一种基于多级矢量涵道风扇的飞车的制作方法
[0001]
本发明属于无翼飞车技术领域,尤其涉及一种基于多级矢量涵道风扇的飞车。
背景技术:
[0002]
无翼垂直起降飞车是具有革命性的划时代的飞行器。无翼垂直起降飞行器是飞行过程由自主飞行的无人飞行器和有人工操控飞行的载人飞行器。具备全自动、全日制可运行的垂直起降和飞行能力的无翼飞行器将开启一个人类运输工具的新纪元。无翼飞车可以在地面道路上运行,主要功能是在中低空作飞行。
[0003]
无翼垂直起降飞车用于民用需求包括快速、无需起降跑道的短程人员和货物运输、城际航班和飞行出租车;应急救援:难以接近地区,高山,海洋,岛屿,湖泽地区;战场,火场,污染,疫情爆发传布地区;地震灾区,洪灾地区,海难;森林防火,林区火情预警巡监;各种长程管线巡监(可以载器材停机检修或悬定检察);私家车;公路管理維稳防恐,快速响应和区域巡监;
[0004]
无翼垂直起降飞车用于军用需求,包括小型突击飞车兼具低空和贴地高速飞行性能,任务载重可达到25-30%飞车最大飞行重量、陆上突击作战、边海防作战、狙击和特种作战、两栖作战、海上作战中将起、特殊重要的作用。飞车结合了陆军作战的坦克、步兵战车直升机的优点,承担多种功能任务。大幅度提高了合成化和立体化;对地攻击时,目标小、隐蔽性好和灵敏机动的飞车具备陆航的直升机和战车的共同功能。
[0005]
国外研究状况:西方和日本汽车工业十分热衷于城市“空中出租车”,多数仍采用大型“单级涵道螺旋桨”方案。日本一个飞行出租车,上部带有前后2个一共4个单级2.8米直径螺旋桨,高度达3米左右的庞然大物;或者是在车的顶部雨伞状大面积架设多个螺旋桨。
[0006]
国内研究状况:国内的热情主要投入可在地上跑的直升机飞车和部分汽车公司的折迭翼“飞行汽车”。这种垂直起降飞机的技术门槛较低,因此开发单位从大量的小型民用公司到部份国家科研企业遍布大江南北,风起云涌。但是国内这些“飞行汽车”,由于受到大直径低转速升力螺旋桨、大能耗、相对大的传动机构和结构的重量抑制,前景难以预计。
[0007]
综上国外、国内存在的共同问题为:都是采用“蘑菇状”的“增大螺旋桨的面积”解决飞车“飞起来”的问题,假如车身的宽度为2米,其车身顶部的“蘑菇状”组合螺旋桨的直径为车身宽度的3-4倍宽度,如此庞然大物的飞车,必然是大能耗、和相对大的传动机构、以及相对大的重量,前景难以预计。
技术实现要素:
[0008]
本发明为解决现有技术存在的问题,提出一种基于多级矢量涵道风扇的飞车,目的在于通过采用多级矢量涵道风扇的飞车,解决无翼飞车的小型化、低能耗、轻结构、低成本问题。
[0009]
本发明为解决其技术问题提出以下技术方案
[0010]
一种基于多级矢量涵道风扇的飞车,该飞车为无翼垂直起降的飞车:设有上层和
下层,飞车下层周边安装有若干矢量涵道风扇、用于形成飞车的举力、控制力的矢量涵道风扇飞行动力组件;飞车下层中部安装有动力系统、以及传感器组和中央处理器;飞车下层靠近前端和后端的矢量涵道风扇处还带有地面运行和着陆时的车轮,包括一个前转向轮和两个后驱动轮;飞车上层前端靠近前转向轮处设有双驾驶座、双驾驶座的后面设有货仓;所述若干矢量涵道风扇,每个矢量涵道风扇都是独立可控的,由中央处理器控制每个矢量涵道风扇的动力功率和矢量栅板的开启角度,达到优化的自动平衡的飞行航路和油耗。
[0011]
所述矢量涵道风扇飞行动力组件是利用矢量涵道风扇向下产生排出气流,通过角度调节栅板,偏转高速排出气流方向,产生沿涵道轴向和横向推力的动力装置;每套多级矢量涵道风扇是独立可控角度转向动力装置,可变喷气方向。
[0012]
所述若干矢量涵道风扇,可由多个单级或多个多级矢量风扇组成动力组,沿涵道轴线串连排列形成一个高效、高速、高载荷输出的喷气动力系统。
[0013]
所述多级矢量涵道风扇包括带有可调节定片机构的多级矢量涵道风扇:上下两级风扇转子之间设有定子叶片角度调整机构、以及转动圆环调节定片角度机构,该转动圆环调节定片角度机构带动定子叶片角度调整机构实现对每级风扇的定子叶片进行微量偏转角度调节。
[0014]
所述飞车下层中部安装的动力系统包括机载电池组、带有直流电动机的动力舱、燃料仓;该机载电池组用于飞车在地面运行时使用机载电池组的电能来驱动飞车在地面运行;该直流电动机用于飞车的二个后驱动轮。
[0015]
所述飞车尾部的下层设有后设备舱、尾部的上层设有后燃料仓。
[0016]
本发明的优点效果
[0017]
1.本发明克服了传统的偏见,巧妙地利用车身的空间,实现了飞车为无翼垂直起降的飞车:合理地将车身分为上层、下层、周边、中部、尾部,在下层的周边布设多个矢量涵道风扇和车轮;在下层的中部设置动力系统和中央处理器;将上层的前部作为驾驶室,上层的中部作为货舱,在车的尾部安装后燃料仓、后设备舱,通过以上一系列设置,使得飞车各部分布局紧凑,充分利用空间,有效解决了小型化、低能耗、轻结构、低成本问题。
[0018]
2.本发明将飞车上层、下层、周边、中部、尾部各个部分有机结合,且相互支持、相互依赖,取得了小型化、低能耗、轻结构、低成本的突出的实质性特点和显著进步。
附图说明
[0019]
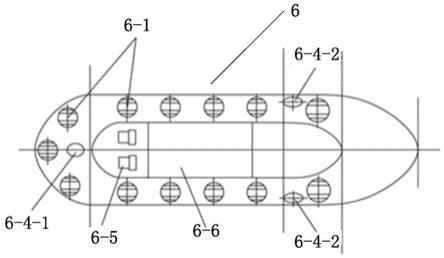
图1为本发明飞车俯视图;
[0020]
图2为本发明飞车主视图;
[0021]
图3a为方向可转动矢量控制气动舵涵道风扇原理图;
[0022]
图3b为单级矢量气动舵深涵道风扇原理图;
[0023]
图3c为多级矢量气动舵深涵道风扇原理图;
[0024]
图4为本发明带有定子叶片可调整机构的多级涵道风扇示意图;
[0025]
图4-1为可偏转定子叶片示意图;
[0026]
图4-2为转动园环调节定片角度机构示意图;
[0027]
图4-3转动园环调节定片角度机构示意图;
[0028][0029]
图5a为第一级风扇加速后出口实际气流方向示意图;
[0030]
图5b为第一级风扇加速后出口实际推力方向示意图;
[0031]
图5c为经过定子叶片折射气流后以某个α角度进入第二级风扇示意图;
[0032]
图5d为第二级风扇气流的旋转能基本为0示意图;
[0033]
图中:1:定子叶片角度调整机构;1-1:涵道圆筒;1-2:中心支撑架; 1-3:可偏转定子叶片;1-4:叶片转轴;2:转动圆环调节定片角度机构;2-1:可转动圆环;2-1-1:推拉连杆;2-1-2:推拉作动筒;2-2:偏转摇把;3:电驱动。6:飞车;6-1:多级矢量涵道风扇;6-2-1:机载电池组;6-2-2:动力舱; 6-2-3:前燃料舱;6-4-1:前转向轮;6-4-2:主驱动轮;6-5-1:前设备舵;6-6:货舱;
具体实施方式
[0034]
本发明设计原理
[0035]
1、多级矢量涵道风扇技术
[0036]
矢量涵道风扇动力系统是利用涵道风扇向下产生排出气流,通过调节栅板角度,偏转高速排出气流方向,产生沿涵道轴向和横向推力的动力装置。涵道中的风扇由一个(单级)或多个(多级)风扇组成,沿涵道轴线串连排列形成一个高效、高载荷输出的喷气动力系统。
[0037]
利用一个或多个单级/多级矢量涵道风扇单元组,作为垂直起降飞行器的起降、巡航飞行、机动飞行动力或其它辅助动力,也可以作为地面运行的动力。
[0038]
地面运行时飞车的动力是电动车,附加一套轮轴电机驱动飞车,电源来自机载电池组或单级/多级矢量涵道风扇单元组。
[0039]
多级矢量涵道风扇动力技术的典型应用有垂直起降的其它有翼/无翼飞行器,载人飞车等。本发明是在已研发成功的单级矢量浅涵道风扇,以及利用油-电混合动力发电系统研制的90千克级飞碟基础上,描述大推力多级矢量涵道风扇,和基于此动力的军民两用突击飞车。
[0040]
2.各级风扇独立控制原理。
[0041]
多级矢量涵道风扇中所有风扇都是电动并独立控制的、所有风扇转子间的定子叶片也是电驱动的、独立控制的。有了这个特性矢量涵道风扇才有可能做到真正的优化运行。
[0042]
3、设计定子叶片角度可调节、优化矢量涵道风扇特性
[0043]
⑴
旋转风扇出口的横向力对于涵道风扇是不利的。设计定子叶片角度可调节的缘由是因为旋转风扇出口会产生横向力。如图5a所示,一个单位气流 a
进
在风扇前速度为v
进
,经风扇叶面推进的气体加速为v
出
,v
出
的方向从左上向右下倾斜,同时产生一个从左上向右下的推力f
推
,f
推
如图5b所示,这里由f
推
产生f
横
,使得原来没有旋转的气体有了旋转动能,这对于涵道风扇是不利的,消耗了能量但没有产生举力。同时影响下一个风扇的工作环。
[0044]
⑵
设计风向经过定子叶片的偏转角度、使得进入第二级风扇的风向基本向下
[0045]
如图5c所示,第一级转子叶片产生水平向右的速度或者推力,经过可移动角度的定子叶片后,在定子叶片气流出口处形成水平方向反方向的速度v2或者推力,因此,定子叶片出口的速度和推力基本向下,但仍然存在一个水平向左的分力。
[0046]
⑶
设计定子叶片进入第二级风扇的横向分力和第二级风扇加速后自身横向分力,二者方向相反、相互抵消。如图5d所示,右下角存在2个力,一个是v
2进
,一个是v
2加
,这2个力倾斜方向相反,从定子进入第二级风扇的气流方向v
2进
为从右上向左下的方向,产生一个倾斜α角度,理想情况下,设计这个α角度的倾斜角度与第二级风扇被加速以后出口气流α’的倾斜角度大小相等方向相反,当v
2进
的横向矢量接近或相同于气流在第二级风扇被加速的横分量v
2横
时,气流的旋转能基本为0时,此时,气流被加速的动能是最接近理想最大值,效率为最高。表现为气体在第二级风扇加速后基本垂直向下,再经过第二级风扇出口处矢量栅板决定最终喷射方向,气体在整个流动加速过程中会有损失,但总体压力恢复系统很高,当设计好时,效率达到95%以上的能量利用。
[0047]
当飞行器在飞行中由于速度、机动发生变化时,对涵道风扇系统进行调节以满足飞行需求。这时的涵道风扇就会在功率转速、气流的流量、速度都发生变化,因此在整个涵道内的流场要重新进行调整。此时的定子叶片的调节功能就是优化气流流场的有效手段,以达到涵道风扇上下二级风扇的功能为最优。
[0048]
⑷
二级涵道风扇的上下二级风扇转动方向是同向的,也可以是反向的。以上我们仅描述了同向转动二个风扇间的定子的调节功能;本发明涵道风扇以二级为例示意定子叶片角度调节功能。对于多级风扇的涵道风扇是相同的,只是设计和计算模型更为复杂。
[0049]
基于以上原理,本发明设计了一种基于多级涵道风扇的飞车。
[0050]
一种基于多级矢量涵道风扇的飞车如图1、图2所示,其特征在于:该飞车为无翼垂直起降的飞车:设有上层和下层,飞车下层周边安装有若干矢量涵道风扇6-1、用于形成飞车的举力、控制力的矢量涵道风扇飞行动力组件;飞车下层中部安装有动力系统、以及传感器组和中央处理器6-3;飞车下层靠近前端和后端的矢量涵道风扇6-1处还带有地面运行和着陆时的车轮6-4-1、 6-4-2,包括一个前转向轮6-4-1和两个后驱动轮6-4-2;飞车上层前端靠近前转向轮处设有双驾驶座6-5、双驾驶座6-5的后面设有货仓6-6;所述若干矢量涵道风扇6-1,每个矢量涵道风扇都是独立可控的,由中央处理器控制每个矢量涵道风扇的动力功率和矢量栅板的开启角度,达到优化的自动平衡的飞行航路和油耗。
[0051]
所述矢量涵道风扇飞行动力组件是利用矢量涵道风扇向下产生排出气流,通过角度调节栅板,偏转高速排出气流方向,产生沿涵道轴向和横向推力的动力装置;每套多级矢量涵道风扇是独立可控角度转向动力装置,可变喷气方向。
[0052]
所述若干矢量涵道风扇6-1,可由多个单级或多个多级矢量风扇组成动力组,沿涵道轴线串连排列形成一个高效、高速、高载荷输出的喷气动力系统。
[0053]
所述多级矢量涵道风扇如图4所示,包括带有定子叶片可调整角度的多级矢量涵道风扇如图4、图4-1所示:上下两级风扇转子之间设有定子叶片角度调整机构1、以及转动圆环调节定片角度机构2,该转动圆环调节定片角度机构2带动定子叶片角度调整机构1实现对每级风扇的定子叶片进行微量偏转角度调节。
[0054]
补充说明:
[0055]
所述定子叶片角度调整机构1如图4-1所示,包括涵道圆筒1-1、涵道圆筒中心处的中心支撑架1-2、中心支撑架1-2和涵道圆筒1-1之间放射状布设的多个可偏转定子叶片1-3、每个可偏转定子叶片1-3小半径端头和大半径端头分别布设用于连接中心支撑架1-2和涵道圆筒内壁的叶片转轴1-4、靠近涵道圆筒内壁的每个叶片转轴1-4与转动圆环调节定片
角度机构2相连接。
[0056]
所述每个可偏转定子叶片如图4-3所示,小半径端头和大半径端头分别布设用于连接中心支撑架1-2和涵道圆筒内壁的叶片转轴1-4,具体为:中心支撑架1-2与可偏转叶片1-3连接的一端、以及涵道圆筒1-1内壁与可偏转叶片 1-3连接的一端均设有轴承1-5、1-6;可偏转叶片1-3分别通过布设在小半径端和大半径端的连接片1-6将各自的叶片转轴1-4固定其中、再将各自的叶片转轴1-4与中心支撑架1-2的轴承、涵道圆筒1-1内壁的轴承连接。
[0057]
所述转动圆环调节定片角度机构2如图4-1所示,具体为:该转动圆环调节定片角度机构设有可转动圆环2-1、以及可转动圆环2-1上多个对应每个可偏转叶片的偏转摇把2-2;所述可转动圆环2-1布设在涵道圆筒1-1靠近筒壁底端的外表面、所述偏转摇把2-2一端连接可转动圆环2-1、一端连接伸出涵道筒壁以外的叶片转轴1-4。
[0058]
如图4-2所示,所述可转动圆环2-1还包括两段肘接的推拉连杆2-1-1和推拉作动筒2-1-2,由电驱动3推拉作动筒2-1-2,再通过推拉作动筒2-1-2推动可转动圆环2-1转动。
[0059]
如图2所示,所述飞车6下层中部安装的动力系统包括机载电池组6-2-1、带有直流电动机的动力舱6-2-2、前燃料仓6-2-3;该机载电池组6-2-1用于飞车在地面运行时使用机载电池组6-2-1的电能来驱动飞车6在地面运行;该直流电动机用于飞车的二个后驱动轮6-4-2。所述飞车6尾部的下层设有后设备舱6-2-5、尾部的上层设有后燃料仓6-2-4。
[0060]
实施例一:bdm-fc01-自动车
[0061]
一、性能指标
[0062]
最大运行重量:450-550公斤;
[0063]
最佳载重:100公斤-120公斤(二名乘员);
[0064]
最大飞行航程:300-350公里;
[0065]
最大飞行速度:150公里/时;
[0066]
经济巡航速度:100-120公里/时;
[0067]
最大航时:2-2.5小时
[0068]
垂直起降和悬停高度:0-3000米。
[0069]
二、动力系统
[0070]
煤油发动机rotay-915(带增压器),三相发电机电功率:110-120千瓦;
[0071]
12台独立可控双风扇矢量涵道风扇,52公斤/台举力;
[0072]“非可控式自平衡飞行”和悬停动力控制系统。
[0073]
三、设备配置
[0074]
全自动飞控驾驶系统(双通道)
[0075]
人工飞控驾驶系统(自动警告和禁止系统)
[0076]
4功能光电吊舱一具;
[0077]
全景雷达一部(包括下视雷达);
[0078]
防撞和报警系统;
[0079]
应急自动着陆系统(包括油量报警应急处理);
[0080]
飞行路线和地图自动生成系统一套,地形显示器一台;
[0081]
应急自动驾驶仪和通讯电台一部;
[0082]
全自动北斗或gps座标指示系统的人工飞行辅助导航系统;
[0083]
无线电高度仪,气压高度仪和激光高度仪;
[0084]
速度指示表,包括空速指示,地速指示。
[0085]
实施例二:bdm-fc01-自动车
[0086]
一、性能指标
[0087]
最大运行重量:5000-5500公斤;
[0088]
最佳载重:1000公斤-1200公斤;
[0089]
最大飞行航程:300-400公里;
[0090]
最大飞行速度:160公里/时;
[0091]
经济巡航速度:100-120公里/时;
[0092]
最大航时:2.5-3小时
[0093]
垂直起降和悬停高度:0-3000米;
[0094]
二、动力系统
[0095]
航空涡轴发动机一台1250千瓦(直9),三相发电机电功率:1200千瓦;
[0096]
12台独立可控双风扇矢量涵道风扇,500公斤/台举力;
[0097]
非可控制式自平衡飞行和悬停动力控制系统;
[0098]
三、飞控系统
[0099]
全自动“不可控制自平衡系统”和飞行航路可改变控制系统;
[0100]
gps或北斗导航和惯性导航仪;
[0101]
安装有加速度仪,飞行姿态仪和警告系统;
[0102]
飞控系统通过无线电显示于地面控制站;
[0103]
调试阶段,安装有地面飞行控制雷达站;
[0104]
四、设备配置
[0105]
全自动飞控驾驶系统(双通道)
[0106]
人工飞控驾驶系统(自动警告和禁止系统)
[0107]
4功能光电吊舱四具;
[0108]
全景雷达一部(包括下视雷达);
[0109]
防撞和禁止报警系统;
[0110]
应急自动着陆系统(包括油量报警应急处理);
[0111]
飞行路线和地图自动生成系统一套,地形显示器一台;
[0112]
应急自动驾驶仪和通讯电台一部;
[0113]
全自动北斗或gps地标指示系统的人工飞行辅助导航系统;
[0114]
无线电高度仪,气压高度仪和激光高度仪;
[0115]
速度指示表,包括空速指示,地速指示;
[0116]
图传和数据系统(100-200公里有效范围);
[0117]
海上飞行海况测量系统,包括风速、湿度、浪高等即时数据;
[0118]
定高飞行和地形跟踪系统;
[0119]
海事卫星通讯模块;
[0120]
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围;应当指出,对于本技术领域
的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1