于夹送装置另一端下方。
16.第一三轴机器人和第二三轴机器人均由x轴向滑台、y轴向滑台和z轴向滑台组成。
17.打胶组件包括胶液盒、一级稳压器、二级定量齿轮泵和打胶枪,胶液盒上设置有供料泵,供料泵的出液口上设置有高压球阀,并通过高压管道与一级稳压器的进料口相连通,一级稳压器的出料口通过高压管道与二级定量齿轮泵的进料口相连通,二级定量齿轮泵的
出料口通过高压管道与打胶枪的进料口相连通,打胶枪内设置有胶阀。
18.出件装置包括链条安装座、固定链轮座、可调链轮座、链条和一对链条护板,
19.固定链轮座内设置有链轮,固定链轮座安装在链条安装座上,可调链轮座内设置有链轮,可调链轮座底部开有长圆形固定孔,并通过螺栓安装在链条安装座上,链条安装在固定链轮座和可调链轮座的链轮上,链条上等距依次排列设置有一组托架传送块,托架传送块的顶部开有托架仿形插槽,通过电动机驱动固定链轮座的链轮旋转,一对链条护板镜像分布安装在链条安装座上,链条位于一对链条护板之间。
20.它还有放置柜和震动上料盘放置桌,震动上料盘放置桌位于放置柜一侧,震动上料盘安装在震动上料盘放置桌顶部,工作台安装在放置柜内。
21.本实用新型优点是:工件搬运与等离子及打胶同步工作,不额外占用工作时间,减少工作节拍。
附图说明
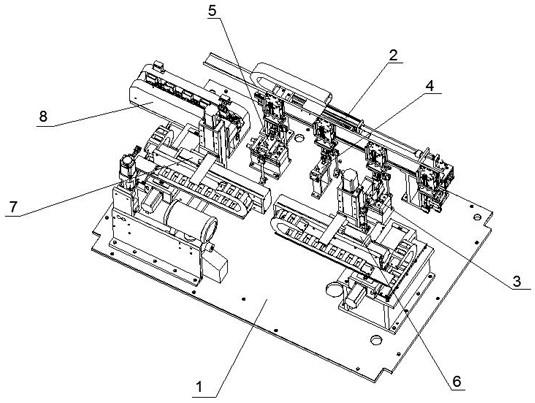
22.图1是本实用新型结构示意图。
23.图2是本实用新型夹送装置的结构示意图。
24.图3是本实用新型夹送装置的结构示意图。
25.图4是本实用新型等离子处理定位机构、中转定位机构和打胶定位机构的结构示意图。
26.图5是本实用新型等离子处理装置和打胶装置的结构示意图。
27.图6是本实用新型打胶组件的结构示意图。
28.图7是本实用新型出件装置的结构示意图。
29.图8是本实用新型出件装置的结构示意图。
30.图9是本实用新型结构示意图。
具体实施方式
31.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。在本发明实施例的描述中,需要说明的是,若出现术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,本发明的描述中若出现术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。在本发明实施例的描述中,还需要说明的是,除非另有明确
的规定和限定,若出现术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
32.如附图所示,本实用新型它包括震动上料盘、工作台1、夹送装置2、等离子处理定位机构3、中转定位机构4、打胶定位机构5、等离子处理装置6、打胶装置7和出件装置8,
33.震动上料盘位于工作台1一侧,
34.夹送装置2包括夹送支架9、气动滑台10和一组夹持气缸11,
35.夹送支架9安装在工作台1上,气动滑台10安装在夹送支架9顶部,气动滑台10的滑块上设置有气缸安装板12,夹持气缸11的活塞杆端部设置有气动夹爪,一组夹持气缸11依次排列安装在气缸安装板12上,震动上料盘的出料端位于夹送装置2一端下方,
36.等离子处理定位机构3包括第一旋转气缸13和第一托架放置板14,第一旋转气缸13通过气缸支架安装在工作台1上,第一托架放置板14的顶部对称分布设置有一对托架定位块,托架定位块上开有托架仿形插槽,第一托架放置板14安装在第一旋转气缸13顶部,
37.中转定位机构4包括定位支架15和第二托架放置板16,定位支架15安装在工作台1上,第二托架放置板16的顶部对称分布设置有一对托架定位块,托架定位块上开有托架仿形插槽,第二托架放置板16安装在定位支架15顶部,
38.打胶定位机构5包括第二旋转气缸17和第三托架放置板18,第二旋转气缸17通过气缸支架安装在工作台1上,第三托架放置板18顶部对称分布设置有一对托架定位块,托架定位块上开有托架仿形插槽,第三托架放置板18安装在第二旋转气缸17顶部,
39.中转定位机构4位于等离子处理定位机构3和打胶定位机构5之间,
40.等离子处理装置6包括第一三轴机器人19和等离子枪20,
41.第一三轴机器人19安装在工作台1上,等离子枪20通过连接固定块安装在第一三轴机器人19的安装板上,等离子处理装置6位于等离子处理定位机构3一侧,
42.打胶装置7包括第二三轴机器人21和打胶组件22,第二三轴机器人21安装在工作台1上,打胶组件22的打胶枪通过连接固定块安装在第二三轴机器人21的安装板上,打胶装置7位于打胶定位机构5一侧,
43.出件装置8安装在工作台1上,出件装置8的进料端位于夹送装置2另一端下方。
44.第一三轴机器人19和第二三轴机器人21均由x轴向滑台、y轴向滑台和z轴向滑台组成。
45.打胶组件22包括胶液盒23、一级稳压器24、二级定量齿轮泵25和打胶枪26,胶液盒23上设置有供料泵,供料泵的出液口上设置有高压球阀,并通过高压管道与一级稳压器24的进料口相连通,一级稳压器24的出料口通过高压管道与二级定量齿轮泵25的进料口相连通,二级定量齿轮泵25的出料口通过高压管道与打胶枪26的进料口相连通,打胶枪26内设置有胶阀。
46.出件装置8包括链条安装座27、固定链轮座28、可调链轮座29、链条30和一对链条护板31,
47.固定链轮座28内设置有链轮,固定链轮座28安装在链条安装座27上,可调链轮座29内设置有链轮,可调链轮座29底部开有长圆形固定孔,并通过螺栓安装在链条安装座27
上,链条30安装在固定链轮座28和可调链轮座29的链轮上,链条30上等距依次排列设置有一组托架传送块32,托架传送块32的顶部开有托架仿形插槽,通过电动机驱动固定链轮座28的链轮旋转,一对链条护板31镜像分布安装在链条安装座27上,链条30位于一对链条护板31之间。
48.它还有放置柜33和震动上料盘放置桌34,震动上料盘放置桌34位于放置柜33一侧,震动上料盘安装在震动上料盘放置桌34顶部,工作台1安装在放置柜33内。
49.工作方式及原理:工作人员将玻璃托架置入震动上料盘内,由振动盘自动上料,夹持气缸11的活塞杆伸出,由气动夹爪将玻璃托架夹住,夹持气缸11的活塞杆收回,提起玻璃托架,气动滑台10带动夹持气缸11移动至等离子处理定位机构3上方,并将玻璃托架插入第一托架放置板14的托架定位块内,启动第一旋转气缸13,带动玻璃托架旋转至等离子枪20下方,通过第一三轴机器人19带动等离子枪20下移对准玻璃托架进行等离子处理,处理完毕后等离子枪20回位,第一旋转气缸13回位,夹持气缸11通过气动夹爪将玻璃托架夹起,放入第二托架放置板16的托架定位块内。夹持气缸11通过气动夹爪将玻璃托架从第二托架放置板16的托架定位块内夹起,放入第三托架放置板18的托架定位块内,第二旋转气缸17带动玻璃托架旋转至打胶工位,第二三轴机器人21带动打胶组件22的打胶枪对玻璃托架进行打胶处理。打胶完毕后第二三轴机器人21复位,第二旋转气缸17复位,夹持气缸11通过气动夹爪将玻璃托架夹起,放入出件装置8的托架传送块32内,运送到操作者取件区域,操作者取走工件,设备自动继续工作。整个工作流程中,工件搬运与等离子及打胶同步工作,不额外占用工作时间,减少工作节拍。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1