一种车辆维保平台的制作方法
1.本发明涉及车辆维保装置,具体是一种车辆维保平台。
背景技术:
2.现有的地沟用于停放带维保的车辆,车辆在维保时,会出现如下几个问题:
3.1、需要将车辆停放至地沟上,再通过举升机将车辆抬起进行维保,在常规的维保车辆过程中,势必会有污渍停留在地沟上,影响整个维修平台的清洁或者对正在维修的车辆进行污染;
4.如何保持地沟表面的清洁成为了本公司研究人员急需解决的问题。
5.2、常规的地沟中,动力分布不集中,造成了动力箱占地面积大,无法集中进行检修;
6.如何将地沟与动力装置集成在一起。
7.3、对车辆进行维保时,人们无法直接对车辆高处的玻璃进行更换检修清理,或者对车辆的顶部进行空调检修,需要借助固定凳来实现,操作麻烦;
8.如何在车辆进行维保时,实现对车辆两侧的升降平台高度可调。
9.4、车轮胎拆装是通过人工使用气动螺栓枪将车辆上的螺栓进行拆除,从而实现轮胎的更换;或通过人工使用气动螺栓枪将螺栓安装进螺栓孔内,实现轮胎的安装;由于公交车轮胎上的螺栓数量多,通过人工的方式耗时耗力,且效率低下、有安全隐患;
10.如何实现公交车轮胎的自动化拆装。
11.综上,如何能够设计出新型车辆维保平台成为了本公司研究人员急需解决的问题。
技术实现要素:
12.本发明要解决的技术问题是:如何能够设计出新型车辆维保平台;
13.为了解决上述技术问题,本发明采用如下技术方案:
14.本发明是一种车辆维保平台,包括:地沟,其适于停放维保车辆;承载协作机器人,其适于将地沟与动力装置集成在一起,以及保持地沟清洁;维保协作机器人,其位于车辆两侧,并适于对车辆的不同高度进行维修或保养;轮胎拆装协作机器人,其位于车辆两侧,并适于对车辆的轮胎进行拆卸或安装;
15.通过承载协作机器人能够将地沟与动力装置集成在一起以及保持地沟清洁;通过维保协作机器人能够实现对车辆的不同高度进行维修或保养的功能,通过轮胎拆装协作机器人能够实现车辆的轮胎进行拆卸或安装。
16.为了说明承载协作机器人具体机构,本发明采用承载协作机器人包括:
17.排污系统,其适于将地沟表面的污渍导流至地沟内底部,随后再沿地沟长度方向排出至地沟外;
18.在本方案中,在原有地沟的基础上增加排污系统,排污系统是通过水流对地沟表
面进行清洗,随后将污渍冲刷至地沟底部,再将污渍从地沟底部排出。
19.为了说明地沟的具体结构,本发明地沟内还设置有新风系统,其适于保持所述地沟内空气新鲜;废机油箱,其通过废机油管连接车辆;照明装置,其适于照亮地沟内部;第一格栅板,其设置在地沟底部,便于人的行走或物的放置;轨道,其沿所述地沟长度方向设置在地沟内,并适于供举升机运动;
20.第一格栅板底部就是螺旋输送机,第一格栅板上的污渍能够直接掉落至排污槽内,轨道的设置是为了供举升机进行平移运动。
21.为了具体说明排污系统的具体结构,本发明采用排污系统包括:第二格栅板,其铺设在地沟上端面两侧;导流板,其设置在第二格栅板下部;排污槽,其沿地沟长度方向开设在地沟内底部;导流壁,其适于将导流板的污渍运输至排污槽内;螺旋输送机,其转动设置在排污槽内;
22.在本方案中,第二格栅板的作用既能实现水流、污渍的穿过,又能防止零件落入地沟内部;第二格栅板和导流板呈上下堆叠设置,第二格栅板起到过滤作用,导流板能够将水流汇聚且定向流动;导流壁起到导向作用,水流以及污渍会在导流壁的引流下流入至排污槽内,排污槽内设置有螺旋输送机,通过螺旋输送机桨叶的转动,将污渍排出至地沟外。
23.为了说明导流壁的具体结构,本发明采用导流壁包括竖直设置的立壁,以及倾斜向下设置的倾斜壁;污渍经立壁上开设的通孔流至倾斜壁上,经倾斜壁导流至排污槽内;
24.在本方案中,立壁能够起到支撑作用,污渍经通孔穿过立壁,随后再经倾斜壁的导流流入至排污槽内;倾斜壁为倾斜设置,污渍能够在其重力的作用下自动流入至排污槽内。
25.为了说明导流板的具体结构,本发明采用导流板包括板体,以及间隔凸出设置在板体上多个筋条;其中,筋条的长度方向垂直于地沟的长度方向;
26.在本方案中,污渍和水流会经两两筋条的间隙处导流至立壁上开设的通孔处。
27.为了方便人与物进入地沟内,本发明采用位于地沟入口处设置有沿地沟高度方向升降的升降单元;伸缩梯,其一端与所述地沟底部连接,一端与所述升降单元连接;警示板,其竖直设置在升降单元上;
28.升降单元、支撑板、警示板同步上下运动,警示板处于升降单元的高位时,将其端面露出地沟外,提醒操作人员禁止进入。
29.在车辆进入地沟前,地沟前端上还设置有扫描车牌的装置,从而获取车辆的轴距信息,从而能够驱动举升机平移至相应位置后抬起车辆。
30.为了便于将车辆抬起,本发明还设置有举升机,其适于沿所述地沟长度方向移动后,抬起车辆;当车辆停放在地沟上时,举升机将车辆抬起,便于对车辆底部的电机或者变速箱或轮胎进行维修和更换。
31.常规的地沟活动部件的动力单元都是分散在基座外的,这就导致整体装置集成度低,进而导致占地面积大;此外散装的动力设备搬运困难,且动力单元复杂;综上,如何实现整体装置集成度高,节约占地面积,本发明采用地沟的前或后端面设置有动力总成箱;动力总成箱适于控制举升机的前后运动、螺旋输送机的转动及其升降单元的升降;
32.在本方案中,将螺旋输送机、举升机前后移动、升降单元升降的动力单元都安装在动力总成箱内,从而实现整体装置集成度高,占地面积小。
33.为了说明动力总成箱具体结构,本发明采用动力总成箱包括:壳体;电机,其输出
端通过减速器分别连接第一离合器、第二离合器、第三离合器;第一离合器适于控制举升机的前后运动;第二离合器通过齿轮传动适于控制螺旋输送机的转动;第三离合器经同步带控制丝杆螺母沿丝杆做升降运动,其中丝杆螺母与升降单元固定连接;
34.也就是说,在动力总成箱内只设置有一个电机,通过与第一离合器或第二离合器或第三离合器的配合,将动力传递至举升机或螺旋输送机或升降单元上;进而,在本动力总成箱中,只能控制一个部件的运动,其他两部件处于不工作状态。
35.在原有地沟的基础上增加排污系统,排污系统是通过水流对地沟表面、地沟内进行清洗,随后将污渍冲刷至地沟底部,再将污渍从地沟底部排出,从而保持地沟表面、底部的清洁;此外,在本方案中,将螺旋输送机、举升机前后移动、升降单元升降的动力单元都安装在动力总成箱内,从而实现整体装置集成度高,占地面积小,检修方便;此外,在本装置中还设置有新风系统、轨道、废机油管、照明装置、第一格栅板,给地沟内的操作人员提供了舒适、便捷的条件。
36.为了说明维保协作机器人的具体结构,本发明采用维保协作机器人包括侧向升降平台,其位于地沟及车辆两侧;容置腔,其开设在地沟上端面,并适于放置侧向升降平台;驱动机构,其对称设置在侧向升降平台两侧,并适于驱动侧向升降平台升降;伸缩梯,其一端与容置腔底部连接,另一端与侧向升降平台连接;当驱动机构驱动侧向升降平台上升时,伸缩梯处于展开状态。
37.在本方案中,侧向升降平台由驱动机构控制升降,侧向升降平台在不工作时放置在容置腔内,此时侧向升降平台的上端面与地沟的上端面齐平;在侧向升降平台的两侧设置有伸缩梯,伸缩梯与侧向升降平台的升降同步处于展开或者回收状态,侧向升降平台上放置有物品或站立操作人员,物品或人员可跟随侧向升降平台上下运动,伸缩梯的设置也是便于操作人员从地沟处斜向上至侧向升降平台上或从升降平台上斜向下至地沟上;此外,当侧向升降平台处于不工作状态时,侧向升降平台的上端面与地沟齐平,便于操作人员、车、物品的运动。
38.为了说明驱动机构的具体结构,本发明采用驱动机构包括:翻转臂,其一端与容置腔底部铰接,另一端活动设置在侧向升降平台底部的滑槽内;从动臂,其一端与容置腔底部铰接,从动臂的臂身上设置有连接件,连接件与翻转臂的臂身连接;液压缸,其一端与地沟铰接,其活塞杆端部与从动臂的另一端铰接;当液压缸的活塞杆伸出时,带动从动臂转动,并在连接件的带动下,翻转臂跟随从动臂发生转动,翻转臂的端部在滑槽内向滑槽的外侧运动,侧向升降平台上升;
39.在本方案中,在侧向升降平台两侧对称设置有驱动机构,也就是说,升降平台升降需要两驱动机构,每一驱动机构包括从动臂、翻转臂、液压缸、连接件;液压缸与从动臂连接,翻转臂与侧向升降平台连接,从动臂与翻转臂之间通过连接件连接;液压缸作为动力来源依次将动力传递给从动臂、连接件、翻转臂、侧向升降平台,最终实现侧向升降平台的升降。
40.为了说明伸缩梯的具体结构,本发明采用伸缩梯包括:平行设置的伸缩段以及连接两伸缩段的多个等边三角形阶梯;每一伸缩段包括多个伸缩节;每一伸缩节包括插入段,以及供另一伸缩节的插入段插入的空腔段;等边三角形阶梯顶点处与伸缩节铰接。
41.伸缩段包括多个伸缩节,其中一伸缩节的插入段可插入另一伸缩节的空腔段,也
就是说,伸缩段由于伸缩节的结构可实现伸缩,等边三角形阶梯的其中两顶点分别铰接在伸缩节上,伸缩节伸缩的过程中,等边三角形阶梯只进行升降运动,从而实现等边三角形阶梯的其中一边始终处于水平状态,便于工作人员的脚踏。
42.此外,为了便于搬运车辆底部的电池,本发明采用侧向升降平台上通过剪叉装置设置有可升降的第二升降平台;第二升降平台可上升至与侧向升降平台齐平;当第二升降平台下降至低位时,第二升降平台上放置有取电池的小车,小车顶面与侧向升降平台齐平;
43.在本方案中,升降平台内还通过剪叉装置设置有可升降的第二升降平台;第二升降平台下降,与升降平台形成一容纳小车的腔室;
44.当电池从车辆底部侧边抽出之前,第二升降平台上升,此时第二升降平台顶面与升降平台的顶面齐平,此时将电池置于小车上,随后将小车推走,完成电池的拆卸,反之实现电池的安装。
45.在原有地沟的基础上增加侧向升降平台,操作人员站在侧向升降平台上,实现了在车辆进行维保时,对车辆高处物体进行维修或更换;通过设置与升降平台同步运动的伸缩梯,便于操作人员从地沟处斜向上至侧向升降平台上或从升降平台上斜向下至地沟上,实现对车辆两侧的升降平台高度可调以及物品不用来回搬运、提升。
46.为了说明轮胎拆装协作机器人的具体结构,本发明采用轮胎拆装协作机器人包括定位组件,其包括圆周布置的多个套筒连接轴;当定位组件绕其轴向方向自转,将套筒连接轴对应相应轮胎螺栓后,通过平移组件将套筒连接轴头部与轮胎螺栓配合,或将轮胎螺栓安装在所述套筒连接轴上,将所述定位组件水平旋转对准轮胎上的螺栓孔;驱动组件,其适于插入至少一个套筒连接轴尾部,并驱动套筒连接轴同步转动;抱臂组件,其适于旋转后抱紧轮胎,限制轮胎转动;底座,其适于将定位组件处于收纳状态,或将轮胎的圆心与定位组件的圆心处于水平同轴状态;
47.在本方案中,当需要拆卸轮胎时,通过底座的运动,将定位组件中心与轮胎的中心处于同一水平线上,抱臂组件抱紧轮胎,从而限制轮胎的转动;定位组件可发生旋转,将套筒连接轴一一对应相应螺栓后,通过平移组件将套筒连接轴与螺栓一一配合进行定位;驱动组件可与套筒连接轴尾部配合,从而驱动套筒连接轴转动,将螺栓从轮胎上进行拆卸;
48.当轮胎需要安装时,将轮胎夹紧在抱臂组件上,通过底座的运动,将轮胎的轴线与轮胎转轴的轴线处于共线状态,轮胎螺栓安装在套筒连接轴上,将定位组件水平旋转对准轮胎上的螺栓孔,通过平移组件将轮胎螺栓装进螺栓孔内,通过驱动组件的转动,将螺栓旋进螺栓孔内。
49.为了说明底座的具体结构,本发明采用底座包括:水平旋转机构,其由第一动力机构控制,驱动其输出端水平旋转;第一竖直旋转机构,其与水平旋转机构的输出端连接,并由第二动力机构控制,驱动其输出端竖直摆动;第二竖直旋转机构,其与第一竖直旋转机构的输出端连接,并由第三动力机构控制,驱动输出端竖直摆动;
50.通过底座实现三种运动,水平旋转机构对应的是水平面上的转动;第一竖直旋转机构、第二竖直旋转机构对应的是竖直面上的转动;分别由第一、二、三动力机构对应控制;
51.水平旋转机能够将整体的拆胎机构正面或者侧面朝向轮胎;第一竖直旋转机构、第二竖直旋转机构能够将定位组件对准轮胎的中心,也就是说,第一竖直旋转机构、第二竖直旋转机构在竖直面上能够实现两轴的运动。
52.为了说明平移组件的具体结构,本发明采用平移组件包括:尾端壳体;直线模组,其由第四动力机构控制,驱动尾端壳体相对于底座的直线运动;
53.尾端壳体与定位组件连接,尾端壳体的运动直线运动从而实现定位组件的直线运动;直线模组与底座连接,具体说,直线模组与第三动力机构控制的输出端平面连接。
54.为了说明直线模组的具体结构,本发明采用直线模组包括:滑轨,其对称设置在尾端壳体底部;滑轮组,其对称转动设置在底座顶面,并作用于滑轨两侧;支板,其竖直设置在底座顶面,并穿过尾端壳体;滑轮,其转动设置在支板端部,并作用于滑轨上端面;主动轮,其与第四动力机构输出端连接,并作用于其中一滑轨内侧面;
55.滑轮组夹紧滑轨两侧,支板竖直设置,并与滑轮配合,限制尾端壳体在运动过程中发生翘起现象,始终保持尾端壳体处于水平运动状态,第四动力机构作为动力源,驱动滑轨的移动,从而实现尾端壳体相对于底座的运动。
56.为了说明定位组件的具体结构,本发明采用定位组件包括:前端壳体,其由第五动力机构控制转动;第一安装板,其固定设置在前端壳体内;多个套筒连接轴,其呈圆周设置在第一安装板上;
57.前端壳体的转动由第五动力机构控制实现转动,从而带动第一安装板上的多个套筒连接轴旋转后对准轮胎螺栓,在上述平移组件的带动下,将套筒连接轴与螺栓实现插接配合。
58.为了说明第五动力机构是如何控制前端壳体的转动,本发明采用前端壳体后端穿过轴承并固定有第一齿圈;轴承的外圈与前端壳体固定连接,轴承的内圈连接有底板;底板上安装有第五动力机构;第五动力机构的输出端穿过底板,并与第一齿圈的内圈啮合;
59.前端壳体的端部固定有第一齿圈,且穿过轴承,轴承的内圈与底板固定连接,轴承外圈与前端壳体固定连接,底板上设置有与第一齿圈啮合的第五动力机构,第五动力机构转动,将动力依次传递给第一齿圈、前端壳体,实现前端壳体的转动;为了进一步实现转动的稳定性,前端壳体还与轴承外圈连接,也就是说,第五动力机构转动,轴承的外圈也发生转动。
60.为了说明驱动组件的具体结构,本发明采用驱动组件包括:第二安装板,其由第六动力机构驱动转动;转动轴,其由第七动力机构控制驱动自转;当第六动力机构驱动第二安装板转动,将转动轴与套筒连接轴处于同一直线上时,切换气缸驱动第二安装板前行,并将转动轴的头部与套筒连接轴尾部配合,第七动力机构控制转动轴转动,并带动套筒连接轴转动;
61.驱动组件由三种运动方式,分别是:1、第六动力机构驱动第二安装板的转动;2、第七动力机构驱动转动轴的转动;3、切换气缸实现第二安装的前后运动。
62.为了说明第六动力机构如何驱动第二安装板的转动,本发明采用第二安装板具有一输入轴;输入轴上套定有第二齿圈;底板,其上安装有第六动力机构;第六动力机构的输出端与第二齿圈啮合,并驱动第二齿圈转动;
63.底板为上述定位组件提及的底板,第六动力机构输出的转动力依次传递给第二齿圈,输入轴,从而实现第二安装板的转动。
64.为了说明第七动力机构如何驱动转动轴的转动,本发明采用输入轴上活动套设有第三齿圈;转动轴上套定有第四齿圈;底板上安装有第七动力机构,第七动力机构将转动力
依次传递给第三齿圈、第四齿圈,并驱动输入轴转动;
65.第三齿圈内外均设置有齿,第七动力机构同样固定在底板上,第七动力机构的输出轴与第三齿圈的内圈啮合,驱动第三齿圈外圈转动,通过转动副将动力传递给第四齿圈,第四齿圈与转动轴固定连接,从而实现第七动力机构控制转动轴的转动。
66.为了说明切换气缸如何实现第二安装板的前进或者后退,本发明采用底板上设置有切换气缸;切换气缸的伸出端与输入轴端部固定连接,并驱动第二安装板前进或后退,将转动轴与套筒连接轴连接或脱离;
67.切换气缸同样固定在底板中心位置,底板的伸出端与输入轴固定连接,实现第二安装板的前后运动。
68.为了说明抱臂组件的具体结构,本发明采用抱臂组件包括:
69.弧形抱臂,其一端与固定板转动连接;固定板呈圆周等分设置在底板周向上;主动臂,其一端与弧形抱臂固定连接,另一端与轴承外圈固定连接;第五齿圈,其与轴承外圈固定连接;第八动力机构,其固定在底板上,并将其输出端与第五齿圈内圈啮合,驱动轴承外圈相对于底板的转动;
70.由于底板始终保持不旋转状态,弧形抱臂通过固定板与底板连接,固定板与弧形抱臂连接处为旋转中心,主动臂一端与弧形抱臂连接,另一端与轴承的外圈连接,轴承的外圈上固定有第五齿圈,第五齿圈与底板上第八动力机构输出端啮合,从而实现轴承外圈转动,主动臂作用于弧形抱臂,将弧形抱臂报紧轮胎,限制轮胎的转动。
71.在本方案中,第一动力机构至第八动力机构可采用电机或者气缸或液压作为动力来源。
72.当需要拆卸轮胎时,通过底座的运动,将定位组件中心与轮胎的中心处于同一水平线上,抱臂组件抱紧轮胎,从而限制轮胎的转动;定位组件可发生旋转,将套筒连接轴一一对应相应螺栓后,通过平移组件将套筒连接轴与螺栓一一配合进行定位;驱动组件可与套筒连接轴尾部配合,从而驱动套筒连接轴转动,将螺栓从轮胎上进行拆卸;当轮胎需要安装时,将轮胎夹紧在抱臂组件上,通过底座的运动,将轮胎的轴线与轮胎转轴的轴线处于共线状态,轮胎螺栓安装在套筒连接轴上,将定位组件水平旋转对准轮胎上的螺栓孔,通过平移组件将轮胎螺栓装进螺栓孔内,通过驱动组件的转动,将螺栓旋进螺栓孔内;实现了轮胎的自动化拆装。
73.本发明的有益效果:本发明是一种车辆维保平台,通过承载协作机器人能够将地沟与动力装置集成在一起以及保持地沟清洁;通过维保协作机器人能够实现对车辆的不同高度进行维修或保养的功能,通过轮胎拆装协作机器人能够实现车辆的轮胎进行拆卸或安装。
附图说明
74.下面结合附图和实施例对本发明进一步说明。
75.图1是承载协作机器人的结构示意图;
76.图2是承载协作机器人板体的结构示意图;
77.图3是承载协作机器人升降单元的结构示意图;
78.图4是承载协作机器人螺旋输送机与排污槽配合结构示意图;
79.图5是承载协作机器人动力总成箱的结构示意图;
80.图6是维保协作机器人的结构示意图;
81.图7是图6a处放大图;
82.图8是维保协作机器人伸缩节的结构示意图;
83.图9是维保协作机器人第二升降平台的结构示意图;
84.图10是维保协作机器人小车的结构示意图;
85.图11是轮胎拆装协作机器人结构示意图;
86.图12是轮胎拆装协作机器人底座结构示意图;
87.图13是轮胎拆装协作机器人定位组件结构示意图;
88.图14是轮胎拆装协作机器人前端壳体转动原理图;
89.图15是轮胎拆装协作机器人定位组件另一视角结构示意图;
90.图16是轮胎拆装协作机器人驱动组件结构示意图;
91.图17是轮胎拆装协作机器人驱动组件另一视角结构示意图;
92.图18是轮胎拆装协作机器人第三齿圈结构示意图;
93.图19是轮胎拆装协作机器人抱臂组件结构示意图;
94.图20是轮胎拆装协作机器人抱臂组件另一视角结构示意图;
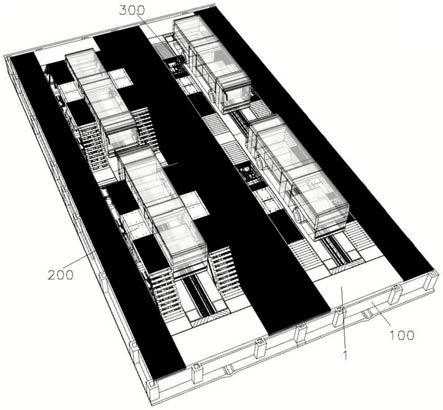
95.图21是本发明结构示意图。
96.图中:1
‑
地沟、2
‑
举升机、3
‑
第二格栅板、4
‑
导流板、5
‑
排污槽、6
‑
导流壁、7
‑
螺旋输送机、8
‑
立壁、9
‑
倾斜壁、10
‑
板体、11
‑
筋条、12
‑
升降单元、13
‑
伸缩梯、14
‑
警示板,15
‑
动力总成箱、16
‑
壳体、17
‑
电机、18
‑
第一离合器、19
‑
第二离合器、20
‑
第三离合器、21
‑
丝杆螺母、22
‑
丝杆、23
‑
新风系统、24
‑
废机油箱、25
‑
照明装置、26
‑
第一格栅板、承载协作机器人100;
97.200
‑
维保协作机器人、202
‑
侧向升降平台、203
‑
容置腔、204
‑
伸缩梯、205
‑
翻转臂、206
‑
滑槽、207
‑
从动臂、208
‑
液压缸、209
‑
伸缩段、2010
‑
等边三角形阶梯、2011
‑
伸缩节、2012
‑
插入段、2013
‑
空腔段、2014
‑
第二升降平台、2015
‑
剪叉装置、2016
‑
小车、2017
‑
把手;
98.300
‑
轮胎拆装协作机器人、301
‑
定位组件、3011
‑
套筒连接轴、3012
‑
前端壳体、3013
‑
第五动力机构、3014
‑
第一安装板、3015
‑
轴承、3016
‑
第一齿圈、3017
‑
底板、302
‑
平移组件、3021
‑
尾端壳体、3022
‑
直线模组、3023
‑
第四动力机构、30221
‑
滑轨、30222
‑
滑轮组、30223
‑
支板、30224
‑
滑轮、303
‑
驱动组件、3031
‑
第二安装板、3032
‑
第六动力机构、3033
‑
转动轴、3034
‑
第七动力机构、3035
‑
切换气缸、3036
‑
输入轴、3037
‑
第二齿圈、3038
‑
第三齿圈、3039
‑
第四齿圈、304
‑
抱臂组件、3041
‑
弧形抱臂、3042
‑
固定板、3043
‑
主动臂、3044
‑
第五齿圈、3045
‑
第八动力机构、305
‑
底座、3051
‑
水平旋转机构、3052
‑
第一动力机构、3053
‑
第一竖直旋转机构、3054
‑
第二动力机构、3055
‑
第二竖直旋转机构、3056
‑
第三动力机构。
具体实施方式
99.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
100.如图21所示,本发明是一种车辆维保平台,包括:地沟1,其适于停放维保车辆;承载协作机器人100,其适于将地沟1与动力装置集成在一起,以及保持地沟1清洁;维保协作机器人200,其位于车辆两侧,并适于对车辆的不同高度进行维修或保养;轮胎拆装协作机
器人300,其位于车辆两侧,并适于对车辆的轮胎进行拆卸或安装;
101.通过承载协作机器人能够将地沟与动力装置集成在一起以及保持地沟清洁;通过维保协作机器人能够实现对车辆的不同高度进行维修或保养的功能,通过轮胎拆装协作机器人能够实现车辆的轮胎进行拆卸或安装。
102.承载协作机器人100包括排污系统,其适于将地沟1表面的污渍导流至地沟1内底部,随后再沿地沟1长度方向排出至地沟1外;
103.在本方案中,在原有地沟的基础上增加排污系统,排污系统是通过水流对地沟表面进行清洗,随后将污渍冲刷至地沟底部,再将污渍从地沟底部排出。
104.如图1所示,为了说明地沟的具体结构,本发明采用地沟1内还设置有新风系统23,其适于向地沟1内鼓入新鲜空气;废机油箱24,其通过废机油管连接车辆;照明装置25,其适于照亮地沟1内部;第一格栅板26,其设置在地沟1底部,便于人的行走或物的放置;轨道,其沿地沟1长度方向设置在地沟1内,并适于供举升机运动;
105.第一格栅板底部就是螺旋输送机,第一格栅板上的污渍能够直接掉落至排污槽内,轨道的设置是为了供举升机进行平移运动。
106.如图1、4所示,为了具体说明排污系统的具体结构,本发明采用排污系统包括:第二格栅板3,其铺设在地沟1上端面两侧;导流板4,其设置在第二格栅板3下部;排污槽5,其沿地沟1长度方向开设在地沟1内底部;导流壁6,其适于将导流板6的污渍运输至排污槽5内;螺旋输送机7,其转动设置在排污槽5内;
107.在本方案中,第二格栅板的作用既能实现水流、污渍的穿过,又能防止零件落入地沟内部;第二格栅板和导流板呈上下堆叠设置,第二格栅板起到过滤作用,导流板能够将水流汇聚且定向流动;导流壁起到导向作用,水流以及污渍会在导流壁的引流下流入至排污槽内,排污槽内设置有螺旋输送机,通过螺旋输送机桨叶的转动,将污渍排出至地沟外。
108.如图1所示,为了说明导流壁的具体结构,本发明采用导流壁6包括竖直设置的立壁8,以及倾斜向下设置的倾斜壁9;污渍经立壁8上开设的通孔流至倾斜壁9上,经倾斜壁9导流至排污槽5内;
109.在本方案中,立壁能够起到支撑作用,污渍经通孔穿过立壁,随后再经倾斜壁的导流流入至排污槽内;倾斜壁为倾斜设置,污渍能够在其重力的作用下自动流入至排污槽内。
110.如图2所示,为了说明导流板的具体结构,本发明采用导流板6包括板体10,以及间隔凸出设置在板体10上多个筋条11;其中,筋条11的长度方向垂直于地沟1的长度方向;
111.在本方案中,污渍和水流会经两两筋条的间隙处导流至立壁上开设的通孔处。
112.如图3所示,为了方便人与物进入地沟内,本发明采用位于地沟1入口处设置有沿地沟高度方向升降的升降单元12;伸缩梯13,其一端与地沟1底部连接,一端与升降单元12连接;警示板14,其竖直设置在升降单元12上;
113.升降单元、支撑板、警示板同步上下运动,警示板处于升降单元的高位时,将其端面露出地沟外,提醒操作人员禁止进入。
114.在车辆进入地沟前,地沟前端上还设置有扫描车牌的装置,从而获取车辆的轴距信息,从而能够驱动举升机平移至相应位置后抬起车辆。
115.为了便于将车辆抬起,本发明还设置有举升机,其适于沿所述地沟1长度方向移动后,抬起车辆;当车辆停放在地沟1上时,举升机将车辆抬起,便于对车辆底部的电机或者变
速箱进行维修和更换。
116.如图3、5所示,常规的地沟活动部件的动力单元都是分散在基座外的,这就导致整体装置集成度低,进而导致占地面积大;此外散装的动力设备搬运困难,且动力单元复杂;综上,如何实现整体装置集成度高,节约占地面积,本发明采用地沟1的前或后端面设置有动力总成箱15;动力总成箱15适于控制举升机的前后运动、螺旋输送机7的转动及其升降单元12的升降;
117.在本方案中,将螺旋输送机、举升机前后移动、升降单元升降的动力单元都安装在动力总成箱内,从而实现整体装置集成度高,占地面积小。
118.如图3、5所示,为了说明动力总成箱具体结构,本发明采用动力总成箱包括:壳体16;电机17,其输出端通过减速器分别连接第一离合器18、第二离合器19、第三离合器20;第一离合器18适于控制举升机的前后运动;第二离合器19通过齿轮传动适于控制螺旋输送机7的转动;第三离合器20经同步带控制丝杆螺母21沿丝杆22做升降运动,其中丝杆螺母21与升降单元12固定连接;
119.也就是说,在动力总成箱内只设置有一个电机,通过与第一离合器或第二离合器或第三离合器的配合,将动力传递至举升机或螺旋输送机或升降单元上;进而,在本动力总成箱中,只能控制一个部件的运动,其他两部件处于不工作状态。
120.如图6所示,维保协作机器人200包括侧向升降平台202,其位于地沟1及车辆两侧;容置腔203,其开设在地沟1上端面,并适于放置侧向升降平台202;驱动机构,其对称设置在侧向升降平台202两侧,并适于驱动侧向升降平台202升降;伸缩梯,其一端与容置腔203底部连接,另一端与侧向升降平台2连接;当驱动机构驱动侧向升降平台202上升时,伸缩梯处于展开状态。
121.在本方案中,侧向升降平台由驱动机构控制升降,侧向升降平台在不工作时放置在容置腔内,此时侧向升降平台的上端面与地沟的上端面齐平;在侧向升降平台的两侧设置有伸缩梯,伸缩梯与侧向升降平台的升降同步处于展开或者回收状态,侧向升降平台上放置有物品或站立操作人员,物品或人员可跟随侧向升降平台上下运动,伸缩梯的设置也是便于操作人员从地沟处斜向上至侧向升降平台上或从升降平台上斜向下至地沟上;此外,当侧向升降平台处于不工作状态时,侧向升降平台的上端面与地沟齐平,便于操作人员、车、物品的运动。
122.如图6所示,为了说明驱动机构的具体结构,本发明采用驱动机构包括:翻转臂205,其一端与容置腔203底部铰接,另一端活动设置在侧向升降平台202底部的滑槽206内;从动臂207,其一端与容置腔203底部铰接,从动臂207的臂身上设置有连接件,连接件与翻转臂205的臂身连接;液压缸208,其一端与地沟201铰接,其活塞杆端部与从动臂207的另一端铰接;当液压缸208的活塞杆伸出时,带动从动臂207转动,并在连接件的带动下,翻转臂205跟随从动臂207发生转动,翻转臂205的端部在滑槽206内向滑槽206的外侧运动,侧向升降平台202上升;
123.在本方案中,在侧向升降平台两侧对称设置有驱动机构,也就是说,升降平台升降需要两驱动机构,每一驱动机构包括从动臂、翻转臂、液压缸、连接件;液压缸与从动臂连接,翻转臂与侧向升降平台连接,从动臂与翻转臂之间通过连接件连接;液压缸作为动力来源依次将动力传递给从动臂、连接件、翻转臂、侧向升降平台,最终实现侧向升降平台的升
降。
124.如图6、7、8所示,为了说明伸缩梯的具体结构,本发明采用伸缩梯204包括:平行设置的伸缩段209以及连接两伸缩段209的多个等边三角形阶梯2010;每一伸缩段209包括多个伸缩节2011;每一伸缩节2011包括插入段2012,以及供另一伸缩节2011的插入段2012插入的空腔段2013;等边三角形阶梯2010顶点处与伸缩节2011铰接。
125.伸缩段包括多个伸缩节,其中一伸缩节的插入段可插入另一伸缩节的空腔段,也就是说,伸缩段由于伸缩节的结构可实现伸缩,等边三角形阶梯的其中两顶点分别铰接在伸缩节上,伸缩节伸缩的过程中,等边三角形阶梯只进行升降运动,从而实现等边三角形阶梯的其中一边始终处于水平状态,便于工作人员的脚踏。
126.如图9、10所示,此外,为了便于搬运车辆底部的电池,本发明采用侧向升降平台202上通过剪叉装置2015设置有可升降的第二升降平台2014;第二升降平台2014可上升至与侧向升降平台202齐平;当第二升降平台2014下降至低位时,第二升降平台2014上放置有取电池的小车2016,小车2016顶面与侧向升降平台202齐平;
127.在本方案中,升降平台内还通过剪叉装置设置有可升降的第二升降平台;第二升降平台下降,与升降平台形成一容纳小车的腔室;
128.当电池从车辆底部侧边抽出之前,第二升降平台上升,此时第二升降平台顶面与升降平台的顶面齐平,此时将电池置于小车上,随后将小车推走,完成电池的拆卸,反之实现电池的安装。
129.如图9所示,为了便于小车推动,本发明采用小车2016上铰接有可翻转的把手2017;
130.当需要推动小车时,通过将把手翻转至竖直状态,通过手持把手将小车推出平台外;当把手翻转至收纳状态时,此时把手与升降台齐平,便于物品的放置与人员的行走。
131.如图11所示,轮胎拆装协作机器人300包括定位组件301,其包括圆周布置的多个套筒连接轴3011;当定位组件301绕其轴向方向自转,将套筒连接轴3011对应相应轮胎螺栓后,通过平移组件302将套筒连接轴3011头部与轮胎螺栓配合;驱动组件303,其适于插入至少一个套筒连接轴3011尾部,并驱动套筒连接轴同步转动;抱臂组件304,其适于旋转后抱紧轮胎,限制轮胎转动;底座305,其适于将定位组件301处于收纳状态,或将轮胎的圆心与定位组件301的圆心处于水平同轴状态;
132.在本方案中,当需要拆卸轮胎时,通过底座的运动,将定位组件中心与轮胎的中心处于同一水平线上,抱臂组件抱紧轮胎,从而限制轮胎的转动;定位组件可发生旋转,将套筒连接轴一一对应相应螺栓后,通过平移组件将套筒连接轴与螺栓一一配合进行定位;驱动组件可与套筒连接轴尾部配合,从而驱动套筒连接轴转动,将螺栓从轮胎上进行拆卸;
133.当轮胎需要安装时,将轮胎夹紧在抱臂组件上,通过底座的运动,将轮胎的轴线与轮胎转轴的轴线处于共线状态,轮胎螺栓安装在套筒连接轴上,将定位组件水平旋转对准轮胎上的螺栓孔,通过平移组件将轮胎螺栓装进螺栓孔内,通过驱动组件的转动,将螺栓旋进螺栓孔内。
134.如图12所示,为了说明底座的具体结构,本发明采用底座5包括:水平旋转机构3051,其由第一动力机构3052控制,驱动其输出端水平旋转;第一竖直旋转机构3053,其与水平旋转机构3051的输出端连接,并由第二动力机构3054控制,驱动其输出端竖直摆动;第
二竖直旋转机构3055,其与第一竖直旋转机构3053的输出端连接,并由第三动力机构3056控制,驱动输出端竖直摆动;
135.通过底座实现三种运动,水平旋转机构对应的是水平面上的转动;第一竖直旋转机构、第二竖直旋转机构对应的是竖直面上的转动;分别由第一、二、三动力机构对应控制;
136.水平旋转机能够将整体的拆胎机构正面或者侧面朝向轮胎;第一竖直旋转机构、第二竖直旋转机构能够将定位组件对准轮胎的中心,也就是说,第一竖直旋转机构、第二竖直旋转机构在竖直面上能够实现两轴的运动。
137.如图12所示,为了说明平移组件的具体结构,本发明采用平移组件302包括:尾端壳体3021;直线模组3022,其由第四动力机构3023控制,驱动尾端壳体3021相对于底座305的直线运动;
138.尾端壳体与定位组件连接,尾端壳体的运动直线运动从而实现定位组件的直线运动;直线模组与底座连接,具体说,直线模组与第三动力机构控制的输出端平面连接。
139.如图12所示,为了说明直线模组的具体结构,本发明采用直线模组3022包括:滑轨30221,其对称设置在尾端壳体3021底部;滑轮组30222,其对称转动设置在底座305顶面,并作用于滑轨30222两侧;支板30223,其竖直设置在底座305顶面,并穿过尾端壳体3021;滑轮30224,其转动设置在支板30223端部,并作用于滑轨30221上端面;主动轮,其与第四动力机构3023输出端连接,并作用于其中一滑轨30221内侧面;
140.滑轮组夹紧滑轨两侧,支板竖直设置,并与滑轮配合,限制尾端壳体在运动过程中发生翘起现象,始终保持尾端壳体处于水平运动状态,第四动力机构作为动力源,驱动滑轨的移动,从而实现尾端壳体相对于底座的运动。
141.如图13所示,为了说明定位组件的具体结构,本发明采用定位组件301包括:前端壳体3012,其由第五动力机构3013控制转动;第一安装板3014,其固定设置在前端壳体3013内;多个套筒连接轴3011,其呈圆周设置在第一安装板3014上;
142.前端壳体的转动由第五动力机构控制实现转动,从而带动第一安装板上的多个套筒连接轴旋转后对准轮胎螺栓,在上述平移组件的带动下,将套筒连接轴与螺栓实现插接配合。
143.如图13、14、15所示,为了说明第五动力机构是如何控制前端壳体的转动,本发明采用前端壳体3012后端穿过轴承3015并固定有第一齿圈3016;轴承3015的外圈与前端壳体3012定连接,轴承3015的内圈连接有底板3017;底板3017上安装有第五动力机构3013;第五动力机构3013的输出端穿过底板3017,并与第一齿圈3016的内圈啮合;
144.前端壳体的端部固定有第一齿圈,且穿过轴承,轴承的内圈与底板固定连接,轴承外圈与前端壳体固定连接,底板上设置有与第一齿圈啮合的第五动力机构,第五动力机构转动,将动力依次传递给第一齿圈、前端壳体,实现前端壳体的转动;为了进一步实现转动的稳定性,前端壳体还与轴承外圈连接,也就是说,第五动力机构转动,轴承的外圈也发生转动。
145.如图16、17、18所示,为了说明驱动组件的具体结构,本发明采用驱动组件303包括:第二安装板3031,其由第六动力机构3032驱动转动;转动轴3033,其由第七动力机构3034控制驱动自转;当第六动力机构3032驱动第二安装板转动,将转动轴3033与套筒连接轴3011处于同一直线上时,切换气缸3035驱动第二安装板3031前行,并将转动轴3033的头
部与套筒连接轴3011尾部配合,第七动力机构3034控制转动轴转动,并带动套筒连接轴3011转动;
146.驱动组件由三种运动方式,分别是:1、第六动力机构驱动第二安装板的转动;2、第七动力机构驱动转动轴的转动;3、切换气缸实现第二安装的前后运动。
147.如图16、17、18所示,为了说明第六动力机构如何驱动第二安装板的转动,本发明采用第二安装板3031具有一输入轴3036;输入轴3036上套定有第二齿圈3037;底板3017,其上安装有第六动力机构3032;第六动力机构3032的输出端与第二齿圈3037啮合,并驱动第二齿圈3037转动;
148.底板为上述定位组件提及的底板,第六动力机构输出的转动力依次传递给第二齿圈,输入轴,从而实现第二安装板的转动。
149.如图16、17、18所示,为了说明第七动力机构如何驱动转动轴的转动,本发明采用输入轴3036上活动套设有第三齿圈3038;转动轴3036上套定有第四齿圈3039;底板3017上安装有第七动力机构3034,第七动力机构3034将转动力依次传递给第三齿圈3038、第四齿圈3039,并驱动输入轴3036转动;
150.第三齿圈内外均设置有齿,第七动力机构同样固定在底板上,第七动力机构的输出轴与第三齿圈的内圈啮合,驱动第三齿圈外圈转动,通过转动副将动力传递给第四齿圈,第四齿圈与转动轴固定连接,从而实现第七动力机构控制转动轴的转动。
151.如图16、17、18所示,为了说明切换气缸如何实现第二安装板的前进或者后退,本发明采用底板3017上设置有切换气缸3035;切换气缸3035的伸出端与输入轴3036端部固定连接,并驱动第二安装板3031前进或后退,将转动轴3033与套筒连接轴3011连接或脱离;
152.切换气缸同样固定在底板中心位置,底板的伸出端与输入轴固定连接,实现第二安装板的前后运动。
153.如图19、20所示,为了说明抱臂组件的具体结构,本发明采用抱臂组件304包括:弧形抱臂3041,其一端与固定板3042转动连接;固定板3042呈圆周等分设置在底板3017周向上;主动臂3043,其一端与弧形抱臂3041固定连接,另一端与轴承3015外圈固定连接;第五齿圈3044,其与轴承3015外圈固定连接;第八动力机构3045,其固定在底板3017上,并将其输出端与第五齿圈3044内圈啮合,驱动轴承3015外圈相对于底板3017的转动;
154.由于底板始终保持不旋转状态,弧形抱臂通过固定板与底板连接,固定板与弧形抱臂连接处为旋转中心,主动臂一端与弧形抱臂连接,另一端与轴承的外圈连接,轴承的外圈上固定有第五齿圈,第五齿圈与底板上第八动力机构输出端啮合,从而实现轴承外圈转动,主动臂作用于弧形抱臂,将弧形抱臂报紧轮胎,限制轮胎的转动。
155.当需要拆卸轮胎时,通过底座的运动,将定位组件中心与轮胎的中心处于同一水平线上,抱臂组件抱紧轮胎,从而限制轮胎的转动;定位组件可发生旋转,将套筒连接轴一一对应相应螺栓后,通过平移组件将套筒连接轴与螺栓一一配合进行定位;驱动组件可与套筒连接轴尾部配合,从而驱动套筒连接轴转动,将螺栓从轮胎上进行拆卸;当轮胎需要安装时,将轮胎夹紧在抱臂组件上,通过底座的运动,将轮胎的轴线与轮胎转轴的轴线处于共线状态,轮胎螺栓安装在套筒连接轴上,将定位组件水平旋转对准轮胎上的螺栓孔,通过平移组件将轮胎螺栓装进螺栓孔内,通过驱动组件的转动,将螺栓旋进螺栓孔内;实现了轮胎的自动化拆装。
156.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1